This category contains pages about Private Pilot License theory.
Some content can overlap over multiple subjects, this is because they are important in each context and we need to know as much aspects as possible about them to fully understand.
This is the multi-page printable view of this section. Click here to print.
This category contains pages about Private Pilot License theory.
Some content can overlap over multiple subjects, this is because they are important in each context and we need to know as much aspects as possible about them to fully understand.
For a live overview of my flight lessons, visit: https://flighttools.justinverstijnen.nl/flightlessontracker
This page can contain a collection of personal notes, steps to remember, finished and unfinished content. Please excuse brevity.
Do not use specific information given like fuel flow, landing/take-off distances for your flights. Always refer to the POH of your exact plane for flight preparation. My information is just for references that I used.
Before we step into an airplane we are required to know the aircraft performance in our particular situation. We can ask ourselves questions like:
Now these are not questions we will guess or something but we carefully calculate using numbers and graphs from the pilot operating handbook (POH) of our particular plane type.
In this module we will dive deeper in these questions and look at how we can make these calculations.
The air density is a unit of how much air molecules a certain part of the air contains. We will pronounce this as kg/m³. In the International Standard Atmosphere which is the baseline reference for our pilots, the definition of this is at mean sea level that one cubical meter air (1000 liters) weighs 1,225 kilograms. So 1,225 kg/m³.
Air density is determined by a few factors like air pressure and temperature and derives from the general gas equation:
Density (ρ) = P / (R x T)
An example calculation using todays numbers:
METAR EHLE 031055Z AUTO 24010KT 9999 FEW016/// BKN019/// BKN022/// 18/14 Q1010 TEMPO 6000 -SHRA SCT018CB BKN022
101000 : (287 x 291) = 1,209 kg/m³
This tells us that today the air is less dense than ISA, meaning we can expect worse aircraft performance. A result of the less density is the higher temperature (18 degrees instead of 15 according to ISA).
To make this calculation somewhat easier for pilots to make, we have something called the Density Altitude. This is an altitude indication of how your aircraft will perform according to ISA. This makes these calculations much easier as we talk in altitudes instead of density like 1,225kg/m³. For example, if the density altitude is 3000ft we can expect performance as we are on 3000ft. This doesn’t mean we are actually on that altitude but is the altitude corrected for the actual air density.
Every 1c degree deviation of ISA temperature, we take 120ft as rule of thumb. If the air is colder than ISA this is a negative number, resulting in a lower altitude as the air is more dense. To calculate the density altitude we use the following formula:
Pressure altitude + (ISA DEV x 120) =
In the Netherlands, this density altitude often doesn’t make huge differences, but in countries with high elevations this can make huge differences in flight performance. Especially if you don’t take it into account. Let’s make up an example of Sedona Airport in the USA, the training airport when playing Microsoft Flight Simulator.
METAR KSEZ 032035Z AUTO 03008KT 9999 CAVOK 37/16 Q1018 NOSIG(corrected for European readers)
As this airport has an elevation of 4825 ft, we are a huge portion away from sea level. The airport also is in the rocky mountains range making the temperatures huge.
To calculate density altitude, we need the pressure altitude first. This is the “ISA” altitude corrected for active air pressure. This is 4825 - 150ft = 4675 ft. As we have 5 hPa higher air pressure than ISA this is a little win. Now the density altitude.
37 degrees - 15 = 22 degrees of ISA deviation.
4675 + (22 x 120) = 7.315 ft Density altitude, which is almost 3.000ft higher
The weight of an aircraft is a key factor to determine the flying performances. With the weight, we can calculate almost every V speed and the distance required for climb, take-off and landing. An aircraft is designed to operate in a specific weight range because exceeding this would result in unflyable planes with performance and controls not working as intended.
The key point here are:
Why calculating Mass and Balance is being so important is partly described in this video, where the center of gravity of the plane shifted fatally to the aft part of the plane: https://www.youtube.com/watch?v=hvZEr3IkLJI
As mass and weight are mostly the same (if not talking about G forces), I continue to use the word weight.
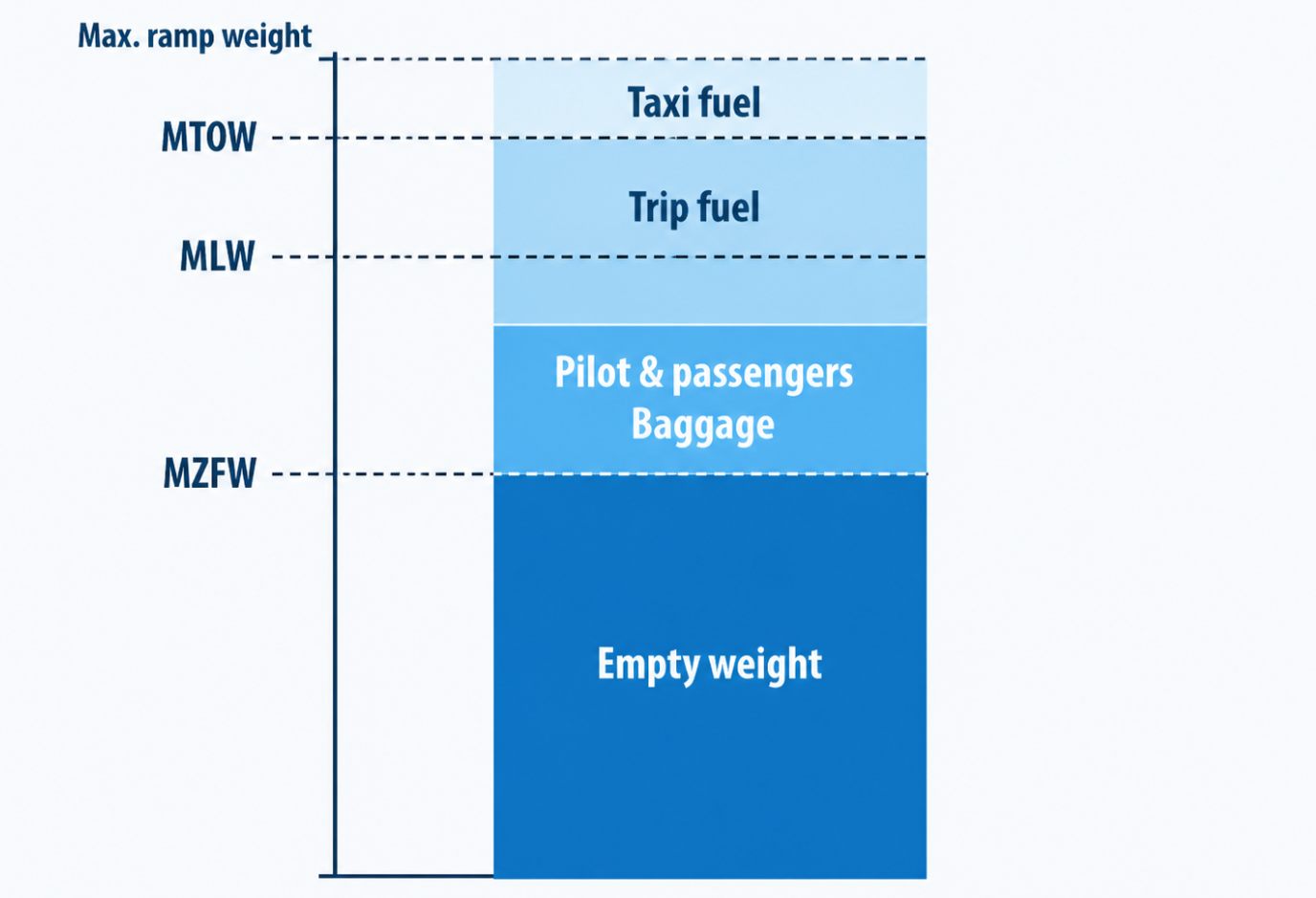
We have two primary reasons why planes have maximum weights where they are certified for:
Aircraft manufacturers use these terms to indicate the limits of weight for their aircrafts:
| Limit name | Abbreviation | Description |
|---|---|---|
| Maximum ramp weight | This is the overall maximum weight of the plane excluding calculated taxi-fuel. This is the limit of air plane before even moving to the runway. | |
| Maximum take-off weight | MTOW | This is the maximum weight the aircraft can be at take-off. Above this weight the forces must work really hard, exceeding structural limits where the plane is not designed for. |
| Maximum zero-fuel weight | MZFW | This is the maximum weight of the aircraft excluding usable fuel. |
| Maximum landing weight | MLW | This is the maximum weight at landing. When landing, the full weight of the plane must get on the ground, possibly harder than needed. This often results in the maximum landing weight being lower than the take-off weight. |
Exceeding these weights will result in the plane being classified as un-airworthy.
When performing fuel and weight calculations and realising that we cannot take-off from a runway with a certain mass, you must re-do your calculations in terms of weight and fuel. To lower the amount of runway needed, you need to decrease the weight.
To determine an aircrafts weight, we have to calculate the actual weight of an aircraft. This is basically a sum of all known weights.
| Weight name | Abbreviation | Description |
|---|---|---|
| Basic empty weight | BEW | The basic weight of a plane without usable fuel, including unusable fuel. It also includes structure, engine etc.This is a number weighed by the maintenance company (CAMO). My training Cessna 172 for example is more or less 700kg. |
| Crew and passengers weight | POB | The persons’ weight of every pilot and passenger combined. Sometimes its better to “overguess” than actually asking people ;). |
| Baggage weight | The weight of the baggage. | |
| Fuel weight | The weight of the usable fuel which we calculate based on the type of fuel. |
The sum of all those weights give us the actual of gross weight and will decrease during flight as the fuel is being consumed.
We calculate the weight of the fuel in our plane by picking default numbers based on the fuel we use. This is based on fuel density where we calculate the volume multiplied by density:
And we can use these numbers for conversion:
Tip: use my Unit conversion tool https://flighttools.justinverstijnen.nl/unitcalculator
To calculate fuel, we have different categories where we use different parts of fuel. We must have enough fuel on board for the complete flight, possible diversion and even more than that. As fuel calculations are very important we determine the amount using these terms:
| Fuel category | Used for |
|---|---|
| Taxi fuel | Taxiing to the runway excluding taxi after landing |
| Trip fuel | Take-off, climb, cruise, descend, approach and landing |
| Reserve fuel | Three types of reserve fuels needed in some situations |
| Contingency fuel | (+~5%) Fuel for unforeseen circumstances like wind, deferring routes, holding patterns |
| Alternate fuel | The fuel needed from destination to alternate including go around at destination, climb, cruise, descend, approach and landing on alternate. |
| Final reserve fuel | The minimum fuel that must be on board after landing. VFR flights this must be at least 30 - 45 minutes. This may also never be touched. |
| Extra fuel | All extra fuel on board for possible connected flights or flights to aerodromes without fuel station. |
| Block fuel | The total amount of fuel when departing from your parking place/ramp. |
We base the forseen fuel consumption on the numbers of the pilot operating handbook.
The center of gravity (CG) is the central point of the gravity force. This point must be between the boundaries of the plane, as this has effect on the aircrafts performance. This center of gravity in general aviation aircraft is often determined in numbers of inches from a reference point. This reference point is called the “datum”. The reference point are mostly:
The pilot operating handbook will describe what the datum of your particular plane is. This point must be the same for that same aircraft at all flights.
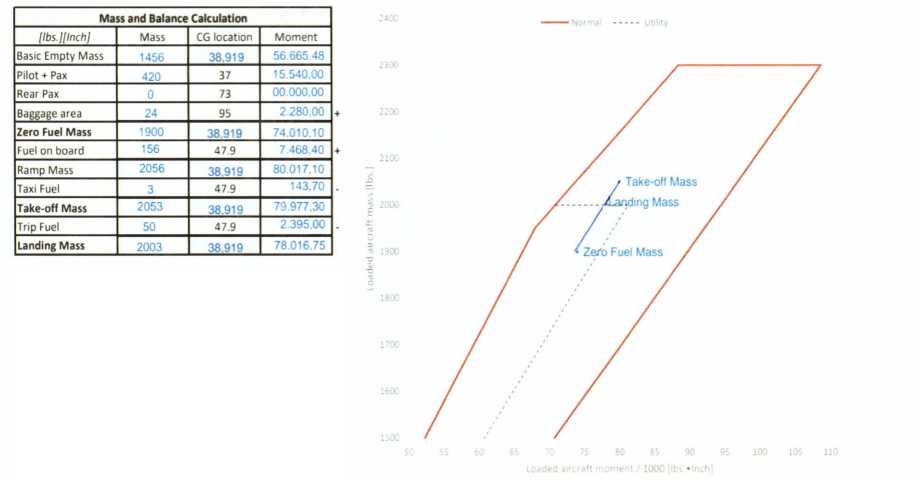
Here I created a mass and balance sheet for a Cessna 172 in my second flight lesson, fully within the technical limits of the aircraft.
This states what the forward and after limits of the plane are in terms of center of gravity and how much weight we may carry. The whole flight, your weight and balance must be within the performance envelopes. This is the red area on the graph above.
To calculate the mass and balance, note all weights like done in the picture above and lookup the CG locations of your plane in the POH. Then its simply a multiply-sum where the weight must be multiplied by the CG location which gives the moment-number -> the resulting turning effect. Always use a method with a table and graphic to be sure about your aircrafts limits.
To determine the center of gravity the moments are very important. We will talk about this three terms here:
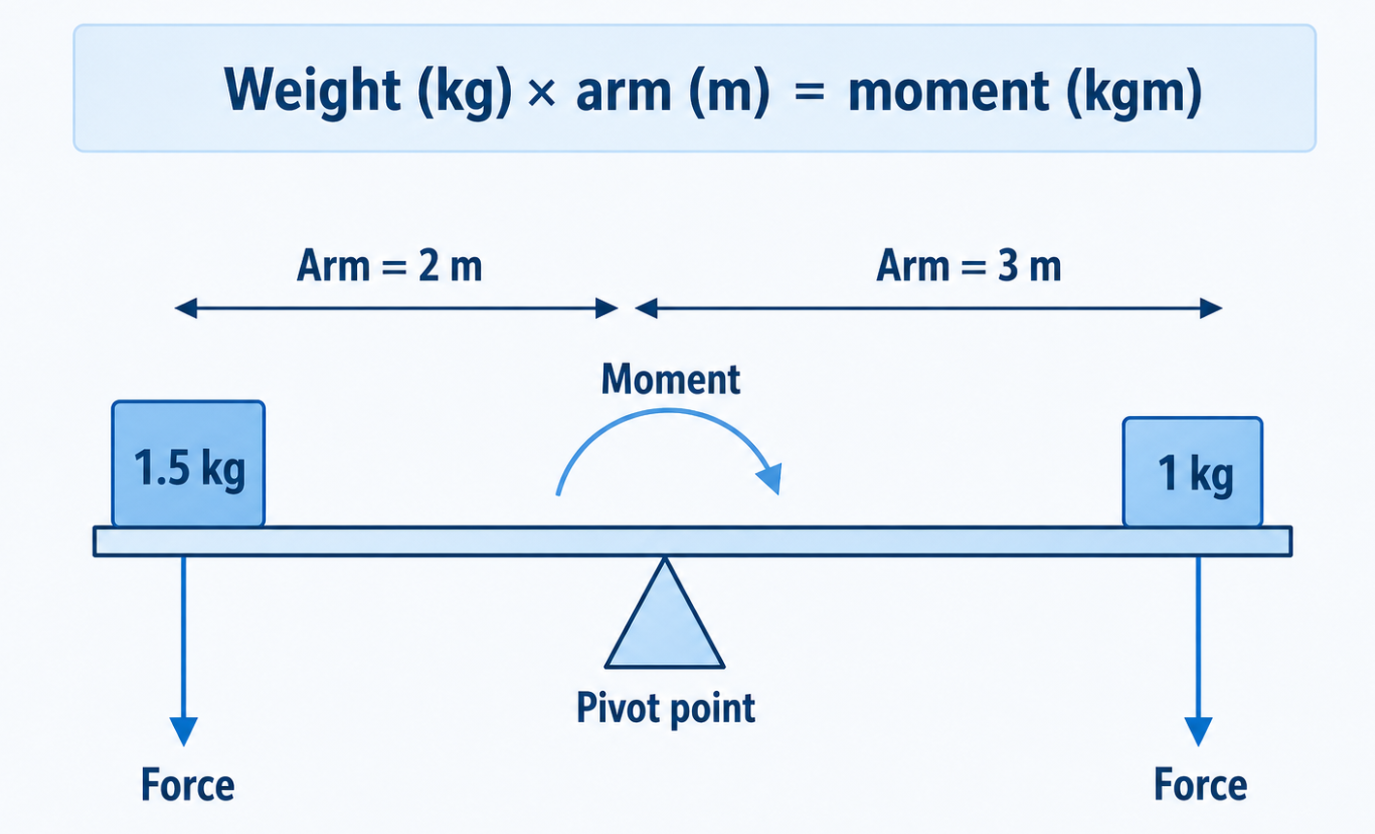
Arm and moment in picture.
During the flight, the center of gravity always will shift somewhat because of thefuel consumption. This effect can be bigger when the tanks are further away from the center of gravity. When having wingtanks, this effect is small but be aware to stay within the envelope of the mass and balance scheme. This is also the reason we always calculate the zero fuel weight.
Calculating take-off and landing performances is crucial to us pilots as we want to know if we can land on a particular airport and runway with particular circumstances. To overcome shortage of runway, we calculate the distance we need according to the numbers in the POH. As the weather is never completely the same, we use the International Standard Atmosphere as reference point.
The take-off consists of 2 different phases:
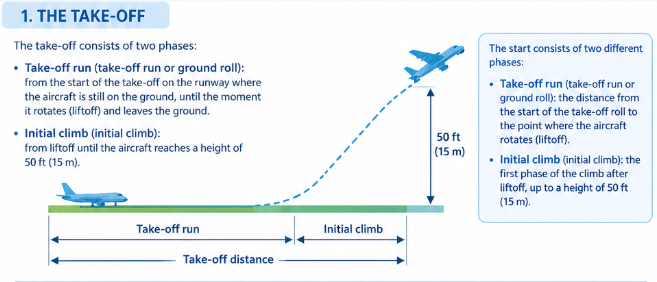
In the middle of the whole take-off we have Vr speed which we start rotating to get in the air. This is the aircrafts’ designed speed when taking-off is possible. We also know a Vlof speed which is the speed the plane comes loose of the ground, which is mostly close to Vr speed. We use this speed often in soft field take-offs to quickly get off the ground and win speed using ground effect.
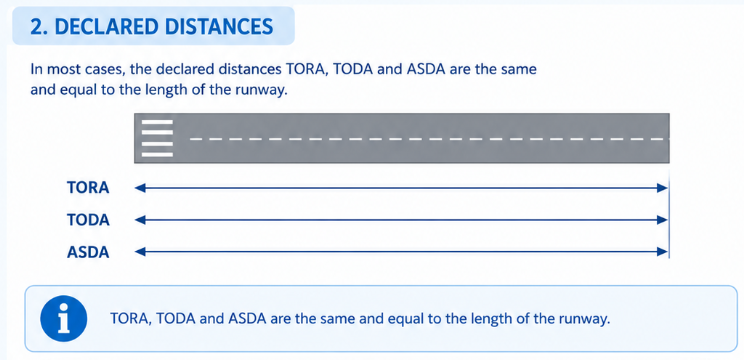
Determining the take-off performance is part of flight preparation. The needed distances must fit within the available distances at that time. We use three different terms to indicate the available runway length:
In the most simple cases, these three values are exactly the same, but this is not always the case.
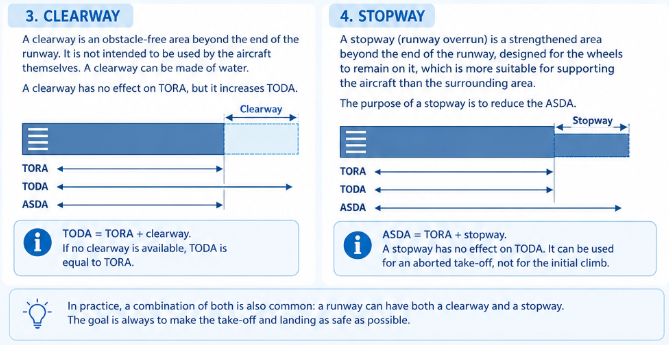
Much airports around the world have additions to the runways for safety and ease of use. The 2 categories are:
Stopway : A paved (verhard) addition to the runway only used for rejected take-offs (ASDA)
Clearway : A clear-of-objects addition to the runway which can only be used for the climb to 50ft (TODA). This can also be sand or even water.
Sometimes, the stopway and clearway are combined as the image below states.
We devide the landing phase into two phases:
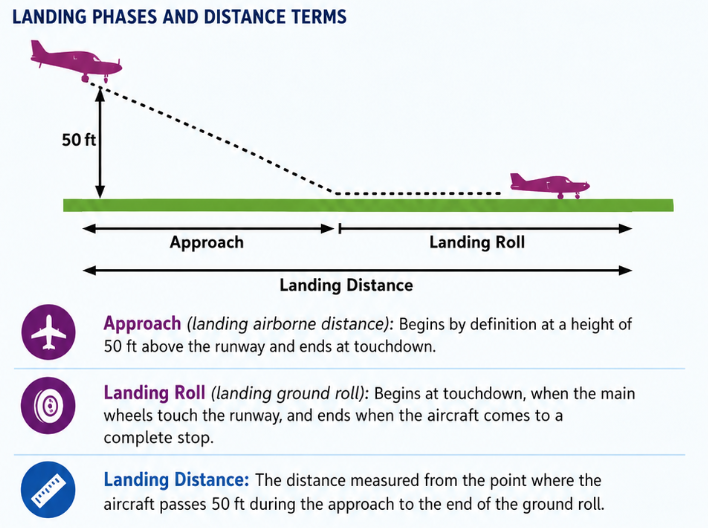
The landing distance is therefore calculated starting from that 50ft point all the way till the end of the ground roll. The landing distance available (LDA) is the distance from runway threshold till the end of the runway which can be found in the AIP. Some airports have a displaced threshold where the runway doesnt start at the beginning of the runway material.
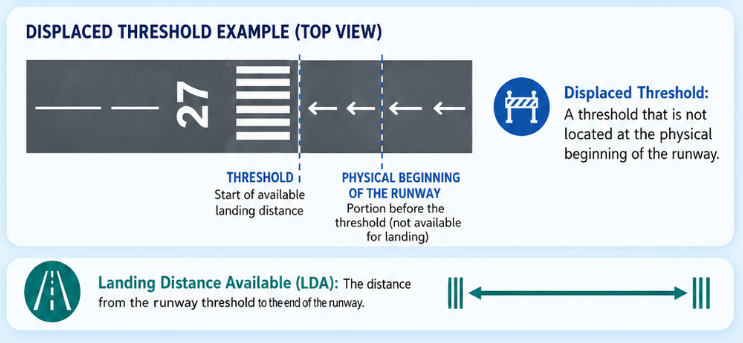
The part before the threshold can be used for the take-off but not for landing. This does also count for a stopway and clearway.
https://flightblog.justinverstijnen.nl/ppl-theory-fpp/#density-altitude
There are multiple factors influencing the take-off and landing distances which are:
An increase of weight requires us to make more speed, therefore increasing the take-off distance. As the weight factor increases, we also need to produce more lift and also requiring in a higher speed (Vlof). You can find the impact of weight on the take-off distances in the POH.
A rule of thumb we can use in general aviation aircraft is: an increase of 10% weight extends the required distance with 20%.
When landing, the weight will also increase our landing distance. More weight means a longer distance to stop that kinectic energy. More weight sometimes results in a higher approach speed. When landing after a flight, we have less fuel so also less weight. This lowers the gross weight. A good best practice is to use the take-off weight for your landing calculation, so you calculate with the numbers from the start.
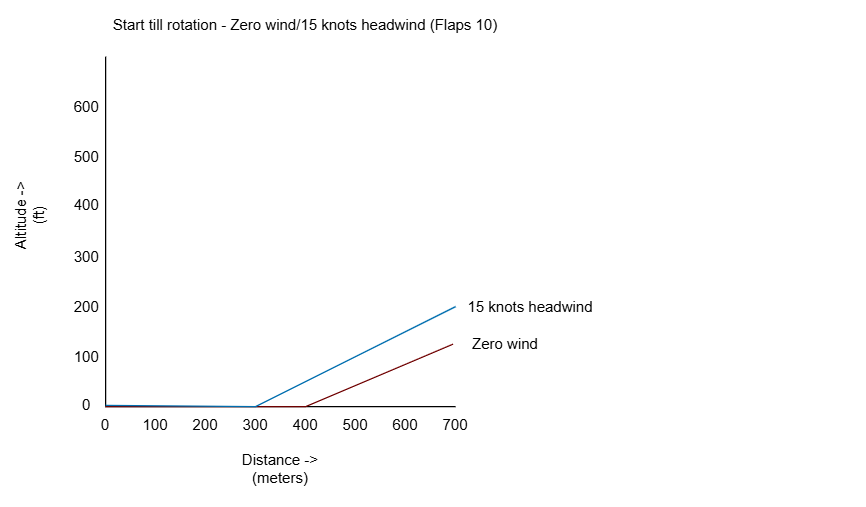
The wind also is a major factor in take-off distances. As an aircraft uses air masses to fly through, we get more of that air by flying into the wind, having Headwind. Therefore increasing our TAS and decreasing ground speed, resulting in needing less take-off distance.
To give an indication of the differences check out the picture below, altough with headwind we will be able to reach a much steeper climb:
The density of the air is also an important factor of the take-off and landing distance required. As we know, the density of the air is a factor in the lift formula:
| 1/2 ρ V² | CL | Surface |
|---|---|---|
| The dynamic pressure of the incoming airflow (TAS) | Lift Coefficient | The surface of the wing |
The Rho (ρ) describes the density of the air. Altough the Rho and Airspeed are somewhat related as they both are in this formula:
Factors which influence the Density altitude and so our distances, which can obviously be a combined factor:
In general aviation aircraft, the pressure altitude is enough as the tables and graphics in POH’s already contain this correction for temperature.
To learn more about Density Altitude, check out: https://flightblog.justinverstijnen.nl/ppl-theory-fpp/#density-altitude
The approach speed is often referred as the stall-speed multiplied by 1,3. In some cases we need a higher approach speed than normal, like when having more weight, flapless landing or weather conditions like gusting winds.
The state of the runway is also an important factor for our required distances. The state is determined by three parameters:
As the surface of course is also a factor on our total needed distance for take-off and landing. A grass runway has a longer ground-roll than a asphalt runway for example.
A slope in the runway, especially in mountain-rich area’s is also a major factor in take-off and landing performance. This slope is described in a percentage. This percentage is based on the difference between elevation of the threshold and end, divided by the runway length multiplied by 100. If this is a difference of more than 2 percent, this will be mentioned on the airport-charts and AIP.
Taking off while going up on the slope results in a slower take-off needing more of the distance. Taking off downslope results in a shorter distance as gravity will help us gaining speed.
When performing short-field or soft field take-offs, flaps are recommended to use. Flaps increase lift, needing less runway for lifting off. This also decreases our ground roll, but increases some drag on our plane. This will result in a less steep climb-out and slower climb speed. We mostly retract them at around 200ft AGL.
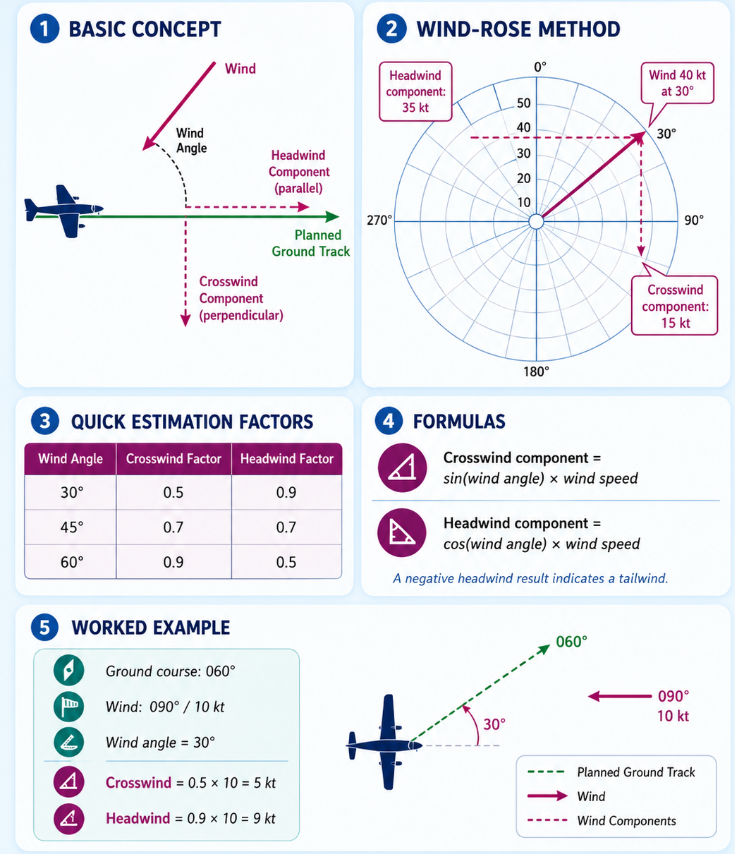
Winds can be divided into two different components when flying an aircraft:
The sine and cosine are trigonometric functions to calculate a value of an angle.
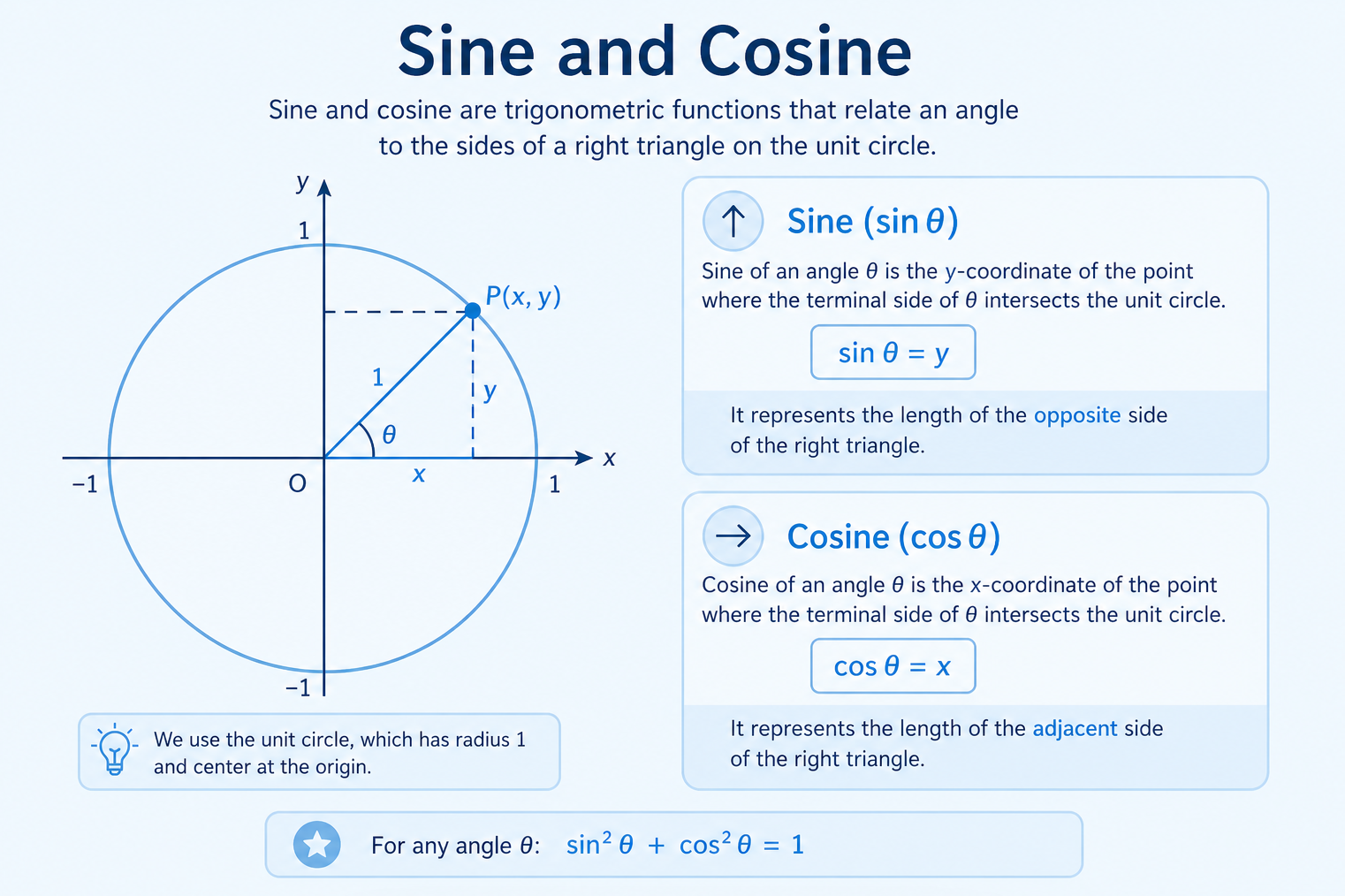
In aviation we mostly use the much easier version described above, but now you have seen the theory about these two functions.
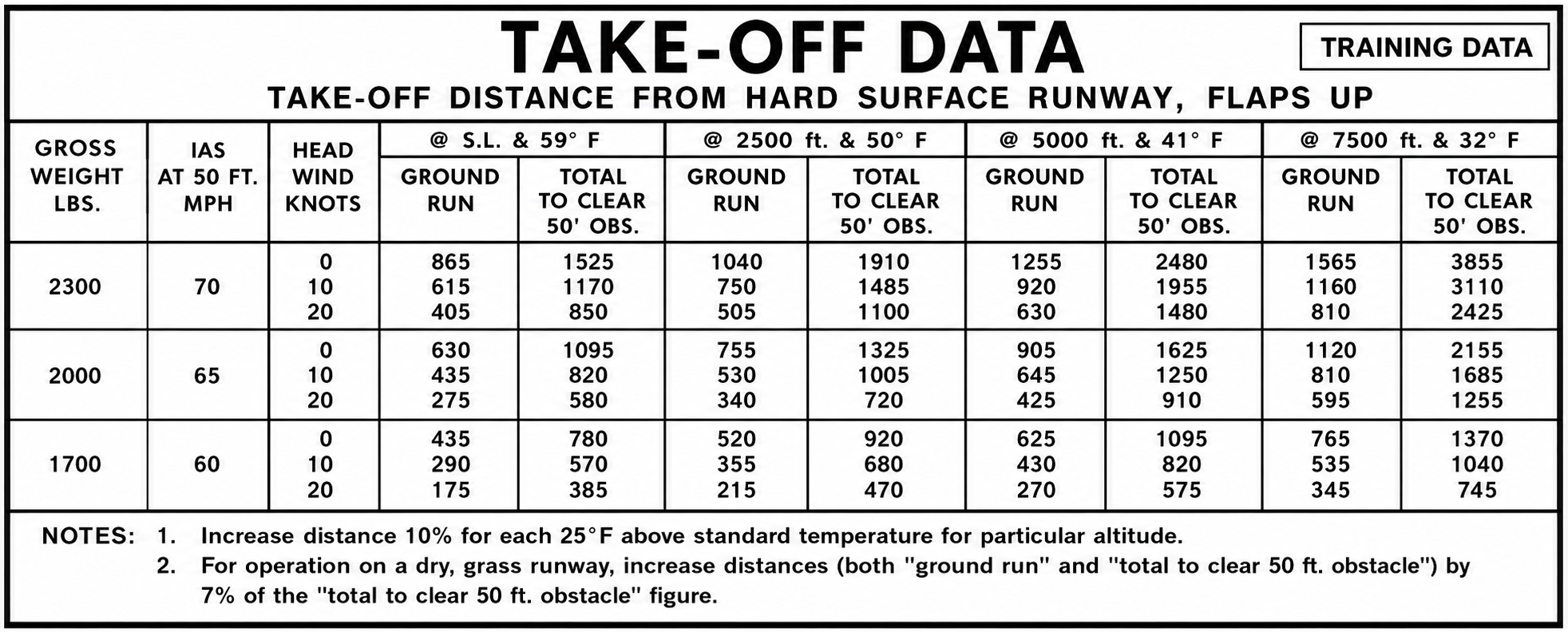
To calculate and determine our take-off and landing distances, we need the numbers from the pilot operating handbook (POH) of the plane. Hiere all numbers are described in the two phases of take-offs and landings:
For all of those calculations the numbers in the POH are the base numbers, or minimum required in best conditions based on the actual pressure altitude according to ISA and a selected temperature. On top of those numbers we add factors like described, which can look like these:
Take-off
| Penalty description | Increase basic required take‑off distance |
|---|---|
| Every 100 ft aerodrome elevation above AMSL | +1% |
| Every °C above OAT | +1% |
| Headwind (per knot) | −1% |
| Tailwind (per knot) | +20% |
| Runway slope (uphill, per 1%) | ≥ 5% |
| Grass runway – dry | +25% |
| Grass runway – wet | +30% |
| Soft ground | ≥ 25% |
| Snow | ≥ 25% |
| Gravel | +7% |
| Flapless take-off | +60% |
| Generic take-off penalty (Always applies) | +25% |
This prevents discovering at 45 knots that the runway is too short. Worst‑case thinking is essential.
Landing
| Penalty description | Increase basic required landing distance |
|---|---|
| Every 100 ft aerodrome elevation above AMSL | +0.5% |
| Every °C above OAT | +0.5% |
| Headwind (per knot) | −1% |
| Tailwind (per knot) | +20% |
| Runway slope (downhill, per 1%) | ≥ 5% |
| Grass runway – dry | +30% |
| Grass runway – wet | +38% |
| Soft ground | ≥ 25% |
| Snow | ≥ 25% |
| Gravel | +7% |
| Flapless landing | +60% |
| Generic landing penalty (Always applies) | +43% |
As we can see, much factors can determine the distances and basic required is almost never possible. However, these are summed up easily and including all factors while POH’s will offer you tables like these:
A skill we need to posess is calculating take-off distances using these graphs. An example can be found here:
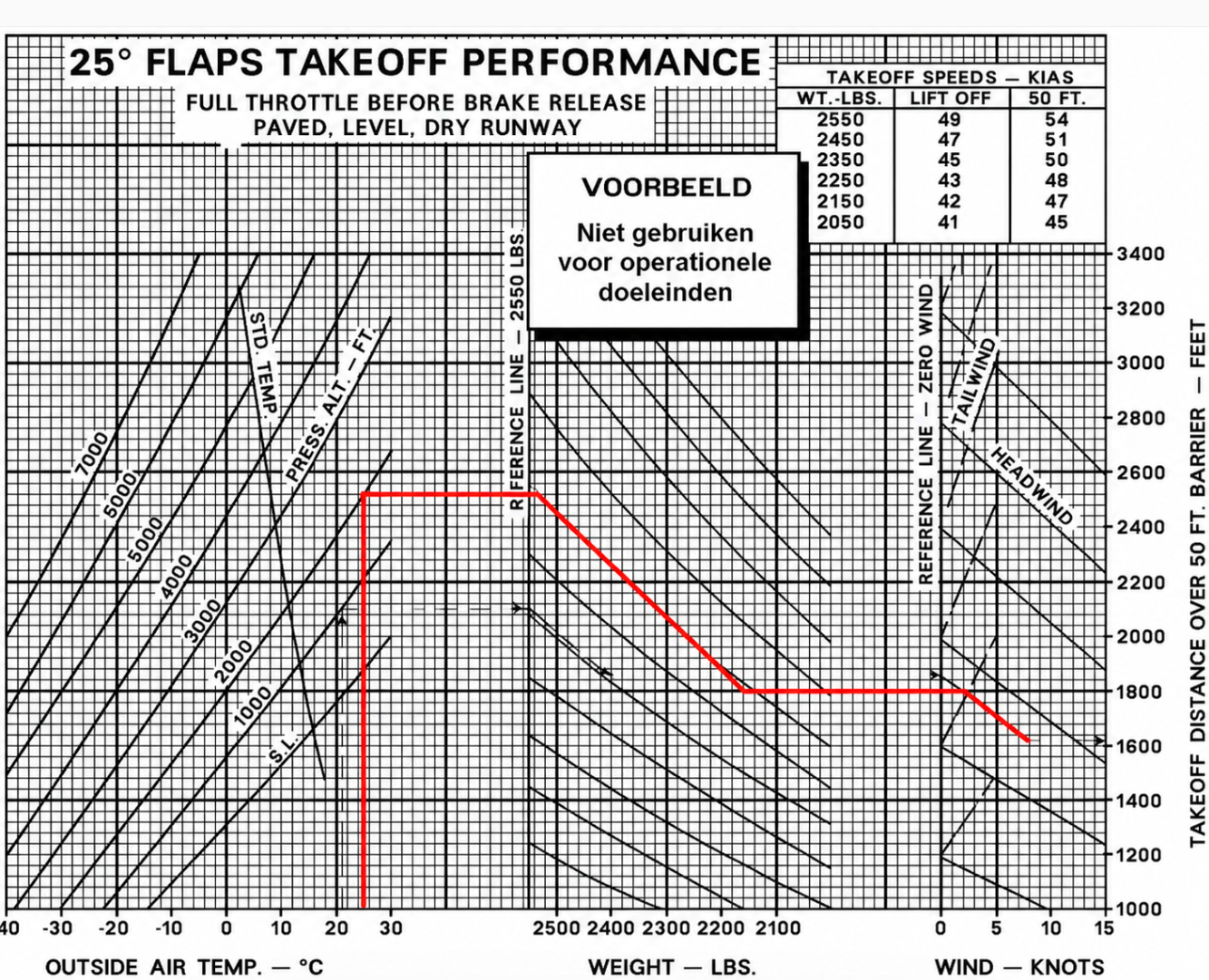
The variables used are:
We start at the left, co-relating the temperature to the pressure altitude. This corrects the pressure altitude to the actual outside temperature (hey the Density altitude). Then we shift from there in a straight line to the weight coloumn. We pick the first line there and follow that to the actual weight. Then from that weight we set a straight line to the wind component. As we have 5 knots headwind, our take-off distance will be decreased so the line has to go down. We join the first downward line to take some margin into account, leaving us with a total take-off distance of 1640ft which is 500 meters.
You can also parralel the lines but this approach gives us some extra margin.
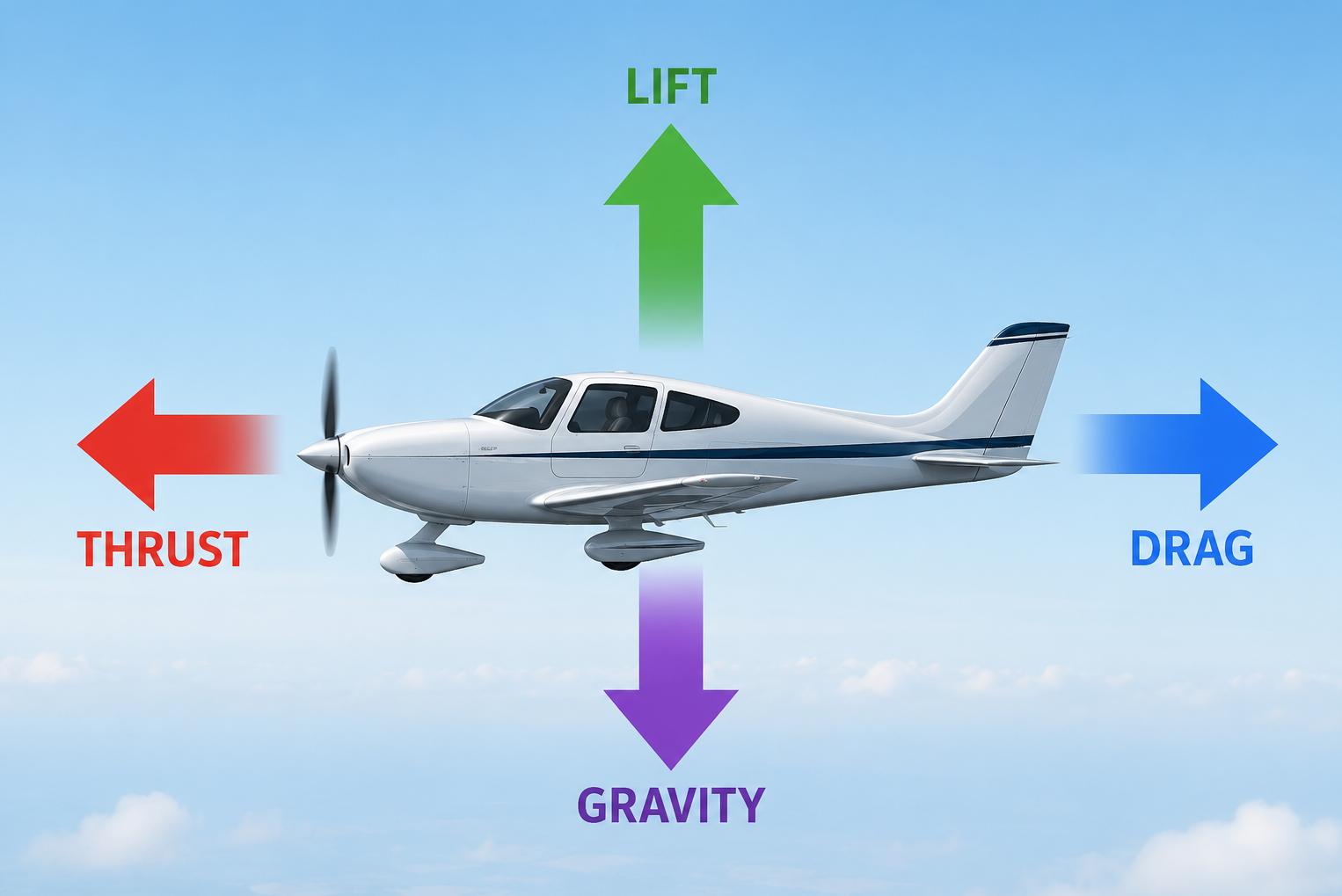
During the cruise phase, which means we are flying horizontal and level flight with constant speed, all forces of flight are in balance:
Added to these forces is the first law of Newton, stating that an item which contains no net force, will be still or in a one-pairing movement.
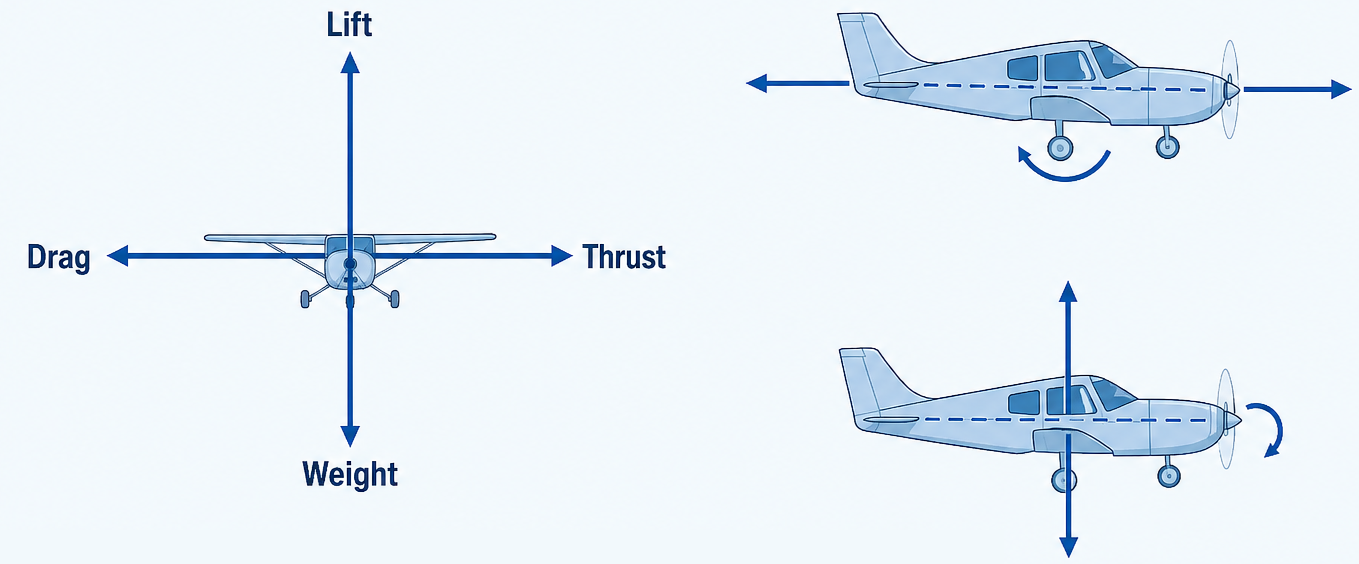
Lift and weight have different application points. Lift on the pressure point of the wings and weight on the center of gravity. However, lift and weight are a pair of forces, causing the plane to be nose-heavy. This pair is compensated by the tail-heavy pair thrust and drag. The sum of the force-pair must be 0, which results in a horizontal and level flight. However in practice, there is not a complete balance between the forces. The remaining pair is compensated by the horizontal stabilizer.
To determine flight performances we have multiple definitions available which all have their own meaning:
The cruising performance of an aircraft is determined by factors like:
The wind will only affect the range, not the duration of the flight. As we know the E6B flight computer by now, we now that when wind comes from behind, the wind helps us get to the destination faster and headwind will slow us down:
If we want to fly max range, we must fly with tailwind. This brings us further on the chart. If flying both A–B and B–A routes, the negative effect of headwind is greater than the positive effect of tailwind.
Flaps increase the parasite drag and require more engine RPM, decreasing the range and endurance. We mostly will not use flaps in cruising conditions.
The weight and balance will influence the endurance and range in their own ways:
At higher altitudes, we have less air density. However, we need more engine RPM to fly with less air density. Less air density also means less air molecules hitting your wings and less lifting force. We must have more true airspeed (TAS) to compensate for this and this will cost more engine RPM.
To make a navigation-plan we must calculate the needed fuel consumption including cruise speeds in TAS. In the POH of the aircraft you can find tables, telling you exactly the fuel consumption in different scenarios which you can use for the calculation.
The biggest factors are:
Then we reference the tables in the POH for the actual numbers. Some general rules and guidelines to use these tables for your calculations:
For Fixed-pitch propellor planes like the Cessna 172, this table looks like this:
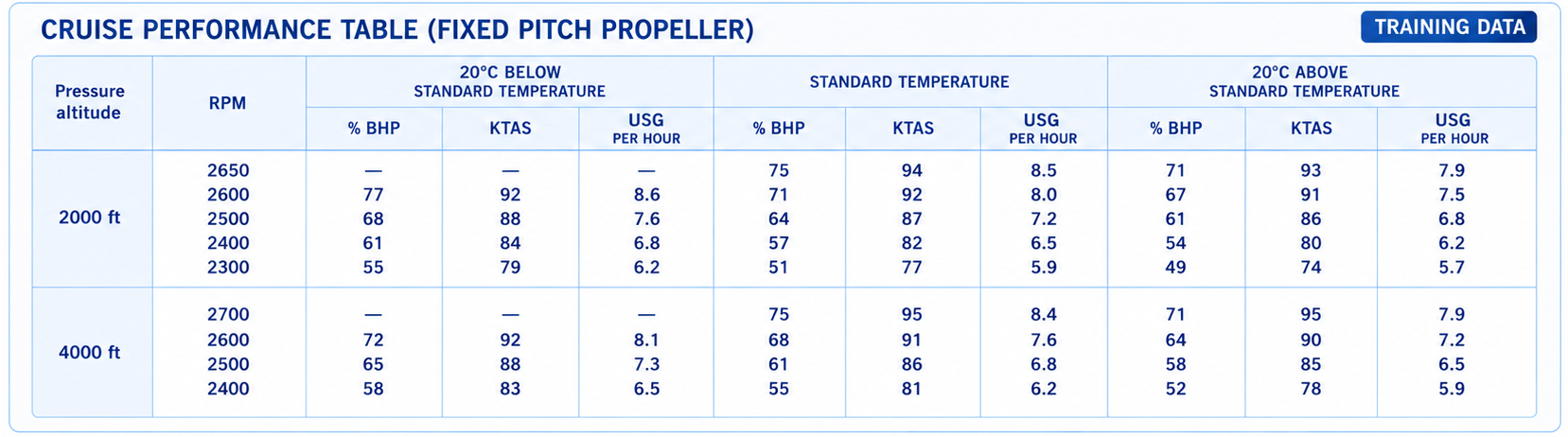
Let’s dive deeper into how to use this table for your fuel caulculation:
Pressure altitude: 3000ft
Temperature: 18 degrees celsius
Engine RPM: 2500
Time: 2 hour and 10 minutes (130 minutes)
We pick 7 USG/h according to the table, which is the in between for 2000ft 7,2 USG/h and 4000ft 6,8 USG/h. As the fuel cosumption gets less with higher temperatures, I stick with 15 degrees for ease and to calculate the worse numbers. Then we calculate the usage per minute to multiple it with the amount of minutes:
7 USG/h : 60 minutes/h x 130 minutes cruise time = 15,16 USG fuel usage in 2 hour and 10 minutes in these conditions.
For Constant speed propellor planes like the Cessna 208 Grand Caravan, this table looks like this:
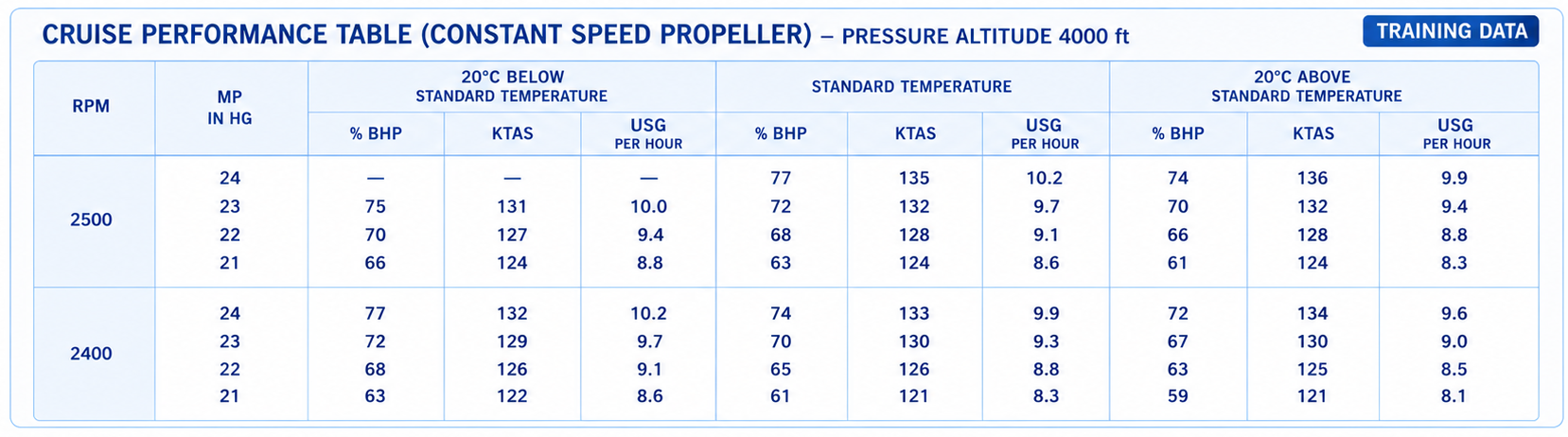
Let’s dive deeper into how to use this table for your fuel caulculation:
Pressure altitude: 4000ft
Temperature: 7 degrees celsius
Engine RPM: 2400
Manifold Pressure (MP): 22 inHg
Time: 1 hour and 50 minutes (110 minutes)
We pick 8,92 USG/h according to the table at the standard/ISA section The difference between ISA’s 8,8 and 20 degrees less is 0,3 USG/h, so let’s pick 0,3 and divide it with 20 to get the USG difference per degree. Then we multiply this with 8 for our actual temperature deviation, meaning we need to add 0,12 USG/h to our ISA hourly usage (8,8 + 0,12 = 8,92). Then we calculate the usage per minute to multiply it with the amount of minutes:
8,92 USG/h : 60 minutes/h x 110 minutes cruise time = 16,35 USG fuel usage in 1 hour and 50 minutes in these conditions.
You see, sometimes we must interpolate the numbers on the scale or pick the worse numbers for the overview.
During a straight climbing flight with a constant speed, we have a balance in forces. The weight of the plane is always vertically pointed to the middle point of the earth. The lift-force always points perpendicular to the incoming air flow and up into the air. Higher pitch also means a tilted lift force.
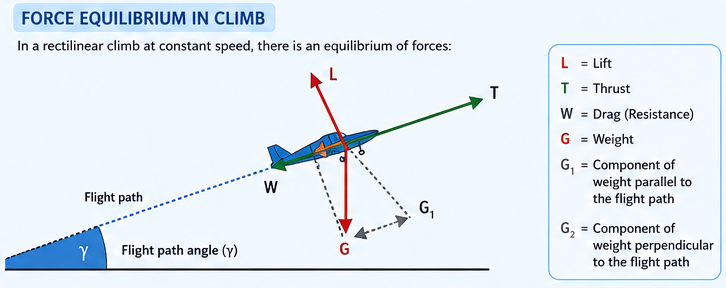
In climbing flights we have a split into two weight components:
During climb the lift is smaller than the weight, because G1 is less than G. This lift shortage is compensated due to the thrust is slightly upward, adding a vertical component. This added upward component results in needing some less lift.
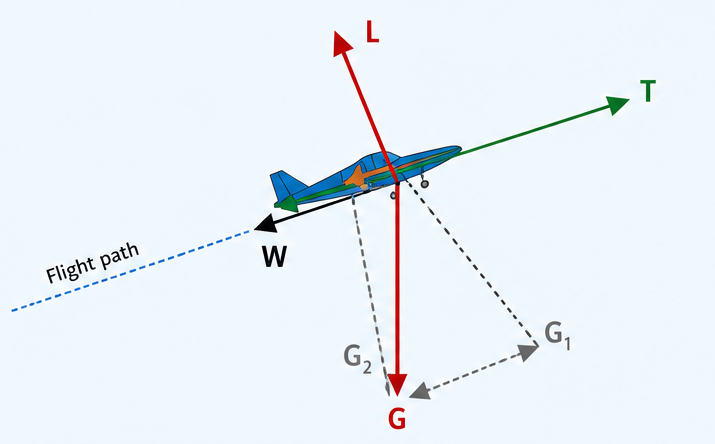
The thrust factor must not only compensate the drag but also a part of the weight. The weight also go a component on the longitudal axis in the same direction of the drag force.
The performance must be determined according to two criteria:
The climbing angle can be calculated with this formula:
sin = thrust - drag : weight
The climb angle is so the difference between thrust/drag and the weight. We also can determine the angle of climb in two different ways:
With no winds these two numbers are equal, but with a lot of headwind, the flight path angle becomes smaller meaning a steeper flight path. With tailwind, this angle will be more flattened.
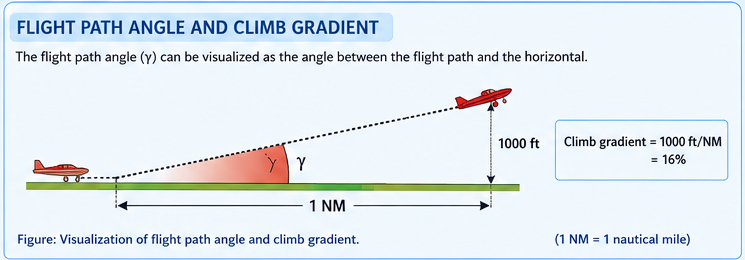
The climb gradient is the transition of the climb seen over a certain distance, like over a nautical mile. If we climb 1000ft per nautical mile (6076ft), we climbed 16% of a nautical mile in a minute. (1000 ft / 6076 ft × 100 = 16,46%)
The climbing speed/rate of climb is the vertical speed of a plane. This means as this is 1000ft, we will be 1000ft higher if maintaining that vertical speed for a minute.
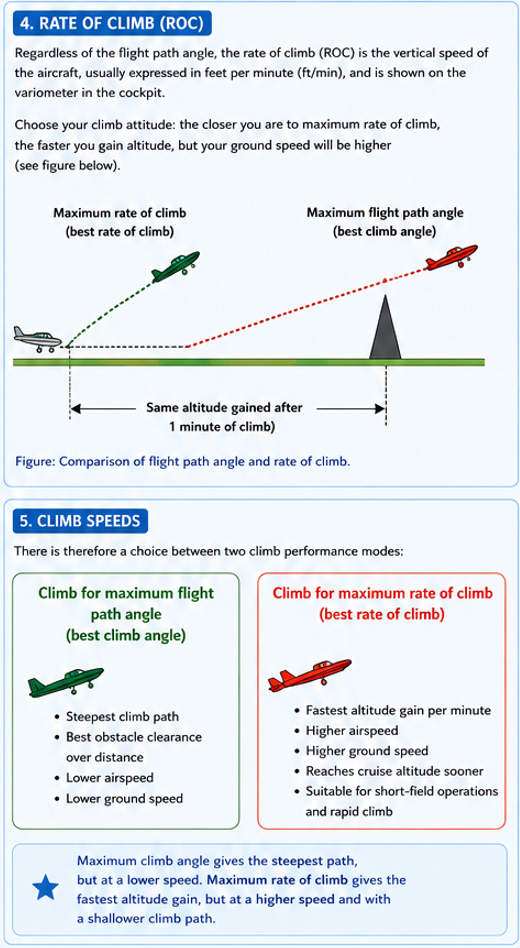
Green: Vx speedRed: Vy speed
The climb angle and rate of climb doesnt have static values but are determined by these factors:
Let’s describe them all.
The air density is determined by air pressure and temperature, as we already know by now.
The engine and propellor will perform worse with lower air pressure, as there are less air molecules to move and use to fly through. We also generate less lift, needing a higher AoA to maintain a certain amount of lift. Just enough to counteract our weight.
When climbing, we eventually hit a upper altitude limit of the plane. At that point, we climbed so much that the aircraft structure cannot generate more lift and thrust to get higher. For a Cessna 172 this is around 13.000ft. We know two certain limits:
These numbers are the result you can read on the vertical speed indicator when close to the limits. As we can almost never hit the actual ceiling, the practical ceiling is also the service ceiling described in the POH of the aircraft.
As we also already know, more weight means we need to generate more lift which therefore means more induced drag. This results in a lower rate of climb. When the plane becomes lighter after burning some fuel, the climb performance will be better.
Flaps and an extended landing gear will increase the parasite drag of the plane, which then will result in a slower rate of climb and a higher engine RPM.
Winds will influence the flight path angle and the climb gradient:
The wind only does change the speed opposing the ground, and as we can travel more or less distance to the ground, the gradient will be different.
As we bank, the lift vector will also tilt, needing more lift. In turns we will use some back pressure on the yoke to counteract this. In turns with a constant speed, you will notice a speed drop as result of extra drag. In climbing turns we use a limit of 15 degrees which is a nice compromise between climb speed, loss of some lift and turn speed.
The forces of flight while descending are somewhat similar to climbing but then reversed. The gravity (G2) force gets a little thrust component and helping us to gain speed. This is why we descend with almost no power. During descends, the lift force ia slo a lot smaller because the negative AoA.
The forces while gliding, so with zero engine power, are slightly the same as descending, but we don’t have a small thrust power left. We have only some thrust left in the form of weight. This is why we sometimes call:
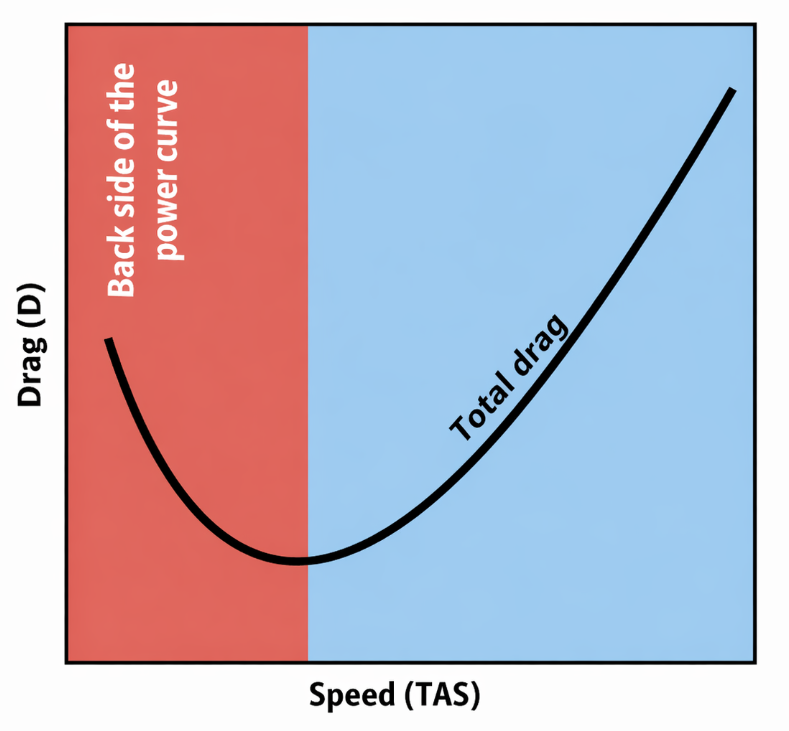
During gliding flights, in most cases during an engine failure, we have two parameters to measure the gliding performance:
In practice, we must immediately pitch to gain and maintain our best glide speed: Vbg. In a Cessna 172 this is around 65-68 knots. The point of minimum drag and most lift, the bottom part of the total drag curve. We want to keep as much options possible and therefore increasing the gliding distance is crucial for the options to land our aircraft. Maintaining the Vbg speed means that we have the smallest gliding angle opposing the ground.
The factors which can influence our glide flight are:
Winds are very important when aiming for the highest gliding distance. We want to get tailwind, so we take advantage of the wind gaining more distance. When we actually want to land, then headwind is more favorable.
Headwind: Decreases glide distance
Tailwind: Increases glide distance
Flaps and the landing gear will increase the parasite drag of the plane. Keeping those extended will therefore decrease our gliding distance significantly. We need to keep these retracted as long as possible.
The smallest gliding angle will be reached while maintaining one certain AoA, the one with the maximum L/D ratio. The angle however says nothing about the speed. More weight means an increase in the Vbg (best glide speed). A heavier plane therefore keeps a higher airspeed, meaning in reaching the surface faster.
You have reached the end of the page. You can navigate through other blog posts as well, share this post on X, LinkedIn and Reddit or return to the blog posts collection page. Thank you for visiting this post.
If you think something is wrong with this post or you want to know more, you can send me a message to one of my social profiles at: https://justinverstijnen.nl/about/
If you find this page and blog very useful and you want to leave a donation, you can use the button below to buy me a beer. Hosting and maintaining a website takes a lot of time and money. Thank you in advance and cheers :)
The terms and conditions apply to this post.
For a live overview of my flight lessons, visit: https://flighttools.justinverstijnen.nl/flightlessontracker
This page can contain a collection of personal notes, steps to remember, finished and unfinished content. Please excuse brevity.
Do not use specific information given like fuel flow, landing/take-off distances for your flights. Always refer to the POH of your exact plane for flight preparation. My information is just for references that I used.
The air is best described as “thin water”. We humanity live on the floor of the air-ocean.
The atmosphere is the layer around the earth, which is around 100 to 200km from the ground up. Worldwide, we use the International Standard Atmosphere which is a mean set of conditions which will be somewhat different depending on the weather conditions, location etc. This is a mean of the conditions at 45 degrees north latitude.
In the standard atmosphere, we use these characteristics:
This is a set of conditions, but some numbers can defer in the real world, due to the location or different seasons. Now, lets take a look at the different layers in our atmosphere:
| Layer | Altitude | Characterstics | Temperature gradient (ISA) |
| Thermosphere | 280.000ft and up 85km and up | Thin air and high temperature due to solar radiation. Auroras happen in this layer | Increases with altitude |
| Mesosphere | 160.000ft - 280.000ft 50km - 85km | Meteors burn up in this layer, coldest layer | 0c to -90c |
| Stratosphere | 36.000ft - 160.000ft 11km - 50km | Contains the ozone layer, stable air with some jet streams at the bottom | -56,5c to 0c |
| Troposphere | 0 - 36.000ft 0 - 11km | Bottom layer at the ground of earth and where weather/clouds take place | 15c to -56,5c |
This is a repeat of the information already learned in the Meteorology course. For more information, check out
Air pressure is a result of the mass/weight of the air. Because there is so much air above the earth which compresses close to the ground, areas with a lot of air molecues will be created. You can see this as a tower of jenga you played before. The weight of all the bricks pushes on the lower layers of bricks.
On earth we have several high pressure areas and low pressure areas which are an result of temperature differences. High pressure areas always wants to go to low pressure areas, just like when you pump up a tire and let go the vent. The air from the high pressure area inside the tyre will go to the outside, low pressure area.
So air pressure actually indicates the volume of air molecules in the area. The higher the pressure, the higher the volume of air molecules.
High pressure (H) and low pressure (L) areas are not absolute numbers, but relative to each other. For example:
When going up into the air, the air pressure will decrease like seen in the graphic below:
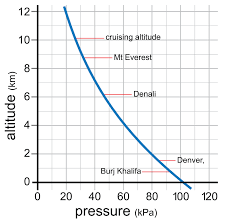
For reference, we will use this numbers:
As this is an exponential relationship, this will guide you through the first 10.000ft (3,048km) in altitude, after that this trick does not longer work correctly of course. Some good rules of thumb:
For more information about Pressure and Density altitude, check out: https://flightblog.justinverstijnen.nl/ppl-theory-nav/
Pressure altitude is the altitude corrected to the International Standard Atmosphere, namely 1013 hPa (which is also called QNE). For performing take-off calculations, we will want to know how our plane performs which can be different with different pressures. This is a live indicator of being above or below earth’s standard atmosphere.
In short:
In an airport which mostly is lower or higher than mean sea level, there will be a small correction needed. For example, our airport is at 17 feet above sea level, and the actual pressure is 1032 hPa on sea level at a day with nice weather, the pressure altitude is -489 ft. This means our take-off performance will be better as we have more air molecules which is better for our engine.
In the same example with a pressure of 968 hPa on sea level, we will have a pressure altitude of 1238ft. This means our aircraft will perform as it takes off at 1238ft above sea level, which will have some disadvantages. As there is less air, we will need a longer runway, our engine performance is less and our lift will be less as there is less air. However, flying in relative high pressure altitudes is good for having speed, as drag decreases in lower pressure.
As you can already see, this example gives two completely different scenario’s with around 1700ft difference. In countries like the USA where airstrips can be at 5000ft altitude, the pressure can be a huge difference which we must take into account.
Check out this tool to calculate and visiualize Pressure/Density altitude: https://flighttools.justinverstijnen.nl/pressuredensityaltitudecalculator
Now we know the pressure altitude, we need to correct it for Density altitude, because warmer air is thinner than colder air. This is because warmer air expands, just take a look at a hot air balloon. This means that on 5000ft pressure altitude and on a hot day of 35 degrees, the density altitude (also known as “performance altitude”) will be almost 9000ft. So we can expect our plane to behave as it is on 9000ft in normal ISA conditions.
Thinner air means less oxygen and less air molecules, denser air means more air for lift for both propellor and the wings. Less oxygen also means less engine performance but a higher true airspeed due of less resistance from air molecules.
To calculate the density altitude from pressure altude, you can use the E6B or the tool below:
Check out this tool to calculate and visiualize Pressure/Density altitude: https://flighttools.justinverstijnen.nl/pressuredensityaltitudecalculator
Tip: Use an E6B calculator for a quick and thorough calculation of Density altitude based on the outside air temperature (OAT) and pressure altitude.
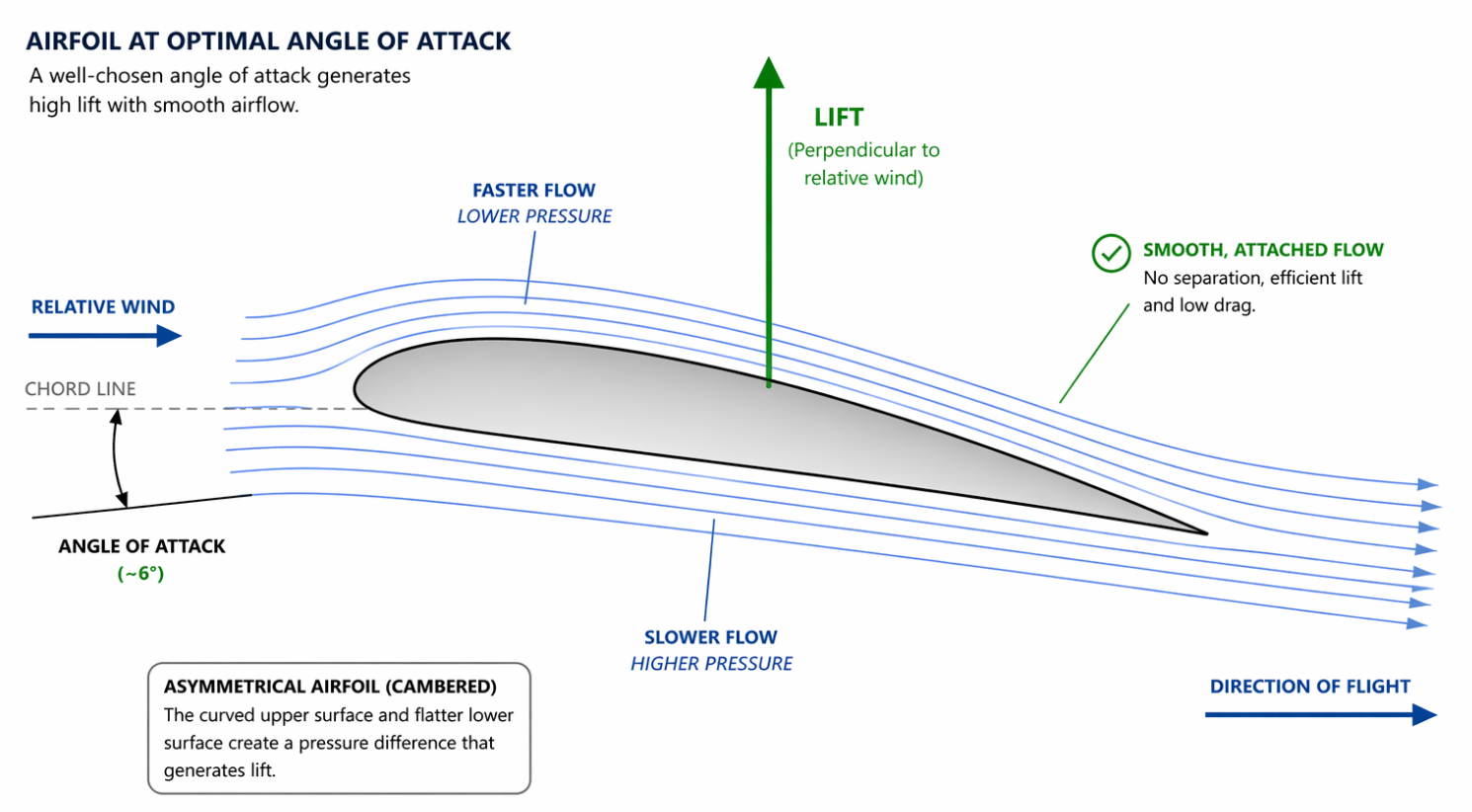
Lift (draagkracht in Dutch) is a component that keeps a plane in the air. This is the upward force that fights the gravity/weight of the plane. It works basically as the wind flows over and under the wing. As the air over the wing goes faster and under goes slower, it will combine at the end of the wing. Lift is also the component that will compensate for the weight of an aircraft (gravity). This means, how more heavy the plane is, the more lift it needs to produce to fly.
The two primary causes of lift are:
We can explain the air pressure differences induced by lift because of 2 elementary laws:
| Law | Definition | Formula |
|---|---|---|
| The continuity law | A conserved quantity cannot disappear or appear spontaneously; it can only move from one place to another.In fluid flow, this means the amount of mass entering a system must equal the amount leaving it, as long as nothing is added or removed inside. That is why a fluid flows faster when it passes through a narrower section. | V₁ × A₁ = v₂ × a₂ |
| Bernoulli’s law | In a flowing fluid, an increase in speed is accompanied by a decrease in pressure, provided the flow is steady and friction losses are negligible.Bernoulli’s law explains how that increase in speed is related to a decrease in pressure. Compare this to pinching a garden hose. | Ptotal = Pstatic + Pdynamic = Constantp + 1/2 ρ V² = Constant |
Both laws describe that fluids (including air) in a narrow area will go faster and has a lower pressure. This helps us better understand how an aircraft flies.
Lift works basically with these 4 components:
Let’s take these 4 components into a simple drawing:
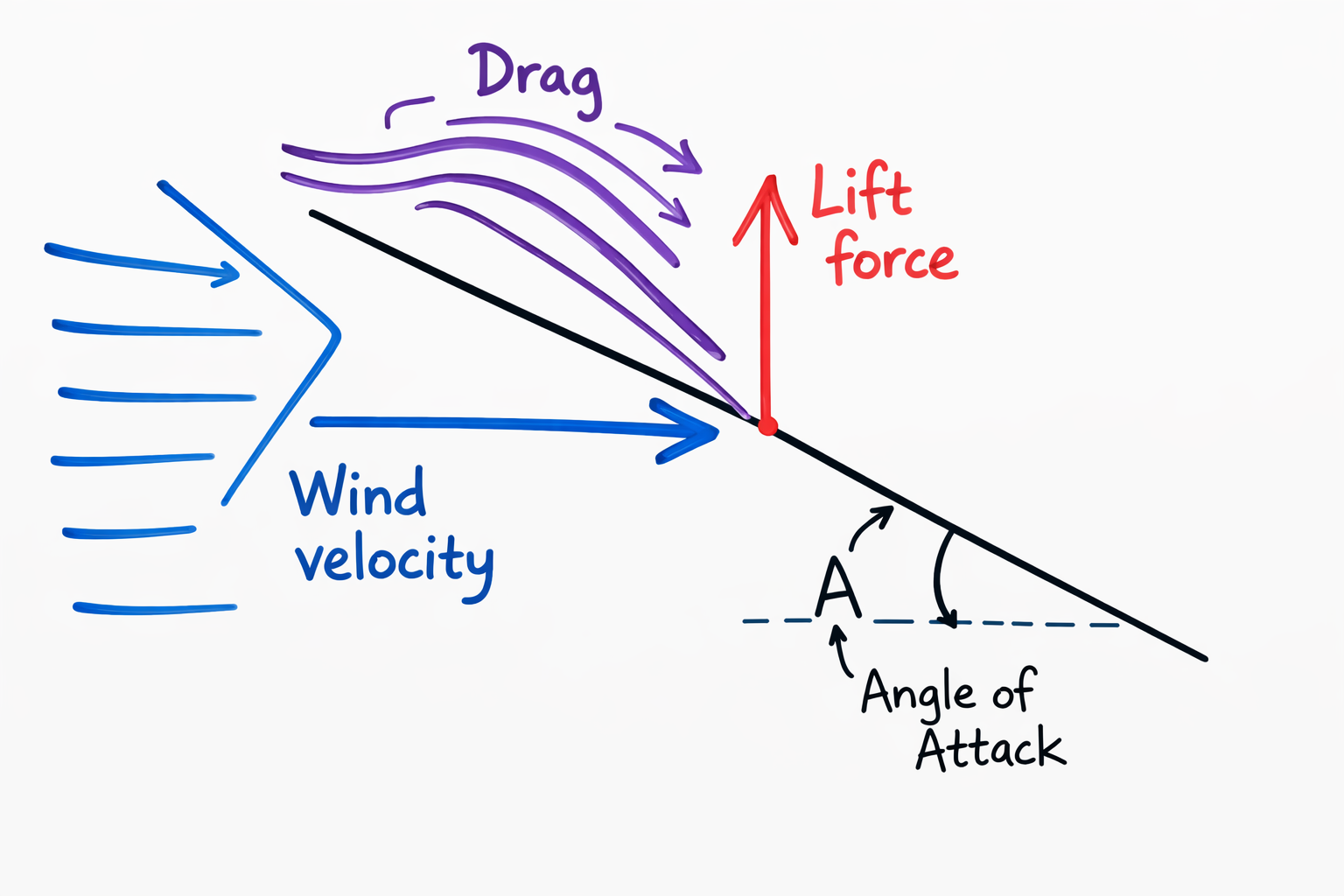
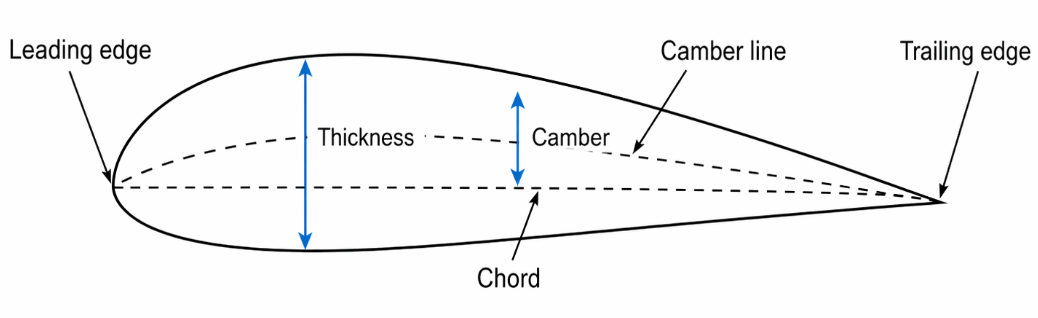
The black line represents the chord of the wing. This is the same with the outline of a wing:
We also have the resulting air-force, which is a line 90 degrees of the wing profile, based on the oncoming wind.
For the example of Static and Dynamic pressure, I will stick to the example of a garden hose, pinched. This results in two things:
Take a look at this drawing, which makes more sense:
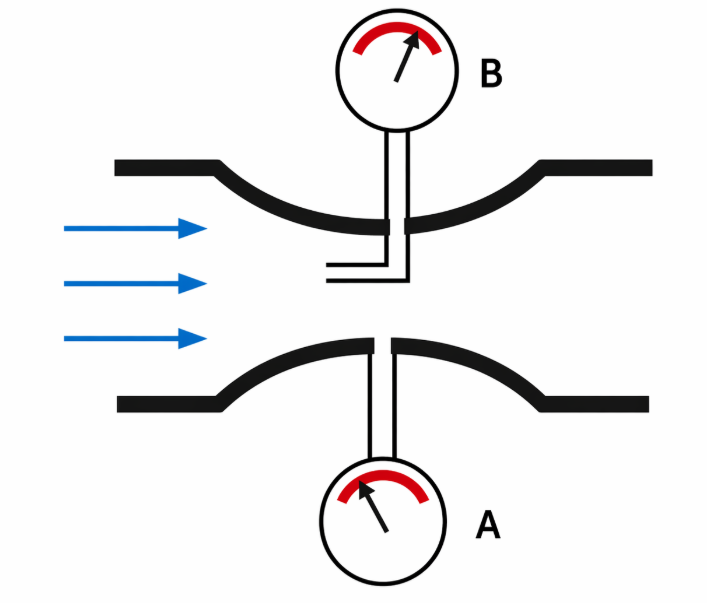
This basically works the same as the pitot-static system of an airplane, the static port measuring the static air pressure, as the pitot probe measures dynamic pressure. Inside of the measurement systems, there will be calculated the results which are Indicated Airspeed (IAS), Altitude and Vertical Speed (VS).
Dynamic pressure is measured with this formula:
This means:
Bernoulli’s law states that for example water or air going into a narrow space at a certain speed, will also come out of that narrow space with that certain speed.
The air will flow around a wing-profile. Because of the leading edge of the wing, the incoming air will divert up and down, bringing the flow-lines closer together.
Just like the two laws already predicted, the airflow will increase and the static pressure will decrease. At the leading edge of the wing, the lines will be closer together. Here the pressure is relatively low. Near the trailing edge of the wing, the flow lines will be less close. The speed of the airflow decreases and the pressure increases.
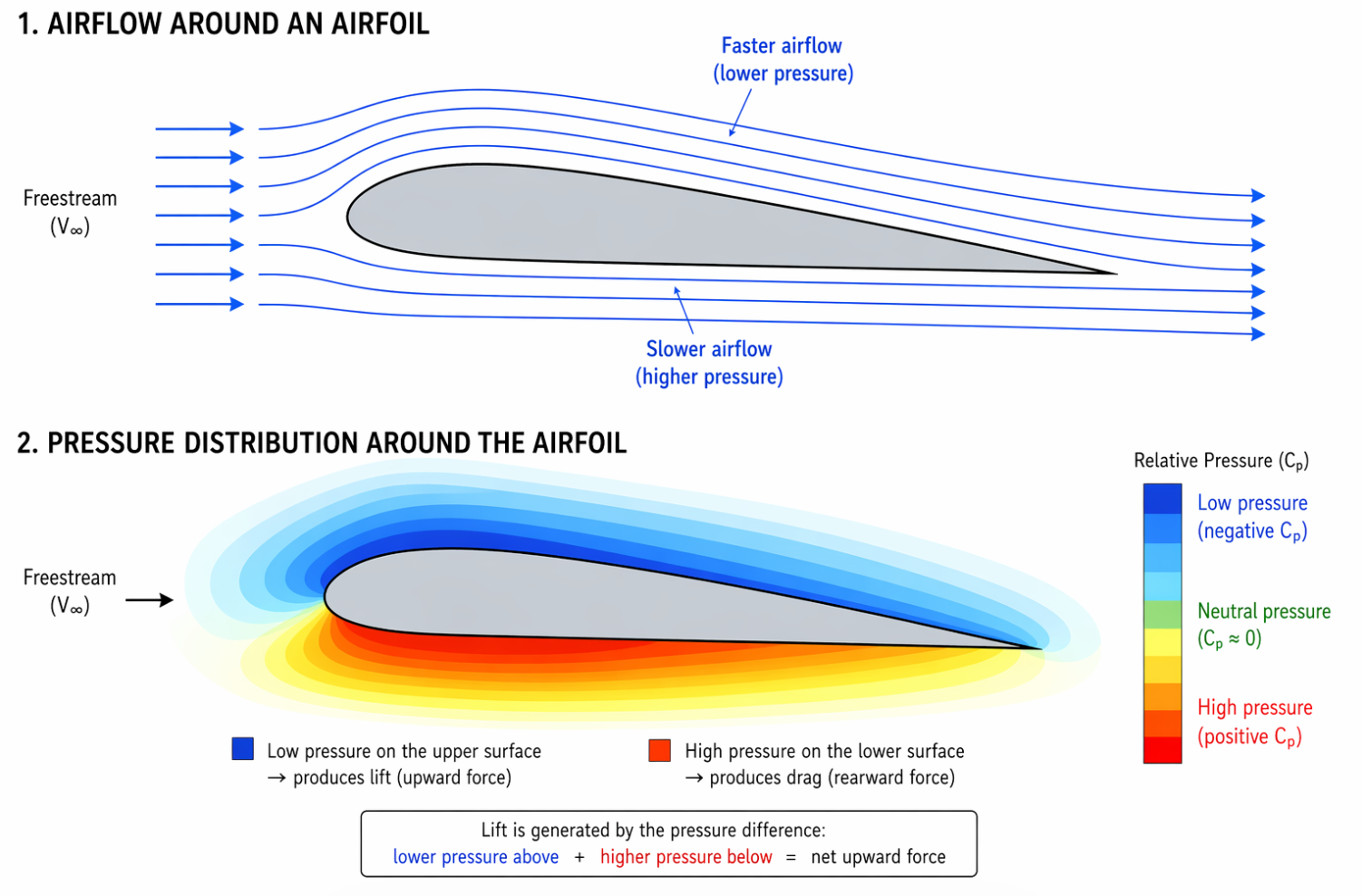
Under the wing, the airflow will have to make a smaller angle and path, causing the air to move at a slower speed but at an higher pressure.
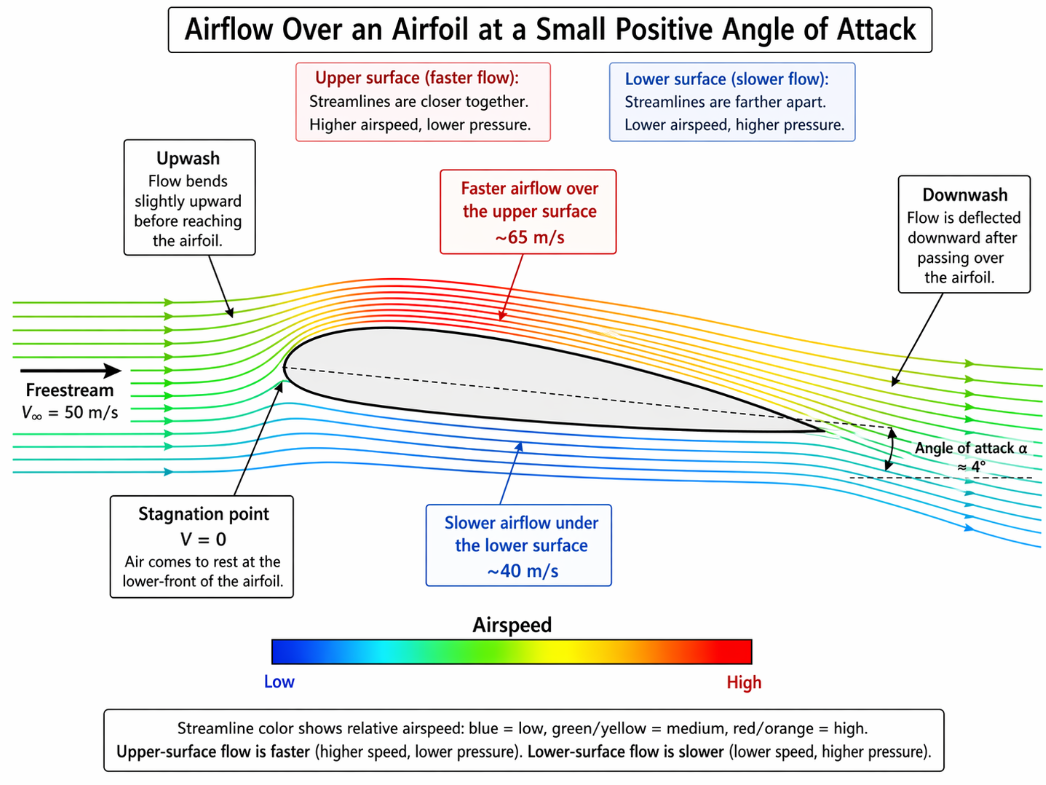
The upwash is an uplifting movement as result of the pressure differences. The leading edge of the wing needs to split the airflow. This point is called the “stagnation point”, the point of air coming to a small temporary stop and then leaded over or under the wing. In the picture below, you can see that the airspeed is 0 at the stagnation point.
The downwash is a descending movement of the airflow after it hit the wings. As Bernoulli’s law already stated, the dynamic pressure increases then the static pressure decreases, so the air above the wing goes at a faster speed.
Too see this all put into perspective, view this image:
A wing profile has various parts, which we will describe now:

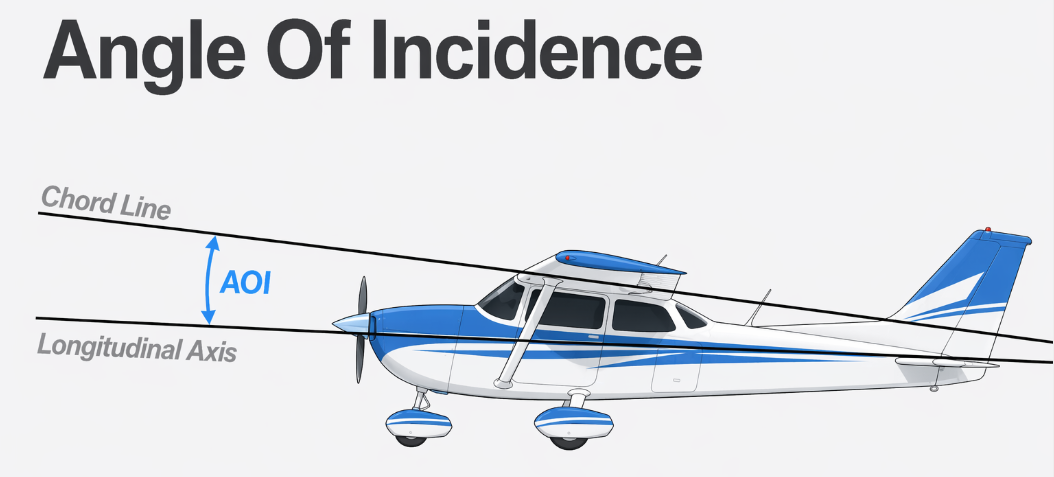
The angle of attack will often be reffered as “α”. It also is an result of sum angle of incidence, the pitch angle and the glide angle.
The glide angle (baanhoek in Dutch) is the angle between horizontal and the flight path. The flight path is the path the center of gravity flies through the air.
The lift formula is an outline of the resulting airforce on a wing profile. Lift is dependent on these 3 things:
The formula goes like this:
| 1/2 ρ V² | CL | Surface |
|---|---|---|
| The dynamic pressure of the incoming airflow (TAS) | Lift Coefficient | The surface of the wing |
So all these components work somewhat together to produce lift. This means the result of all must be positive, where one value can be less or more than another at certain parts of a flight. We will take a deeper look into the Lift components.
To better understand lift, we have some definitions to look at as these definitions will be used in more explainations later on.
| Definition | Definition (Dutch) | Explaination |
|---|---|---|
| Center of Pressure (CoP) | Drukpunt | This is the resulting force of the lift of the wing, which we can also call the center of lift |
| Stagnation Point | Stuwpunt | The point at the leading edge of the wing where the airflow is being separated and comes to a stop |
| Upwash | Opwaartse beweging | The ascending airflow after it hits the wing’s leading edge |
| Downwash | Neerwaartse beweging | The descending airflow after it left the wing’s trailing edge |
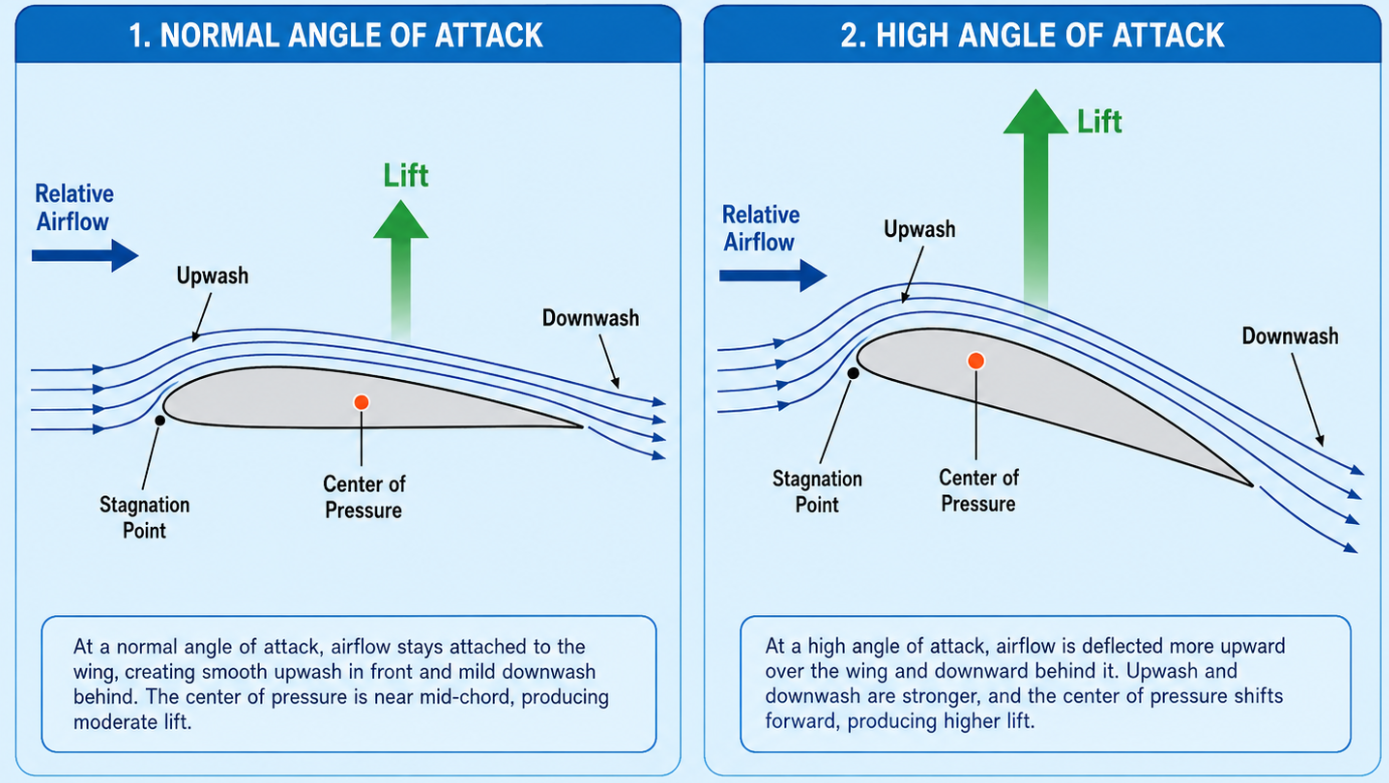
This picture does shows how these terms work in both cruise and high angle of attack situations.
The dynamic pressure is the pressure of the free airflow just before the wings. 1/2 ρ V² altogether is a sum of static and dynamic pressure, where V² means only the dynamic pressure. The V factor is equal to the True Airspeed. Headwind is also counted within this V factor, which means that the more headwind, the more lift.
Static pressure in this formula is also very important. This is directly dependent on the static air pressure in the air you fly in. The higher the static pressure, the more lift. This also means that if we climb with a plane to about 34.000ft where the air pressure is about 25% of the pressure on earths surface, you will need much more speed to retain a specific amount of lift.
The lift coefficient is a sum of the angle of attack, amount of lift and drag. In a graph, this looks like this:
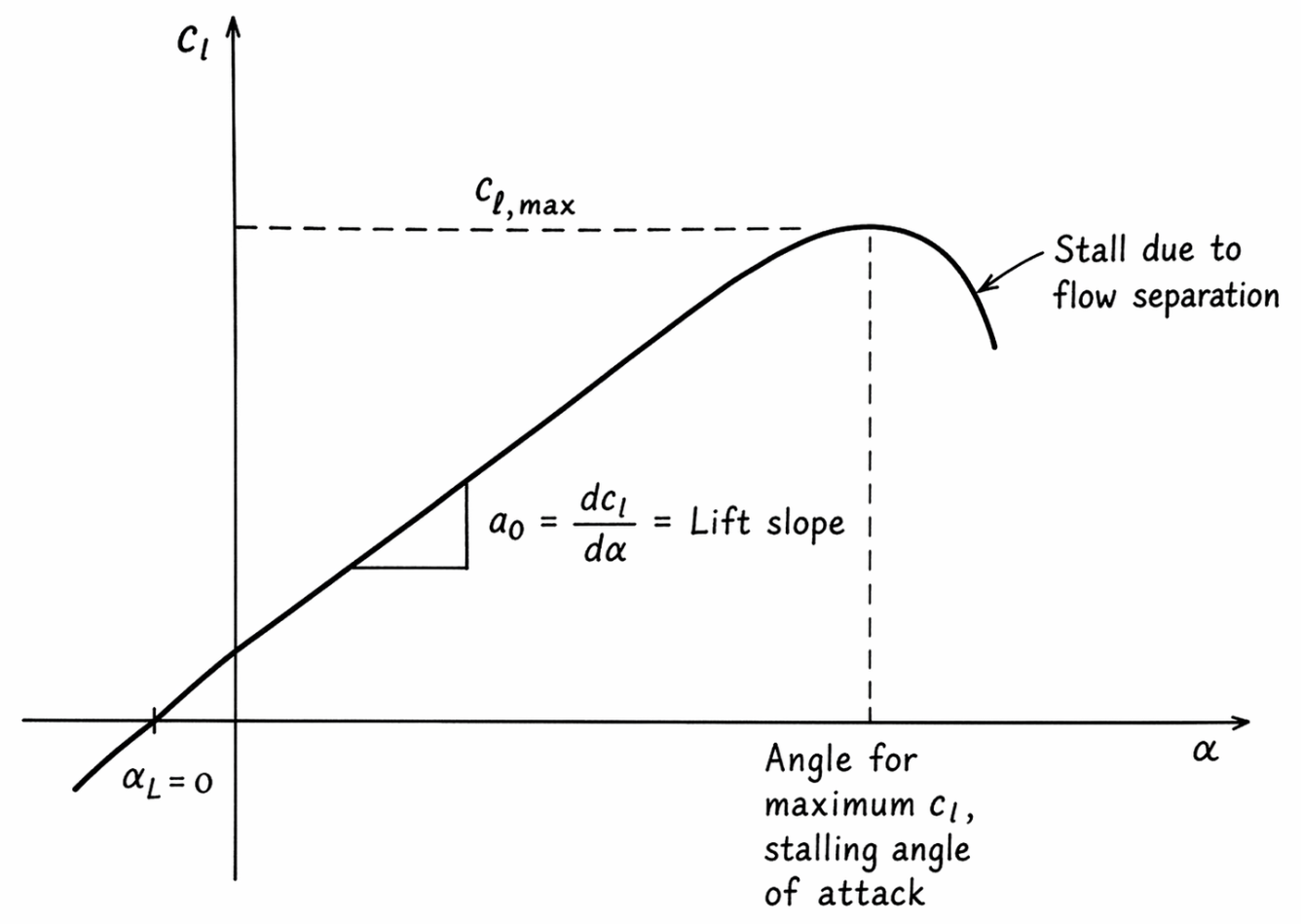
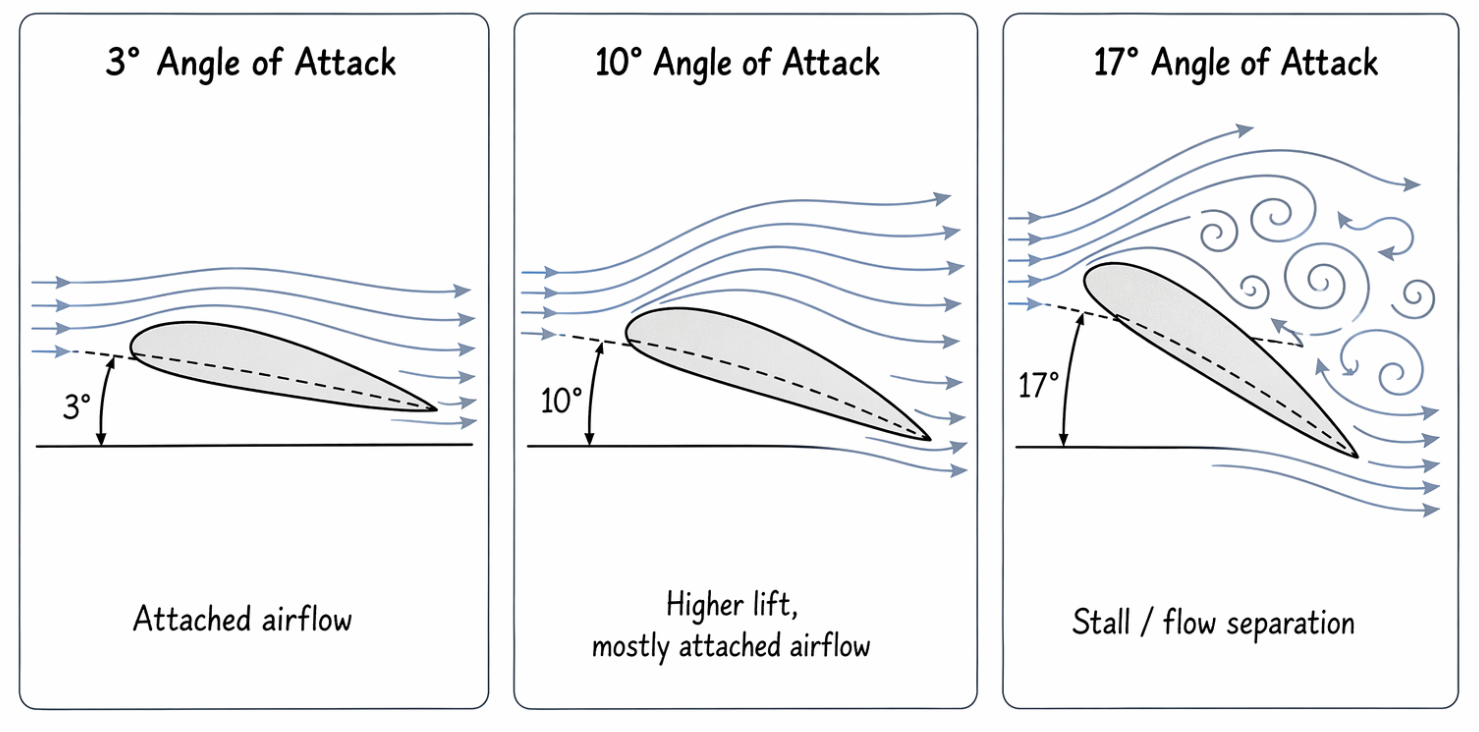
This graph outlines that the more angle of attack we have, the more lift. However, there is a bount that this stops which is called the critical angle of attack. In a Cessna 172, this is around 15-16 degrees nose up. Pulling even more on the yoke causes the plane to stall and dip from the sky. This can be very dangerous at lower altitudes.
A high angle of attack results in the air not gluing anymore to the wing but to transform into rotor flows. To get a better view of what exactly happens:
The wing surface is a factor that directly influences the lift of a plane. In the formula, this will be in the value square meters (m²).
How bigger a wings’ surface is, the more lift it can deliver. We can also do some things with our wings to produce even more lift as they increase the wing surface area. Think about:
We set flaps on take-off to produce more lift at a lower speed. This means we need less runway to take-off from. When landing, we use more flaps to create more drag and decrease the speed. Flaps help us in these parts of the flight to have more time, see the runway a lot better and to descend in a much steeper line.
Then in straight and level flight, there is a great connection between the speed and the lift coefficient. The lift equals the weight of the plane and the speed is higher than the amount of drag. However, if the angle of attack increases -> the lift coefficient will also increase. If preventing that the lift increases, the airspeed must be decreased.
This also means something for the lift coefficient and the angle of attack performances. For example, a symmetric wing profile will start with 0 lift coefficient. This gives it somewhat less lift than an asymmetric profile, as shown in this graph:
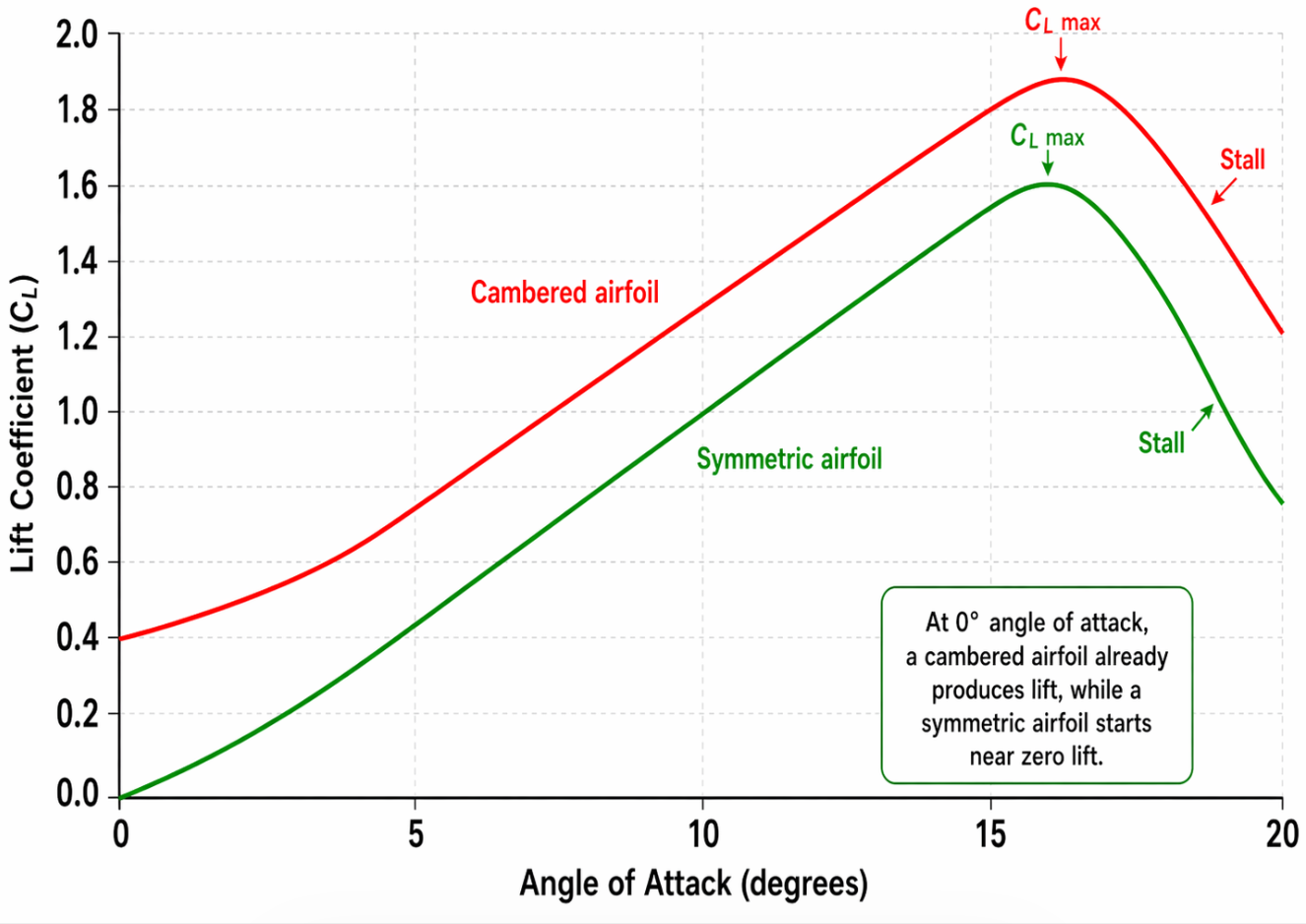
Here an asymmetric wing profiles will eventually reach a lift coefficient at a negative angle of attack.
The airflow over the wings looks like this in three-dimensional setting:
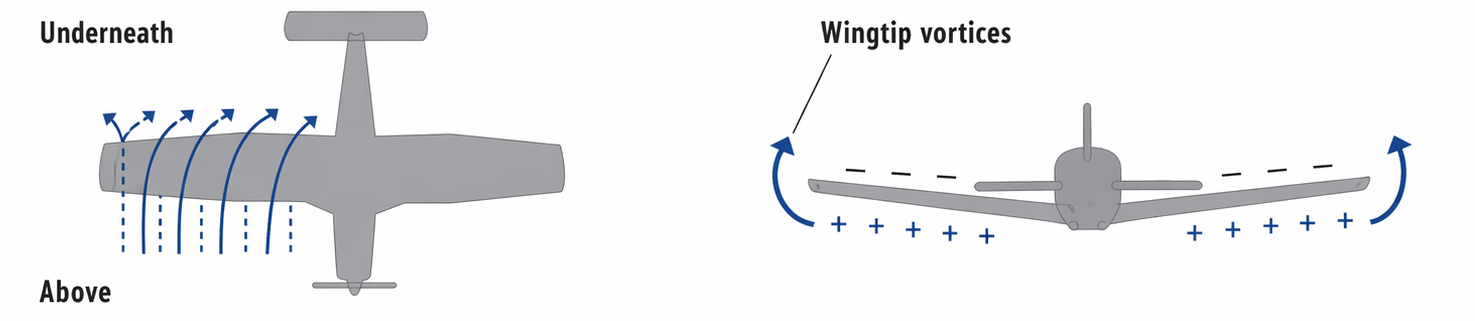
On the left, the airflow underneath and above the wing is illustrated and on the right we have the difference in pressure (Up = low and under = high). This difference in pressure will tend to flow to the wingtips. This movement actually causes the wake turbulence to happen. This movement however induces a decrease of lift and an increase of drag, induced drag, to be pronounced correctly.
Wake turbulence (zogturbulentie) is caused by lift, and will show as two opposing turning rotors behind the wingtips. This is an excellent example of Newtons third law in action, which states that for every action in the universe there is an opposing reaction. The force of the lift creates an reaction in the form of wake turbulence.
The reaction of two opposing wings will cause this wake turbulence. The strength of the wake turbulence is affected by the amount of lift the plane generates. A Boeing 777 will generate lots of lift to fight its huge mass compared to a Cessna 172 and so generates more wake turbulence.

A good advice is if taking of behind an airliner, to wait for at least 3 minutes for the wake turbulence to completely dissipate. Heavy wake turbulence can cause huge problems as the airflow for light planes will be disrupted.
I found a great video explaining the effects of wake turbulence and wingtip vortices here.
Some other facts:
The greatest risks of wake-turbulence are:
The shape of an wing from the top view is called the wing shape. We have mostly two types of wing shapes:
These wings also have some more properties:
The distance of the wing leading edge to the trailing edge is called the chord as we already saw. Sometimes this chord is not a straight line. We then speak of a mean chord.
We can calculate the wing aspect-ratio using this formula:
Aspect ratio = Wingspan divided by (/) the mean chord.
Now the aspect ratio also helps producing lift. The higher this ratio, the more steep the lift-curve is. Take a look at this graph:
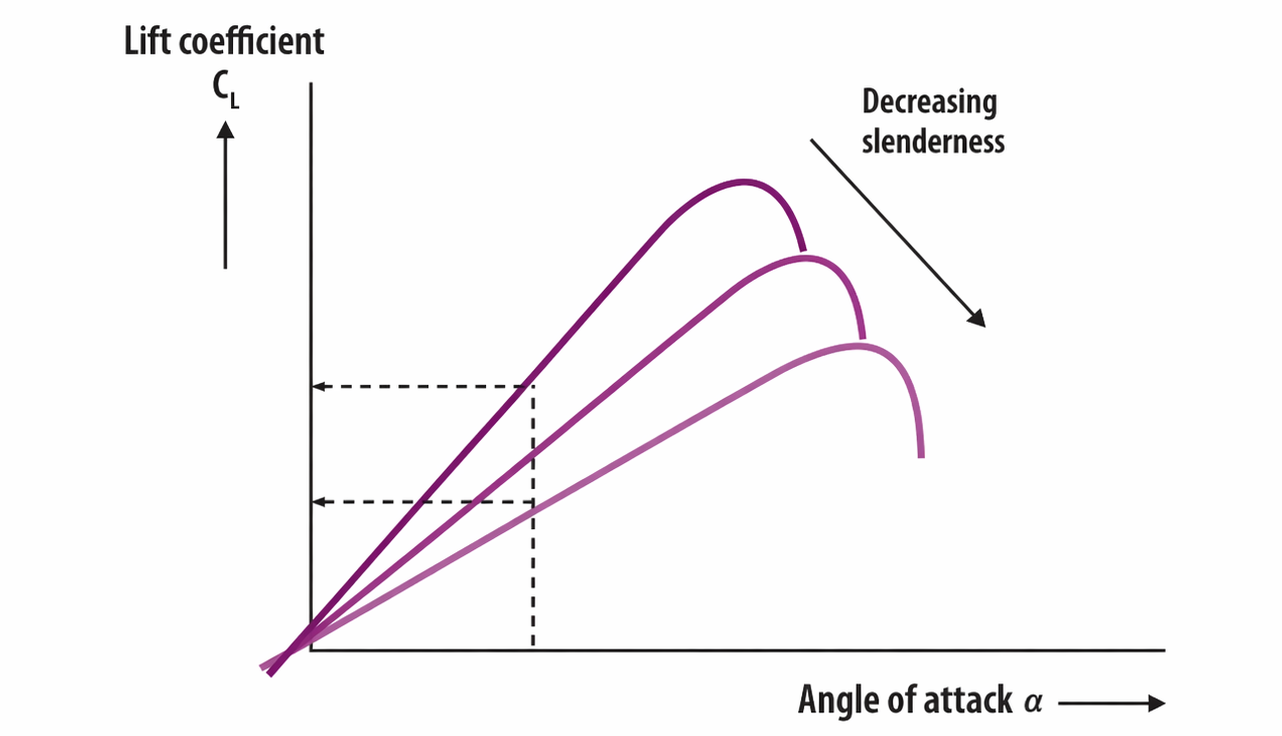
For reference, here a glider plane as a much steeper line than a fighter jet. This is like we already discussed, a result of the wingspan divided by the mean chord.
The wing surface is the total surface area of a wing. We calculate also the part above the fuselage, and is called the gross surface.
Drag (weerstand) is the resistance of the air a plane flies through. Oncoming wind slams into the cockpit, leading edge wings and wheels and this partly slows us down. More information about this component will be discussed further in this module.
We can feel drag especially when on a bike and going really fast (25-30 km/h or higher). You feel alot of upcoming air which slows you down. This is the exact same on a plane.
To let an aircraft actually fly, the thrust component of the engine must be higher than the total drag at all times. In an horizontal flight, the amount of drag is equal to the amount of thrust, bringing you forward in a constant speed.
The drag formula is similar to the already discussed lift formula, and looks like this:
| 1/2 ρ V² | CD | Surface |
|---|---|---|
| The dynamic pressure of the incoming airflow (TAS) | Drag Coefficient | The surface of the wing |
The only difference is that we replace the lift coefficient with the drag coefficient. This drag coefficient is also dependent on the angle of attack (AoA). More angle of attack means more drag, as the leading surface of the plane increases a bit.
The Drag co-efficient is the sum of Induced drag and Paraside drag combined, which we will discuss further:
We have two types of drag, which we can separate into two categories:
Here again we see the third law of Newton into place; where a specific force is reacted with another opposing force.
So induced drag is produced and a reaction of generating lift. This is caused by the fact that the air over a wing has a lower pressure than under the wing. Because of this pressure difference and high pressure wants to flow to low pressure, some lift will leak away which causes some extra drag.
This air can also flow away to the wingtips, which causes some downwash behind the wings. This causes the incoming airflow to get a descending motion and causes the aerodynamic force to tilt somewhat. This also increases the drag component.
We can also have an induced angle of attack where the induced drag is counted from our effective drag.
The induced drag is dependent on the lift as we already stated. The angle of attack also directly impacts this type of drag, where high angles of attack result in more induced drag. The induced drag also increases at low speeds and decreases at high speeds.
Some other factors that can influence the induced drag are:
Ground effect gives us more lift, and therefore also a steeper lift coefficient curve. Keep in mind that leaving the ground effect changes the profit back to normal. Ground effect is at its most at a half wingspan above the ground. At 10% of a wingspan, the induced drag will decrease with almost 50%.
We have to take this change in properties into account, especially with landing:
When taking off, keep this properties into account:
Parasite drag (schadelijke weerstand) is another type of drag, which increases as the speed increases. This has nothing to do with producing lift.
Parasite drag can be divided into 3 categories:
Form drag is caused by the shape/design of the aircraft. As the air flows upon the leading edge, the air will be separated and a pressure difference occurs. By this separation the airflow gets disrupted, building up a new pressure opposing the movement direction. This is called wake.
A brief description is; the more streamlined an aircraft part is, the better the air will follow that part. This will cause less separation and less wake.
A great illustration of this in action:
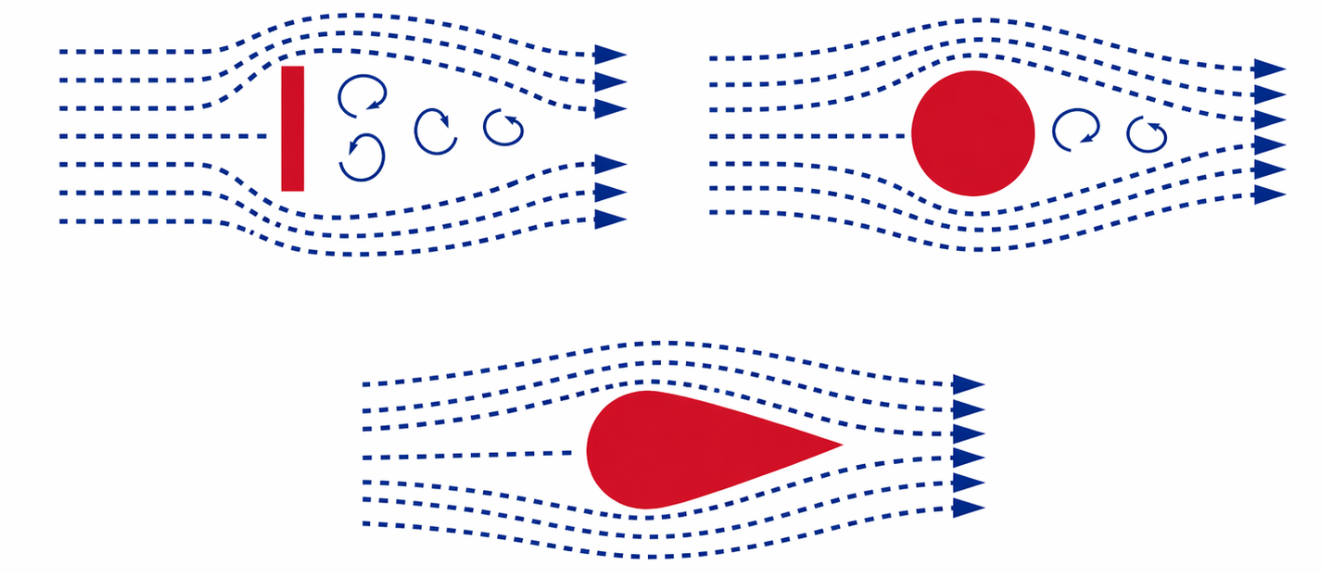
This is the reason planes like the Cessna 172 have wheel-fairings.
When air flows over a fixed surface, air molecules will be braked due to this friction. These slower molecules then will also be slowed down by the molecules farther away from that surface. The further the molecules are away, the less this slowing force is.
Even though air feels light, it sticks slightly to the skin of the aircraft. This creates a thin layer of slowed-down air called the boundary layer. The smoother and cleaner the aircraft surface, the lower the friction drag. Rough surfaces, dirt, ice, rivets, or exposed parts can increase it.
In the cruising phase of a flight, the most drag you feel is an result of the friction drag.
Interference drag is caused by the close placement of all airplane parts close together. All those different parts have their own airflow which can (partly) disrupt each others airflow. This often happens where parts join together, such as the wing and fuselage, struts and wings, or landing gear and body. The airflow becomes more turbulent in these junction areas, which increases drag.
To minimize interference drag, aircraft manufacturers apply fairings to different parts, like from wing to struts.
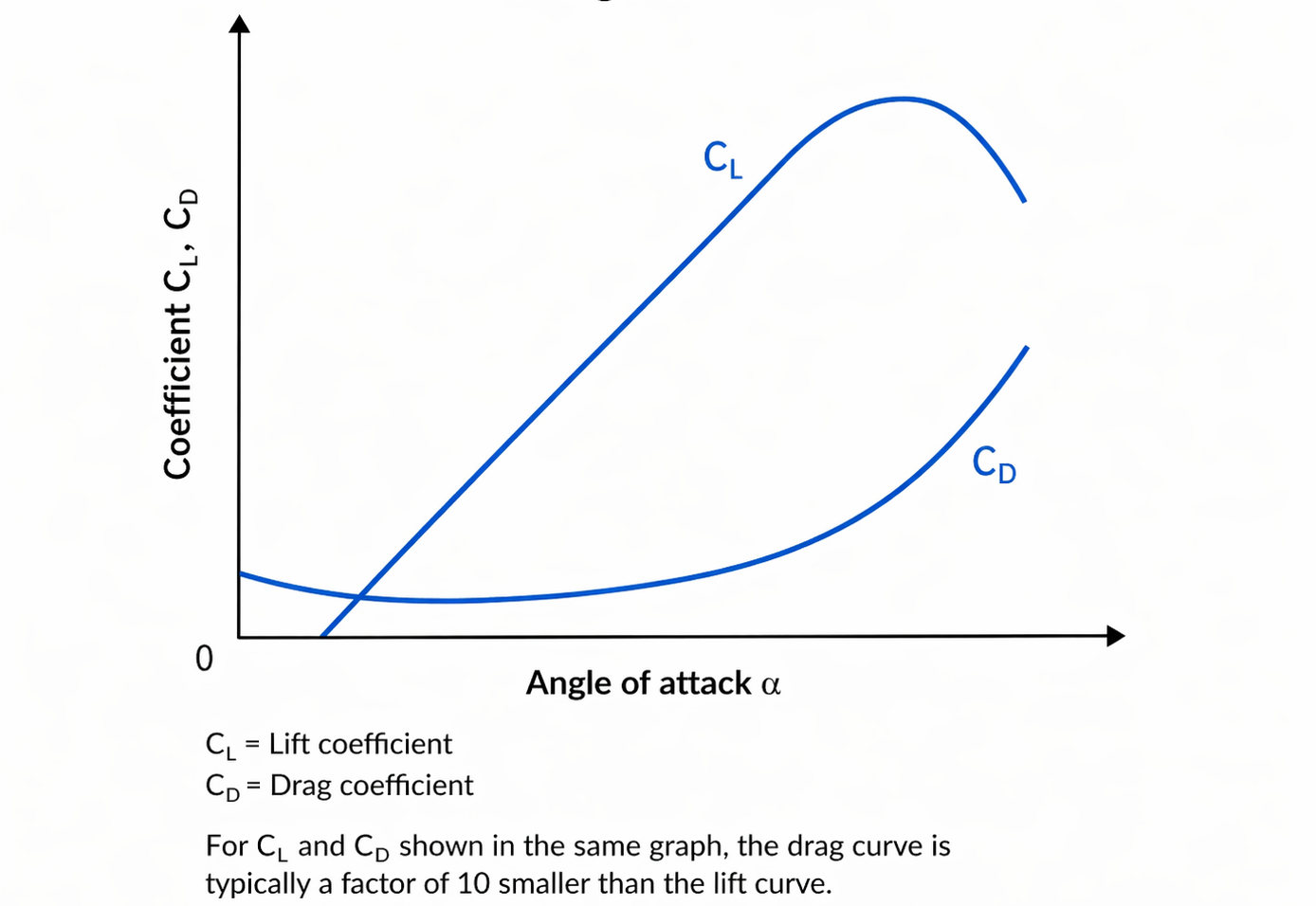
The total drag of that we experience during flights is a sum of induced drag + parasite drag. We can see an example of this put into a graph:
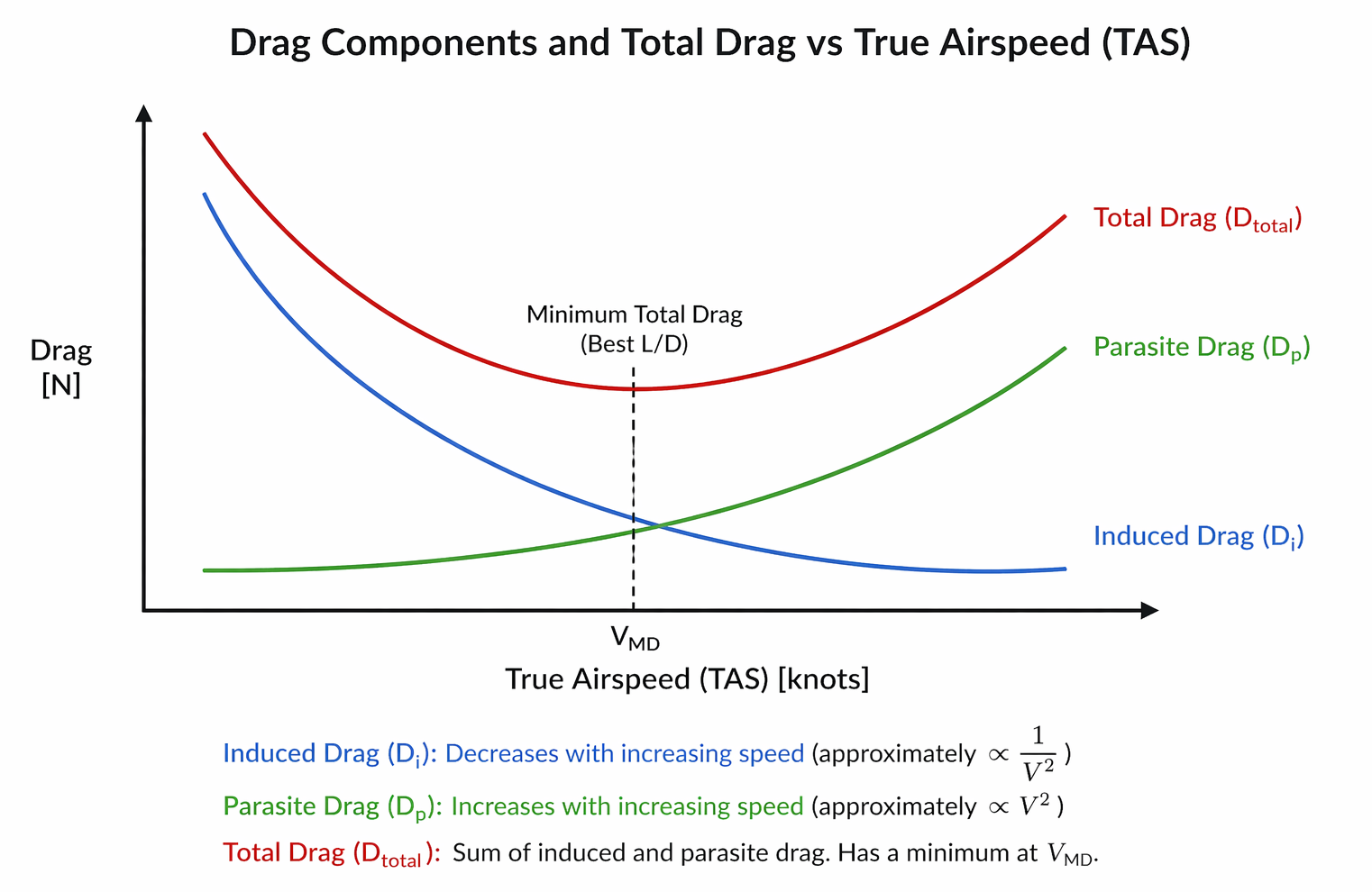
Here we have in the middle a point where we have the least drag, this is where both amounts of drag are exactly the same. This is the V minimum drag (Vmd) speed. Often very similar to our best glide (Vg) speed, used to glide the most distance over a certain amount of distance.
We have a graph to get a better understanding of the two parts of drag and your airspeed.
A stall means exceeding the critical angle of attack. Stalling will occur when the plane has such a high pitch up momentum that the airflow is disrupted. The wing will instantly stop producing lift and the drag will increase substantionally.
Stalling does not neccesarily apply when flying at low speeds. When flying at a low speed, you need to pitch up to retain your altitude. There is a moment that the wings are so high up, causing a wing drop, nose drop or a heavy decrease of altitude occurs. This is a stall. But a plane can also stall when at its top speed, just because the airflow is disrupted.
In aerodynamic terms, we determine the cause of a stalling wing the behaviour of the boundary layer of the wing.
The boundary layer (grenslaag) is the small layer of air which hits the wing surface. At the surface of the wing, the flow of air will be slowed down as result of resistance. At the surface, the air will even be completely still (no-slip). From the surface the boundary layer will span up to where the flow of air is not disrupted anymore.
A good picture of this happening in both laminar and turbulent air, check out this picture:

Laminar and Turbulent are each others complete opposites. Laminar beans that the air is very clean (organized) without movement, laminating the air over and under the wings. Turbulent means that this air is very unorganized which can happen by convection (rise of warm air), clean air turbulence or wake turbulence.
When the air is laminar, the following properties are:
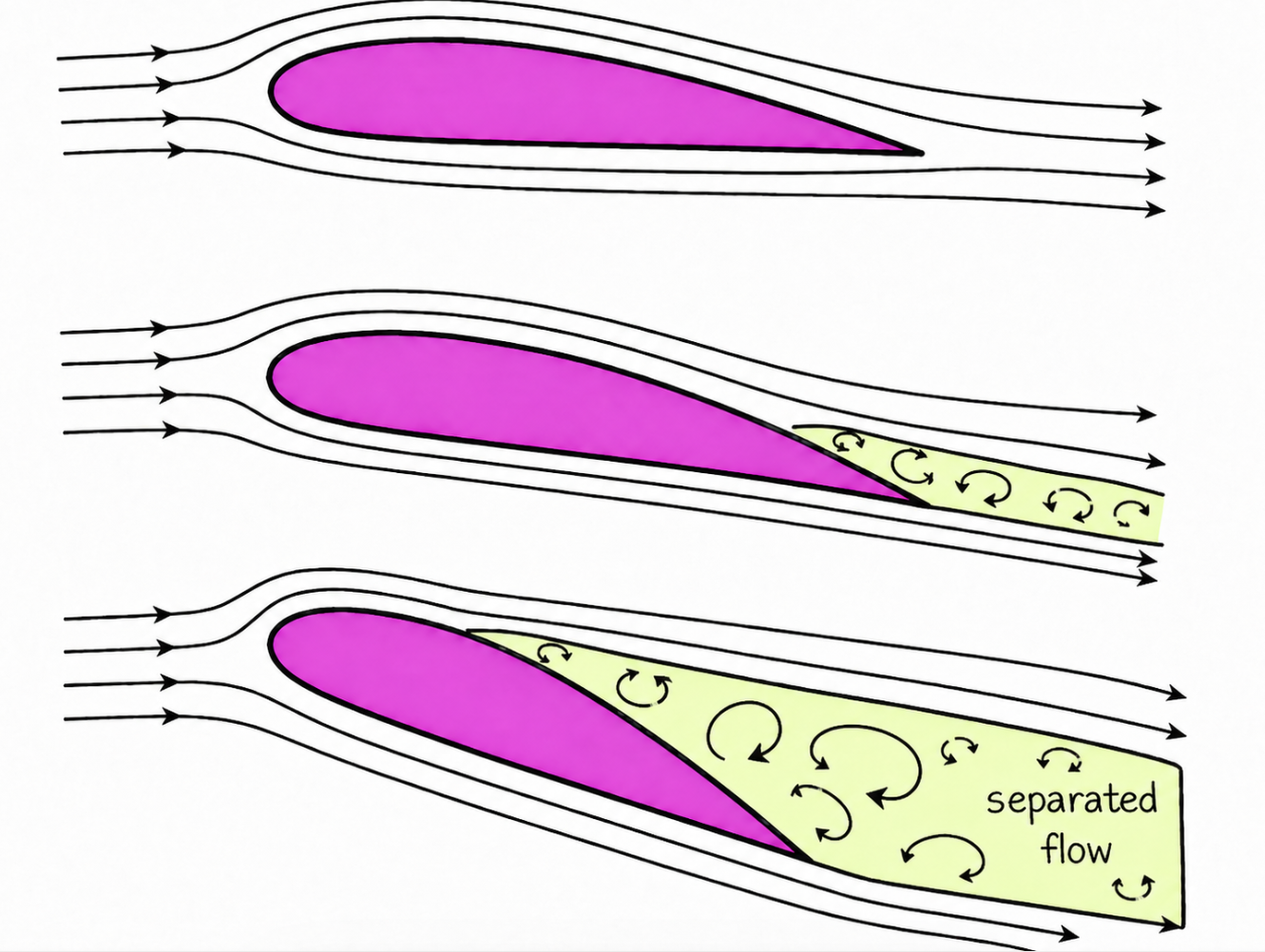
When flying at greater angles of attack, the boundary layer will eject from the wing. This separation will result in a loss of lift, and is caused by the pressure gradient from the leading edge of the wing over the top.
From the leading edge of the wing, the pressure drops to a minimum. The point where this minimum is reached is at the front of this wing. After the front the pressure will increase again where at the trailing edge of the wing, the pressure is equal to just before the wing.
After the point of minimum pressure, the boundary layer has to flow in the opposite way, which is not easy by nature. This will increase to happen if the angle of attack also is increases until the wing is in a complete stall. At this stalling point, the separation point has made all its way to the leading edge of the wing.
A golf ball has some small dents in its skin. These have a very important cause, namely decreasing the size of the separation layer and so decreasing the total drag of the ball.
The effects of increasing the Angle of Attack (AoA) are the following:
When practicing stalls in a plane, we will close the throttle making the engine run stationary and keep our altitude. We do this because power-off stalls are less dangerous than power-on stalls. As we lose speed, we need to correct for it by increasing the angle of attack. All the way to the critical AoA. In the formula of lift coefficient, the lift-coefficient factor increases where the speed factor decreases.
Just for fun, here is the formula again:
| 1/2 ρ V² | CL | Surface |
|---|---|---|
| The dynamic pressure of the incoming airflow (TAS) | Lift Coefficient | The surface of the wing |
You can find the stall speed (Vs) in the pilot operating handbook (POH) of the plane. V speeds are always referenced at the Indicated Airspeed (IAS), which is what you see on your speed meter in the cockpit.
For more information about stalls and my stalls lessons, visit this page:
There are some factors that influence the stall speed of the plane. Because the speed is not a hard value, especially in the atmosphere which can change from time to time, they are all calculated using the following properties and are worst case scenarios:
According to the lift formula, the lift factor must be equal to the weight factor to stay in the air. The lift factor must be higher if you want to climb. The POH always refers to the maximum take-off weight, so the worst case scenario here.
Womething which also is an option is to look at the ratio between weight and wing surface, which we call the wing loading:
How more the wing loading factor is, the more the stall speed.
The load factor is the ratio between lift and weight. We will pronounce this in simple numbers: in straight and level flight, this ratio is 1. When manoeuvering, like turns or climbing this ratio will increase. At an angle of 60 degrees while climbing the load factor will be 2.
We can make this load factor visible with a little addition to the lift formula:
Here is described that the lift must not only be equal to the weight, but on the weight multiplied by the load factor. This makes clear that a change to the load factor has the same effect as on weight increase of difference.
For reference, here we have some numbers where we describe the load factor and increase of stall speeds in different turns:
| Load factor | 1 | 1,15 | 1,4 | 2 | 3,9 |
| Increase in stall speed | 0% | 7,5% | 19% | 41% | 97% |
Fun fact, the load factor is equal to the G-force.
The thrust is the forward power the engine(s) and propellor(s) generates and will influence the stall speed in two ways:
At higher angles of attack, the thrust gets a upward component. The thrust reduces somewhat of the weight, where the lift decreases without stalling. The stall speed will get somewhat lower because of this when having full engine power.
Extra thrust on the propellor will also increase the flow of air over the inside - parts of the wings. The inside parts of the wings will get more air decreasing the stall factor there. This is great, as we keep control over the ailerons. However, when stalling, you must only steer with the rudder to avoid a spiral dive/spin.
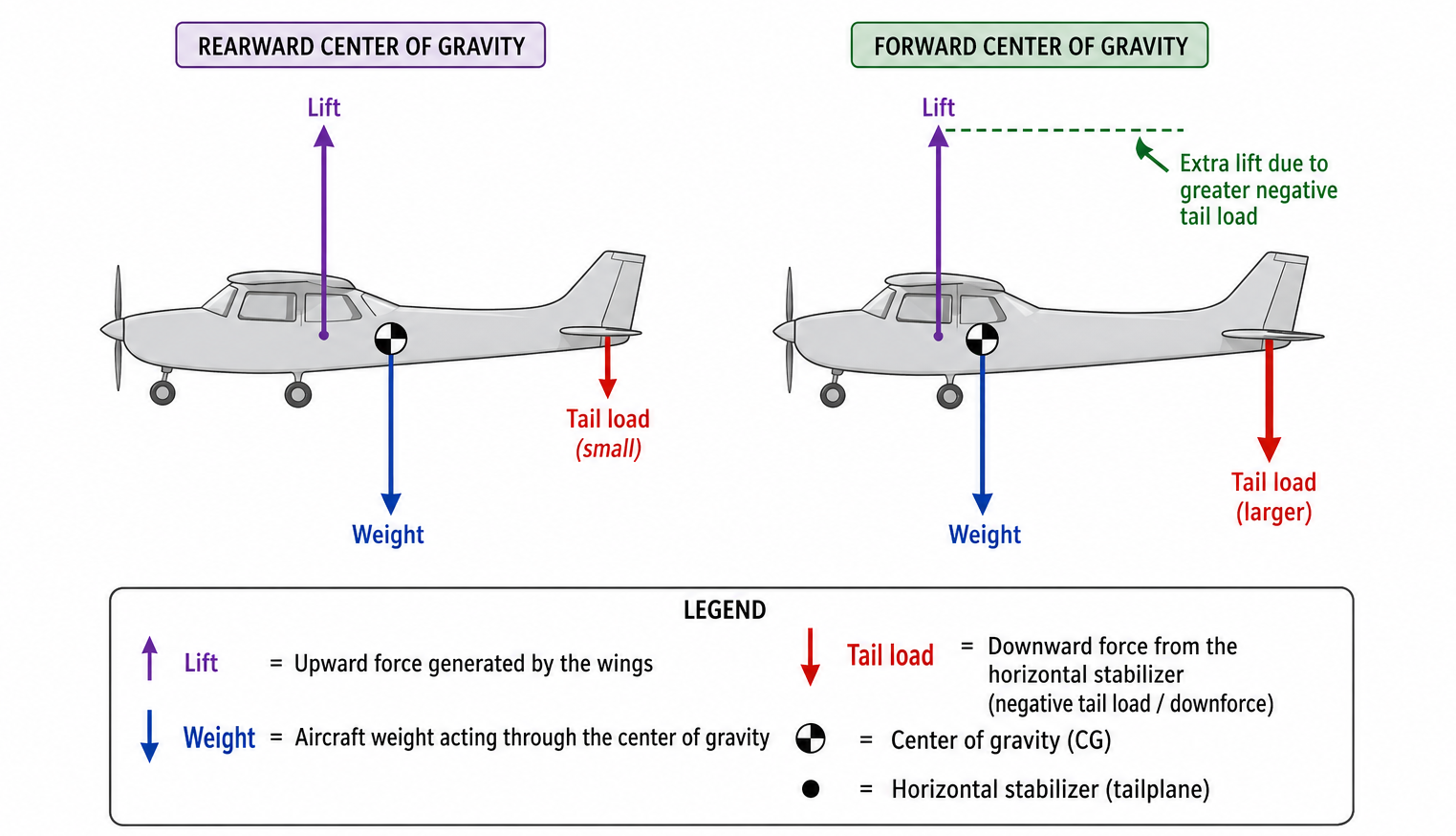
Another factor on the stall speed is the center of gravity. Ever tried to balance a straw on your finger? The point where the straw stays into plane without tilting to one of the sides is called the center of gravity.
In a plane we have also a center of gravity as we must be in balance. If the center of gravity is at the front section of the fuselage, the stall speed will increase. This is due to the extra correction the horizontal stabilizer needs to make to keep the plane level and this increases the stall speed. The POH refers to the most forward center of gravity possible while still inside of the Mass and Balance envelope as worst case scenario.
Turbulence is also a factor which can influence the stall speed. In turbulent weather, the wind speed and direction will constantly change. This results in a angle of attack which also changes in small differences. At low speeds with high angles of attack, a upward wind can pull the plane into the critical angle of attack, resulting in a stall.
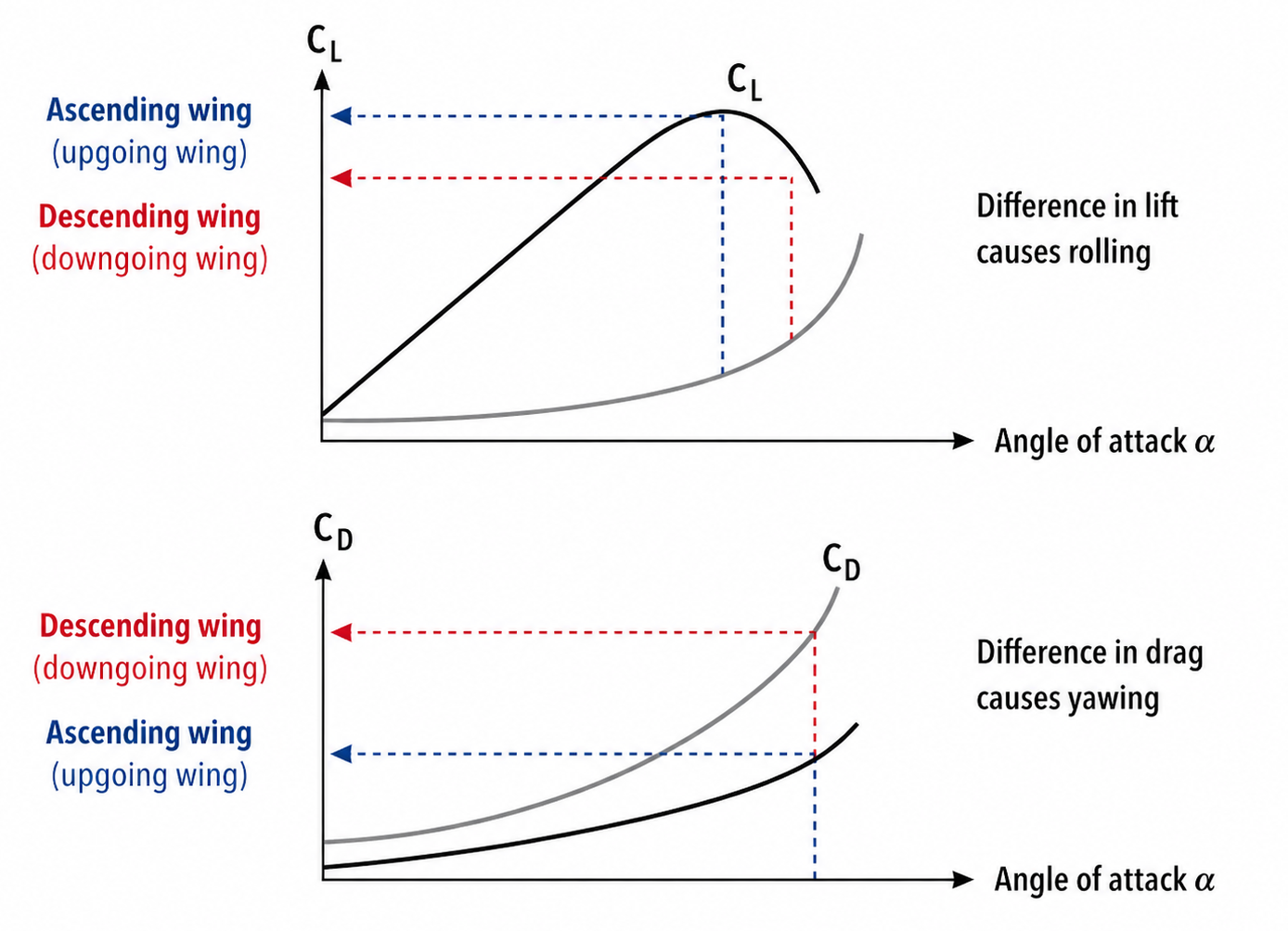
When climbing or descending, the wings have both a different angle of attack. This difference occurs because the outside wing has a longer distance than the inside wing. Because both wings are vertically making the same distance, the flight path of the outside wing has a flattened curve.
In a climbing turn, the angle of attack of the outside wing is the highest. If the speed decreases, the outside wing will stall first. At a descending turn, the inside will stall first. This is the reason the turn from base to final in the circuit is the most dangerous turn, which is commonly flown with somewhat more speed and a less steep turn (around 20 degrees in a Cessna 172).
While climbing:
While descending:
When an aircraft is in a stall, the plane will lose altitude very fast and the plane can become uncontrollable. A stall warning is therefore very important, as this can (re)gain your attention. The stall warning sounds just before a real stall happens, giving you enough time to remediate the risk instead of fixing the stall.
We call it an approach to stall when a stall is around the corner but not fully developed. You can see this as the point in the lift coefficient curve where the line stops to increase.
Sympthoms of an approach to stall are:
We have two types of stall warnings on general aviation aircraft:
Both systems relatively work the same, where both will sound an alarm if the stagnation point will shift more to the underside of the leading edge because of the critical AoA. The electrical flapper works on electricity and is more or less a button which must be pressed up. Is the button pressed, then the alarm will sound. The underpressure horn is mechanical and works at all times, by sounding the alarm if air is sucked through it.
These alarms will sound in normal conditions, at around 5 to 10 knots prior to hitting the critical AoA. However, if dealing with ice build up on the wing, the wing will already stall before the alarm is sounded which makes this situation very dangerous. For more information about ice build-up, check out: the meteorology page.
A nearing stall has some downsides to the controls of the plane. If one of the wings will stall prior to the other, then this will result in a wing dip and also in a spral dive if not corrected. To help pilots with controlling a plane that is about to stall, aircraft manufacturers have some design improvements done to the wings.
As we already discussed, a stall is caused by exceeding the critical AoA. To recover the stall, we need to minimize the AoA and so need to push the yoke forward.
An aircraft has also some features to recover itself aerodynamically:
The stabilo always has a smaller AoA than the wings. This is by design, so the pilot has elevator authority even at a stall of the wings. If the plane stops pitching up, the downwash of the wings will reduce also resulting in the stabilo to decrease its AoA.
Ice can build up on the plane on the ground and during flight, when the air is saturated enough and also under the freezing point. If having ice on the wings and you are still on the ground, do not take-off.
Ice will build up on mostly the leading edges of the wings, horizontal and vertical stabilizer and on smaller parts like the pitot tube and antennas. Even a small layer of ice can reduce lift by up to 50% and increasing drag by up to 100%. This because the friction drag is increases and this will influence the boundary layer.
In short, no flights if having ice on the plane.
During a stall the plane can roll. This roll movement can have different causes like propellor slipstream, turbulence or minor differences in the wings or plane shape.
Because of the roll movements the AoA of the descending wing will increase. As the wing is already stalled the lift will decrease with the result the roll movement will be enhanced and another decrease of lift. When in a stall, roll movements will not be silenced like in normal flight. This roll momement is called a wing dip.
A plane has some side-effects when controlling. If steering with the yoke to roll, some yaw is a side effect. If controlling the rudder to yaw, then rolling is a side effect because of the differences in drag and lift.
In a spin these movements will stay and this situation is called autorotation. The result of this is a downward spin flight or in short a spin.
The spin can be divided into three phases:
We can recover from spins safely if we have the altitude:
Recovery from wing dip
Recovery from fully developed spin
As we already saw in the flight lessons of stalls, we must never use ailerons to get out of a stall. This makes a difference in the AoA of the ailerons making the situation even worse.
A spiral dive looks similar to a spin but in a spiral dive there is no stall active. In a spiral dive the AoA is small at a high and increasing speed.
The spiral dive can occur when making a steep turn of 45 degrees or more to correct for a low pitch by pulling on the yoke. The nose will hardly rise and the turn will be tighter causing the nose to drop even more. The speed will increase in this situation.
To recover from a spiral dive:
The movements of an aircraft can be defined using these three imaginary axis':
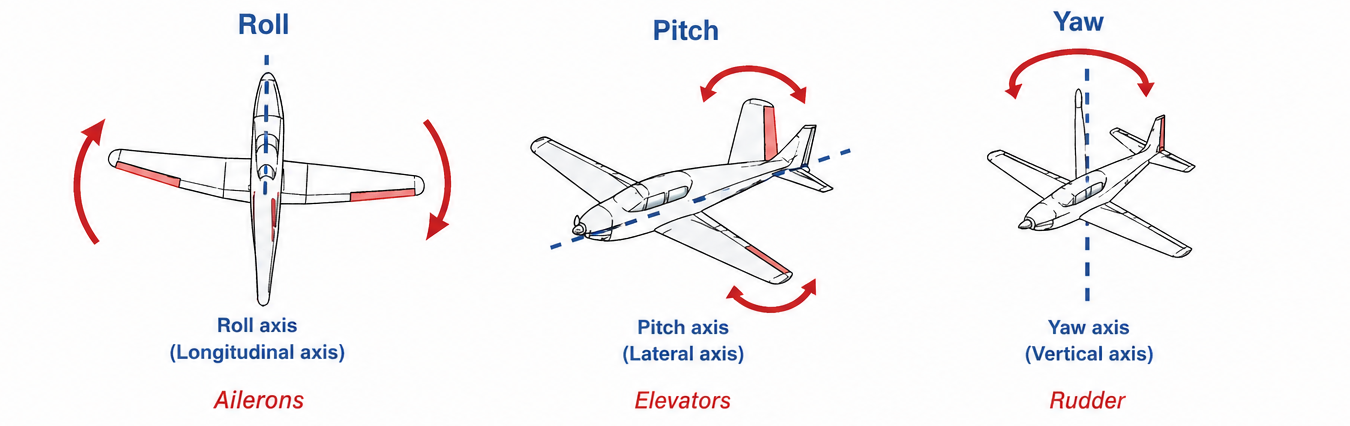
All these axis’ come together at the center of gravity of the plane. To put all effects and controls in a table including the dutch translations:
| Axis | Axis (dutch) | Effects | Effects (dutch) |
|---|---|---|---|
| Longitudinal axis | Langsas | Roll | Rollen |
| Vertical axis | Topas | Yaw | Gieren |
| Lateral axis | Dwarsas | Pitch | Stampen |
These effects and axis’ are primarily controlled by the primary flight controls:
All of these controls work similar. They change the camber (welving) of the wing or elevator. One of those controls in downward position means an increase of lift, where a upward position means a decrease of lift. It just changes how the air flows around.
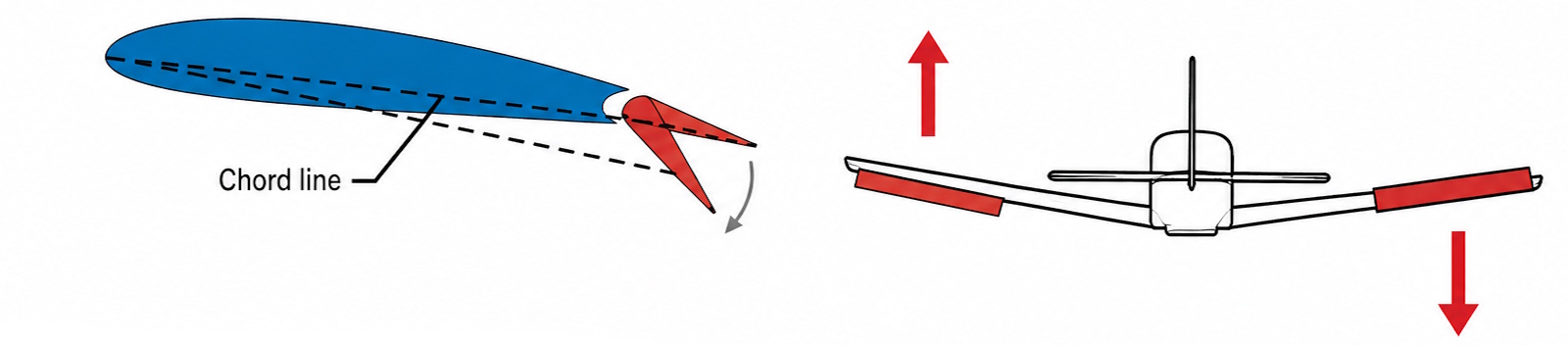
If we look at the ailerons, we can see that they also change the wing’s angle of attack. As a result, the chord line tilts slightly, causing the aircraft to roll. On most aircraft, the ailerons are located near the tips of the wings. This is related to the moment arm: the farther they are from the fuselage, the less control force is needed to produce the rolling motion.
These controls are not completely separated from each other. For example, if we only steer with the rudder, the plane will also roll. This is because the outside wing will produce more lift as result of the higher speed. A rolling effect will be felt and seen.
The other way around, if we only steer using the ailerons, then we can feel also a yawing motion. This is an result of the lift which now works from an angle. The incoming airflow hits the horizontal stabilizer under an angle getting a side-aerodynamic force resulting in a yaw towards the low wing.
The plane wants to get the nose into the wind. This is what we call the weathercock effect.
During a rolling movement the aileron of the upward wing will move down to create more lift. This also results in more drag. This extra drag results in the plane to yaw in that direction which is called the hook effect.
To help reduce this hook effect, aircraft manufacturers apply these design-additions to the ailerons:
The remaining effect can be adjusted by steering with your rudder. This is what we do in the cockpits.
When the control surfaces (roeren) have more airspeed, the effectiveness (which we call authority) increases. As more air passes by over the control surfaces, it has more to make their movements. This is the same reason as why on lower speeds you need to do bigger steering actions.
The elevator and rudders exist in the slipstream of the propellor, so the effectiveness of these tail controls are also dependent on the engine RPM. Not only the airspeed, as on higher RPMs the propellor rotates a lot faster.
The engine RPM also has influence on the effectiveness of the stabilizer controls. More RPM means a faster slipstream and a increase in downwash behind the horizontal stabilizer. If you increase RPM, the horizontal stabilizer will be pushed downward which increases the nose pitch. Decreasing RPM does the complete opposite, lowering the nose and increasing the horizontal stabilizer.
This is a design requirement for all planes; the nose must be going down after decreasing engine RPM to hold a specific speed. This prevents a unpredicted stall.
The construction of an aircraft has a good flexibility and can deflect some during aerodynamic forces. If a wing bends downward because of turbulence, the aileron will be somewhat behind because of mass slowness and results in the wing pushed even further downward.
In the process of mass balancing, sometimes there are placed some small parts of metal in various places on the plane to ensure both sites are of equal weight. This decreases things like flutter which is an aerodynamic unbalance and can break an aircraft in seconds. This is always done in the section before the Vne speed, which is the Never Exceed Speed (160+ knots on a Cessna 172).
Any of the control surfaces will pick an attitude which is level with the incoming airflow. To actually steer an aircraft, the pilot must win this incoming airflow by putting more force into the controls. In the factory, aircraft manufacturers apply some tricks on the airplanes to keep the controls into balance. One of the things on a Cessna 172 to achieve this aerodynamic balance in the controls is a horn balance. This is this part of the elevator:

Aerodynamic balance can be seen as powered steering in cars. They make the steering process a bit better, decreasing the change of flutter.
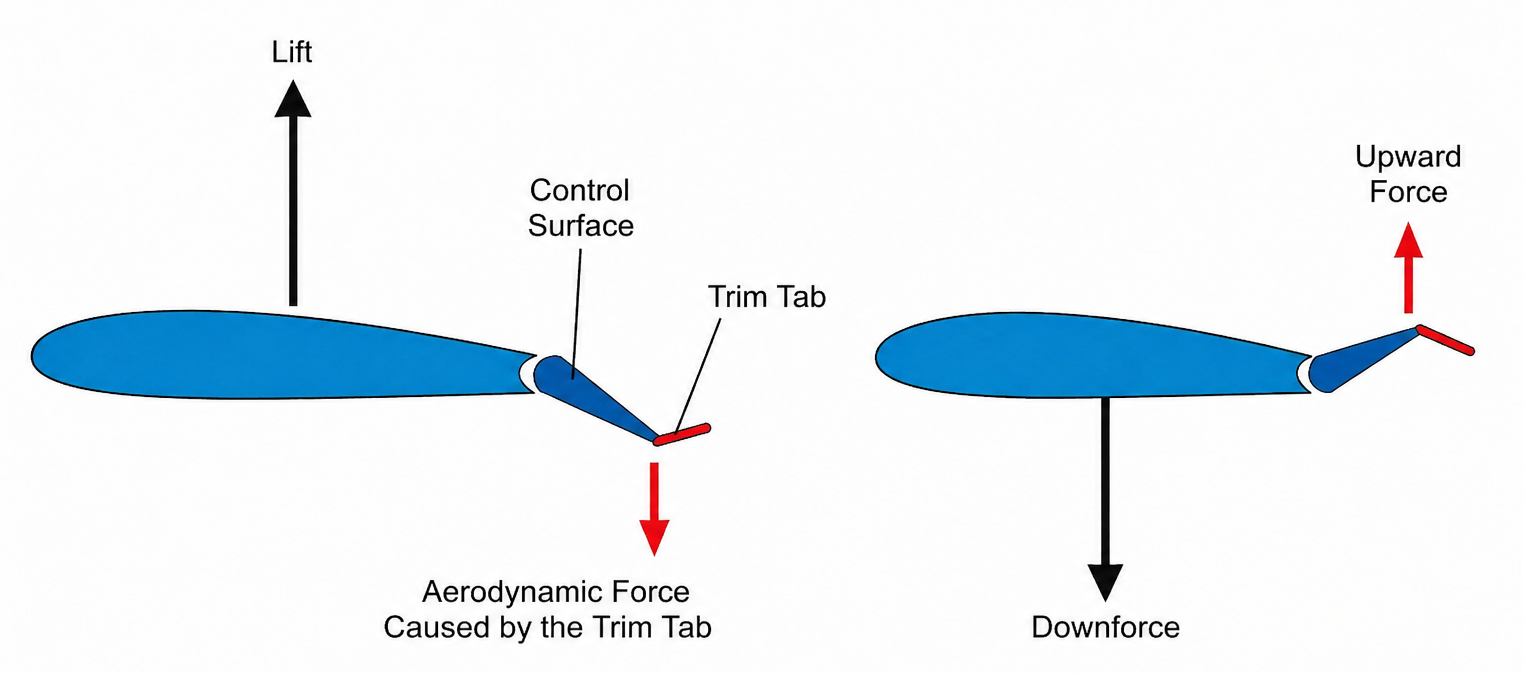
A plane also has some trim surfaces which are mostly controlled using a trim wheel in the cockpit The movements of this wheel corresponds with the movement of the yoke.
These are two types of adjustable parts of control surfaces to further enhance flights:
Trimming surfaces are so small parts of moveable control surfaces at the end of that surface. These can be set in a specific way, so the pilot doesnt need to apply forces on the yoke at all times.
For example, the Cessna 172 has a adjustable trim surface on the elevator. With this surface, we have a small part of the big elevator which can be controlled to stay in a desired position. This only controls the pitch axis.

This small part changes the camber of the elevator, where the elevator surface controls the camber of the horizontal stabilizer itself. By setting the trim there will be some camber at the backside of the elevator. This small setting is enough to keep the elevator in a fixed position. All of this is done using aerodynamic forces, so that is the reason the position of this trim is completely the opposite of the elevator itself. At take-off we set this small surface level with the elevator.
This trim in a Cessna 172 is controlled using a trim wheel in the cockpit.
A plane sometimes also has some ground adjustable trims, like the bottom corner of the rudder. If the plane has a few grams offset, these can be bent to make them aerodynamically stable.
Some planes also have balance-surfaces which reduce the force needed to steer the aircraft. This is the complete opposite of the trim, where the balance surface does exactly what the elevator itself does, sometimes even with a bigger steering effect.
Flaperons (kleppen) are meant to alter the flying properties at lower speeds. These are surfaces at the trailing edge of the wings. They work basically by changing the camber of the wing somewhat, where they increase lift and drag. This makes flying at lower speeds possible during take-offs and landings.
Flaps are often mechanically or electrically and are measured in how much degrees difference they offset from the angle of incidation of the wing.
Flaps have some pro’s in using them:
Historically multiple types of flaps has been tested and the most used types are these:
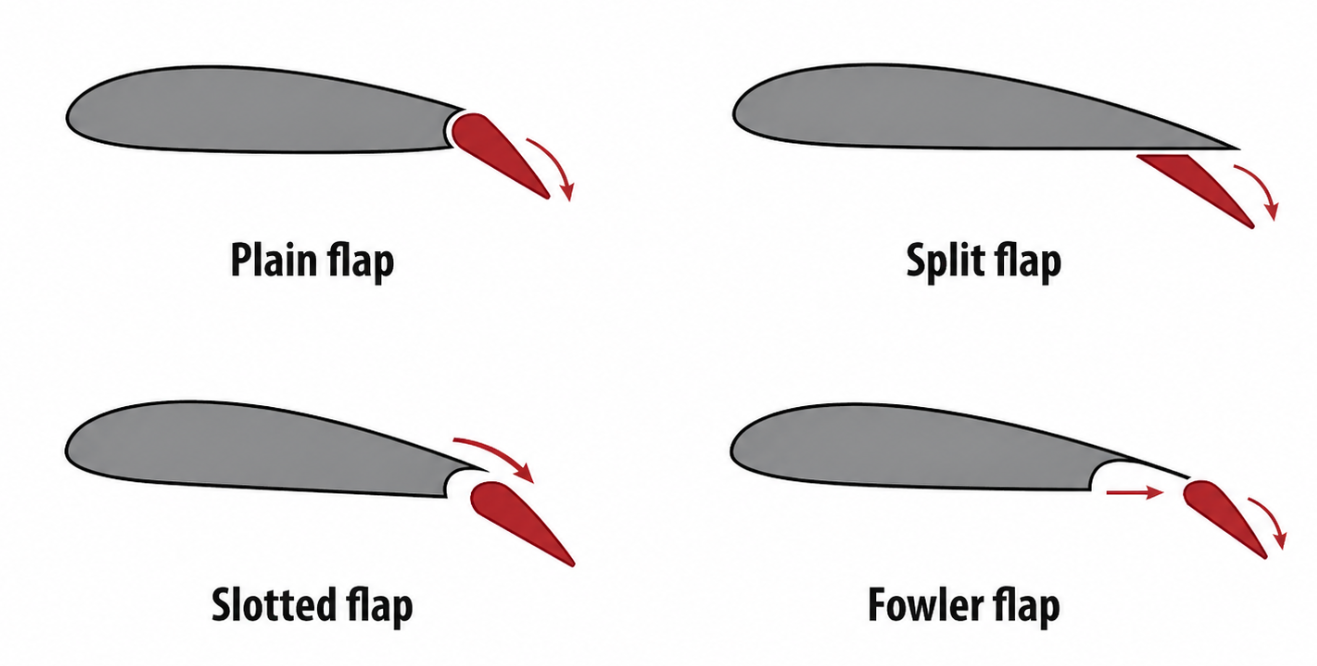
We generally use flaps in the take-off and landing phases of flight where these have advantages.
During take-offs
After taking off, we set them very fast to 0 as because of the increased drag, we will achieve lower speeds.
During landings
Slats have the exact same purpose as flaps, increasing the lift coefficient making lower speeds possible. They are installed on the leading edge of the wings instead of on the trailing edge. They are always combined with flaps settings to prevent any assymmetry from happening.
Slats also help increasing the critical AoA where flaps only decrease them but help to fly at lower speeds. Slats are mostly used on bigger commercial jets and bigger general aviation aircraft.
According to Newton’s first law, an object without any forces will move in a straight line with a certain speed. Making a turn thus needs a net force. The net force on an object is the sum of all forces acting on it.
“An object at rest stays at rest, and an object in motion stays in motion at a constant velocity, unless acted upon by a net external force.”
This force will work right onto the movement direction of an airplane and because every turn will be part of a circular movement, the required force will point to the middle of the circle. This force is called the centripetal force (middelpuntzoekende kracht).
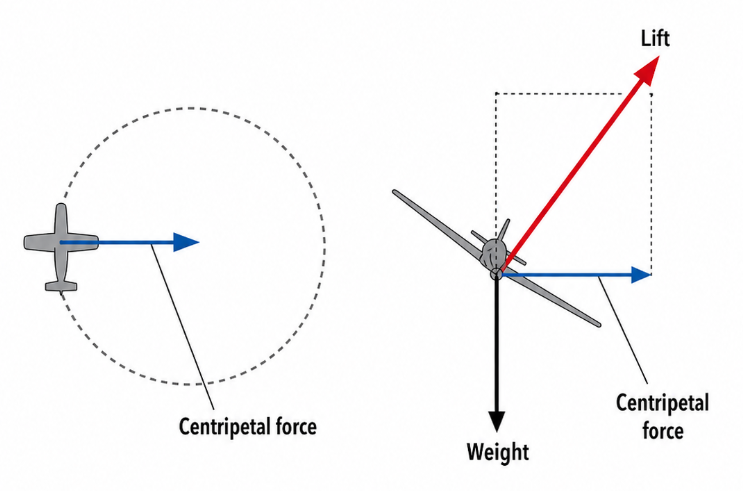
This centripetal force is a result of the horizontal component of the lift which occurs when the plane banks into a turn.
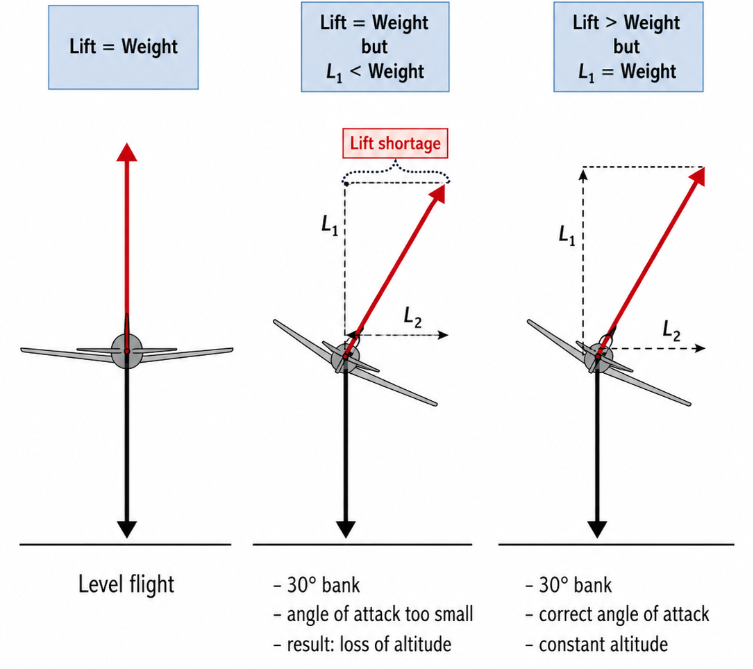
If a plane turns in an incorrect manner, there will occur a situation where there is no balance between the vertical forces. The gravity will stay in a straight line to the earths surface but the vertical component of the lift is tilted (to the turning side) because of the turn. This vertical lift component is now smaller than the gravity, making the plane go down. This is why a plane needs some back pressure on the yoke in turns, which increases some lift to compensate and recover the balance between lift and weight.
To get a better view of this occurence:
The speed of how we fly a turn is called the “rate-of-turn”. This is measured in the amount of degrees change per second. The most important one is a Rate one turn which is 3 degrees per second and costs 2 minutes for a full circle. You can calculate the amount of degrees needed to bank with this formula:
As we can see, the airspeed is a dependency on the bank angle. Let’s say, we fly at 135 knots and want to make a rate one turn:
Some other examples:
The fun fact is, the only two dependencies are the airspeed and the bank angle. If you want to fly a turn slower, decrease your airspeed. If you want to complete a full circle faster or in a more narrow area, increase the bank angle.
During a turn there will be some yawing motion. The nose will also turn in the direction of bank. If the yaw-speed is correctly and in sync with the bank angle we speak of a coordinated turn. A situation where the incoming airflow is coming straight from the front, seen from the cockpit.
If this is not the case, we have two other options:
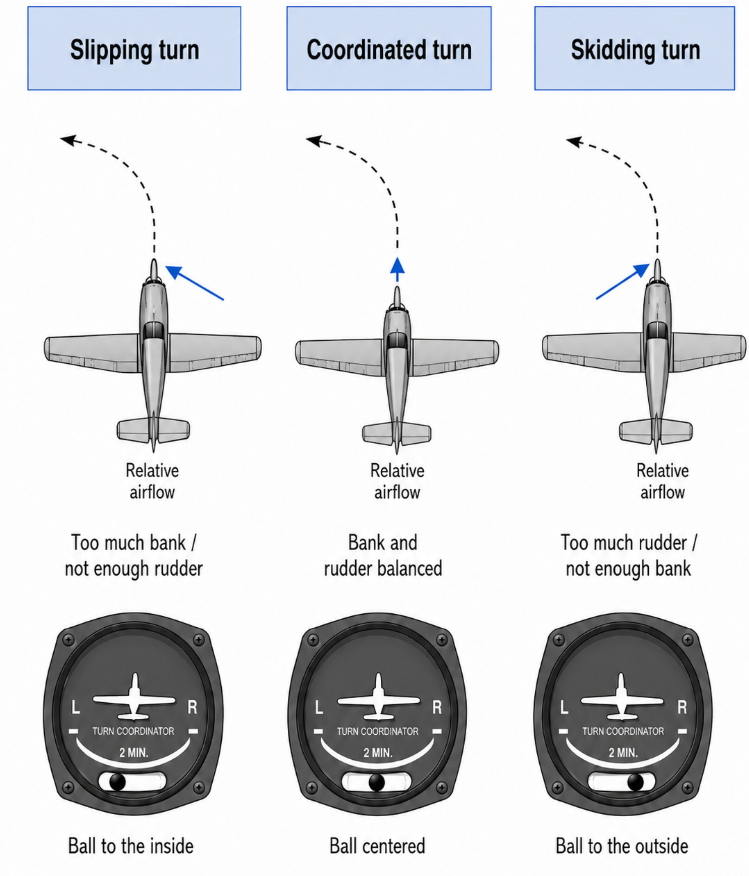
In the cockpit we have the turn coordinator which works with a gyro, telling us exactly how much rudder input the plane needs. The keyword here is: “Step on the ball”, meaning to press the pedal at the side of the ball just to keep it in the middle.
The construction of an aircraft needs to be solid enough to catch all forces, both on the ground and in the air. The aircraft parts need to be strong enough to carry its weight on the ground, especially at harder landings. In the air, the plane also needs to be strong enough to withstand some maneuvers like:
During the design of an aircraft, manufacturers takes the expected load factors into account. The load that an aerobatic plane gets is of course much higher than a Cessna 172. Under static strength of an aircraft we think of the force or load the construction can have once without breaking. If an aircraft is under load for multiple times there can happen some metal fatigue, permanently weaken the construction. During the walk around, this is one of the visually things to check on an aircraft:

The maximum load factor which the plane must withstand is called the limit load. This possible load factor number is the force a plane with an undamaged construction can have. Under this number, some part smay temporarily bend like the wings but the flight properties may not be influenced.
The static strength of an aircraft is measured in G-force, where a plane on the ground is always 1G, or 1x the mass.
Again, here we have some numbers where we describe the load factor and increase of stall speeds in different turns:
| Load factor | 1 | 1,15 | 1,4 | 2 | 3,9 |
| Increase in stall speed | 0% | 7,5% | 19% | 41% | 97% |
Now we have some extra numbers for different category airplanes:
| Category | Positive load | Negative load |
|---|---|---|
| Normal | + 3,8 G | - 1,52 G |
| Utility | + 4,4 G | - 1,76 G |
| Aerobatic | + 6,0 G | - 3,00 G |
Always refer to your planes POH for the actual numbers, the numbers above are generally for aircraft categories. Different planes are certified for different amount of forces.
Planes are mostly designed to carry positive lift, so the positive G force numbers are higher than the negative numbers. During negative G forces, all parts are loaded downward but planes are actually designed to fly upward.
The load factor diagram shows at which speeds a specific aerodynamic load is pushed on the plane. The load factor as we already know is a ration between lift and weight so these numbers influence the load factor. To be careful enough we need to take both numbers into account.
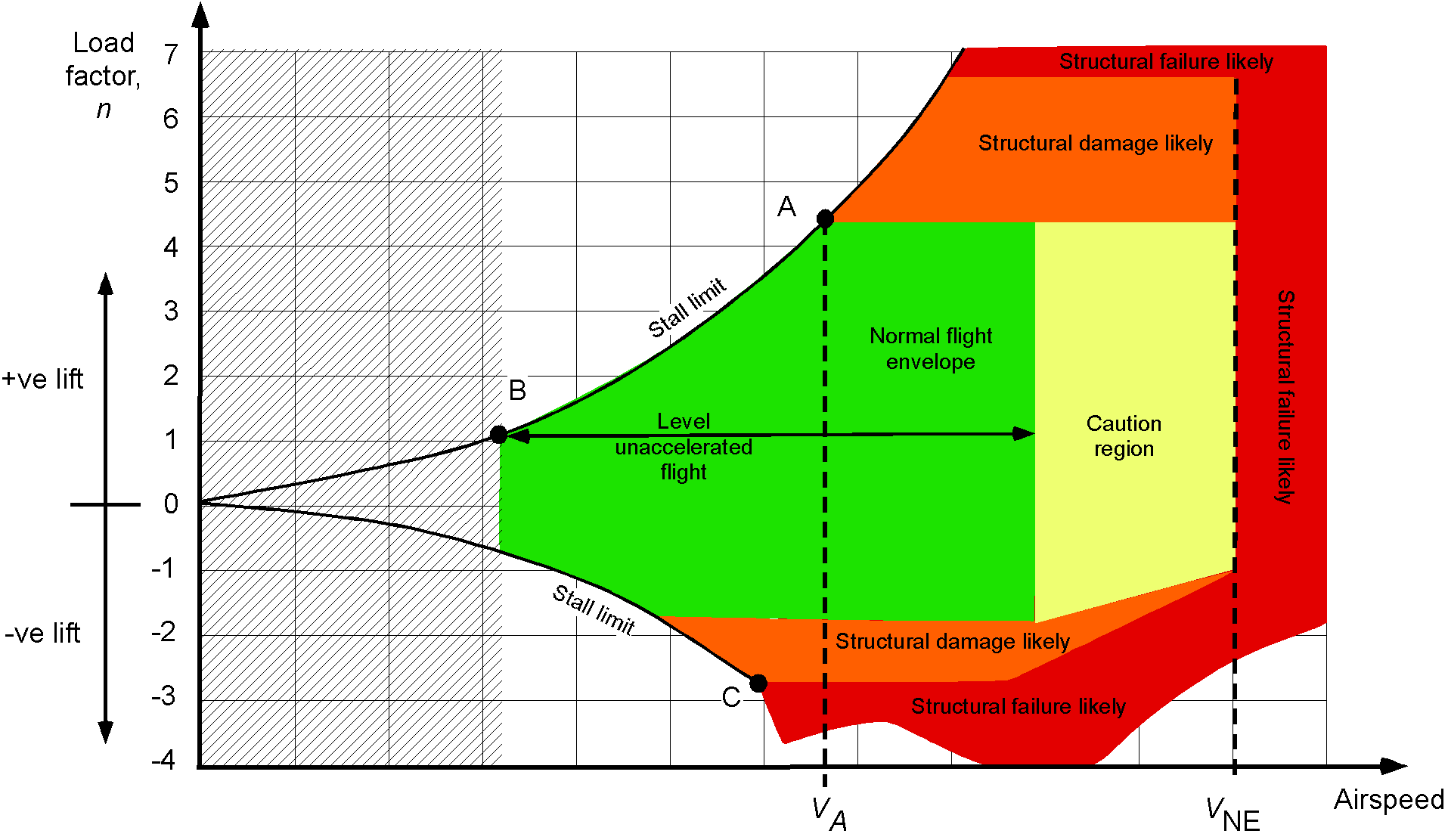
At higher speeds we can produce more lift, so the lift number goes up at higher speeds. The Va speed is the maneuvering speed of an aircraft, which is around 103 knots in a Cessna 172. This is the speed where full inputs can be given to the plane without overstressing the plane. The Vne speed is the Never Exceed speed and is the red line on the airspeed indicator.
The non colored parts of the graph are outside the stall limits no are aerodynamically not reachable. As you can see is the most change of overloading the aircraft at higher speeds.
When a plane flies at 87 knots for example, a pull on the yoke will result in the plane first loaded to 2G and then in a stall as it comes outside of the green area. At an speed of 120 knots and higher with a Cessna 172 its possible to reach the limit load factor. But this can be reached earlier in the envelope if the plane has more weight. This is described by the second law of Newton: “The acceleration of an object depends on the net force acting on it and the mass of the object.”
Obviously the job of the propellor is to convert engine power into thrust. Thrust is forward power of the plane which also can be helpful turing climbs. The propellor of the plane is directly connected to the crank-shaft (krukas) or indirectly with a gearbox.
Most planes in general aviation have 2 to 4 propellor blades and can contain up to 7 in some cases, but 2 to 4 are the most generic options. The blades are often made of aluminum or carbon fiber and meet each other at the hub, where the propellor is connected to the crank-shaft. The part on top of the propellor is called the spinner, which makes the propellor aerodynamically streamlined.
Propellors of a fixed pitch propellor plane are often twisted at the center. This is done to make the AoA of the propellor in the incoming air the same for the whole blade. The center part gets less air, so get a higher AoA. Exactly the same principle as the wing and the flaps as we already know. This is called propellor wrong.
The spinner is streamlined for better aerodynamic performance but also is used to steer air into the air-inlets to cool the engine. Very clever designing.
The propellor works almost the same as a wing. They also have incoming air and the blades making an AoA relative to the incoming airflow. The propellor then causes a resulting air force. This force can be divided into:
The blade angle of a propellor is the angle between rotation-axis and the chord of the blade. The pitch of the propellor (spoed in Dutch) is the theoretical distance the propellor covers in one rotation:
The blade angle of a propellor is similar to the angle of incidence on a wing.
The angle of attach of a propellor blade is the angle between chord and incoming air. Just like a wing. A plane who is standing still on the ground, the AoA is equal to the blade angle as there is not that much incoming air. If the plane moves forward, more air will come in from the front. The angle of attack decreases in this case.
At an increasing forward movement speed the AoA will be 0 or even negative. The propellor doesn’t produce thrust anymore.
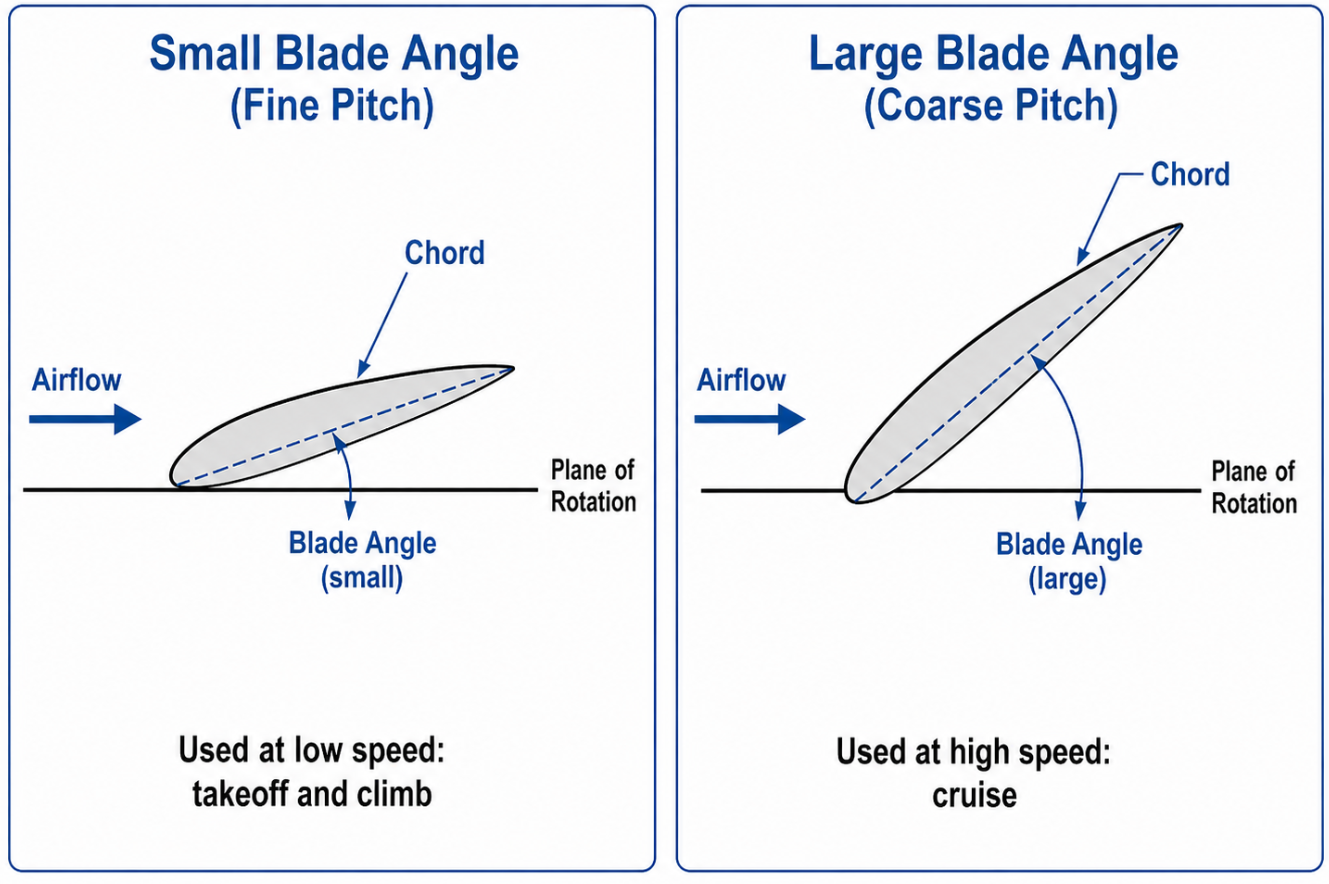
The propellors of fixed pitch propellor planes like the Cessna 172 are slightly wronged. This means the root of the propellor has a bigger AoA than the tips. As the whole propellor rotates, the tip will cover a much bigger distance than the root of the propellor. This results in less air picked up. To compensate for that effect, the AoA is higher at the root of the propellor to span the thrust over the whole blade. If these are not wronged then the propellor will be working very inefficiently.
In fixed pitch propellor planes like the Cessna 172, the RPM of the engine is equal to the RPM of the propellor. The AoA of an propellor is the highest when standing still on the ground. At a high AoA, the drag is also much bigger making full throttle exercises not very dangerous for the engine.
When flying the propellor produces forward motion (thrust) the AoA will decrease. This also results in a lower drag making the propellor spin slightly higher. Theoretically you can’t exceed the engine rpm limits on the ground, only in the air because of this. This phenomenon is also to be seen during flights. When the pitch attitude is higher, the engine RPM will decrease. When descending, the RPM will decrease. During descends we also draw the power back. The much lower drag and the extra downward thrust you otherwise get can reach high speeds in seconds.
When the forward speed increases, the AoA of the propellor will decrease. At a certain rotating speed the AoA becomes zero and no thrust will be produced by the propellor at that point. If the speed increases even more than that, the propellor AoA will be negative; the propellor produces drag instead of thrust.
The propellor stays rotating because of the incoming airflow, making it a flying windmill. At an engine failure, the propellor will also continue to rotate. This windmilling effect causes some more drag. This extra windmilling decreases the glide angle and so gives you less gliding distance.
The power a propellor gives is dependent of the forward speed. Power x speed. If a plane is standing still with a rotating propellor, trust is produced but the power is 0. At an increasing forward speed the power is also increasing, till the limit is reached. As we just learned that the AoA decreases at higher speeds, the thrust will eventually also be decreased.
If we make a relational graph with the power and speed, the curve will be increasing till the point where the AoA is zero. The power will then just like the lift coefficient drop very vast.
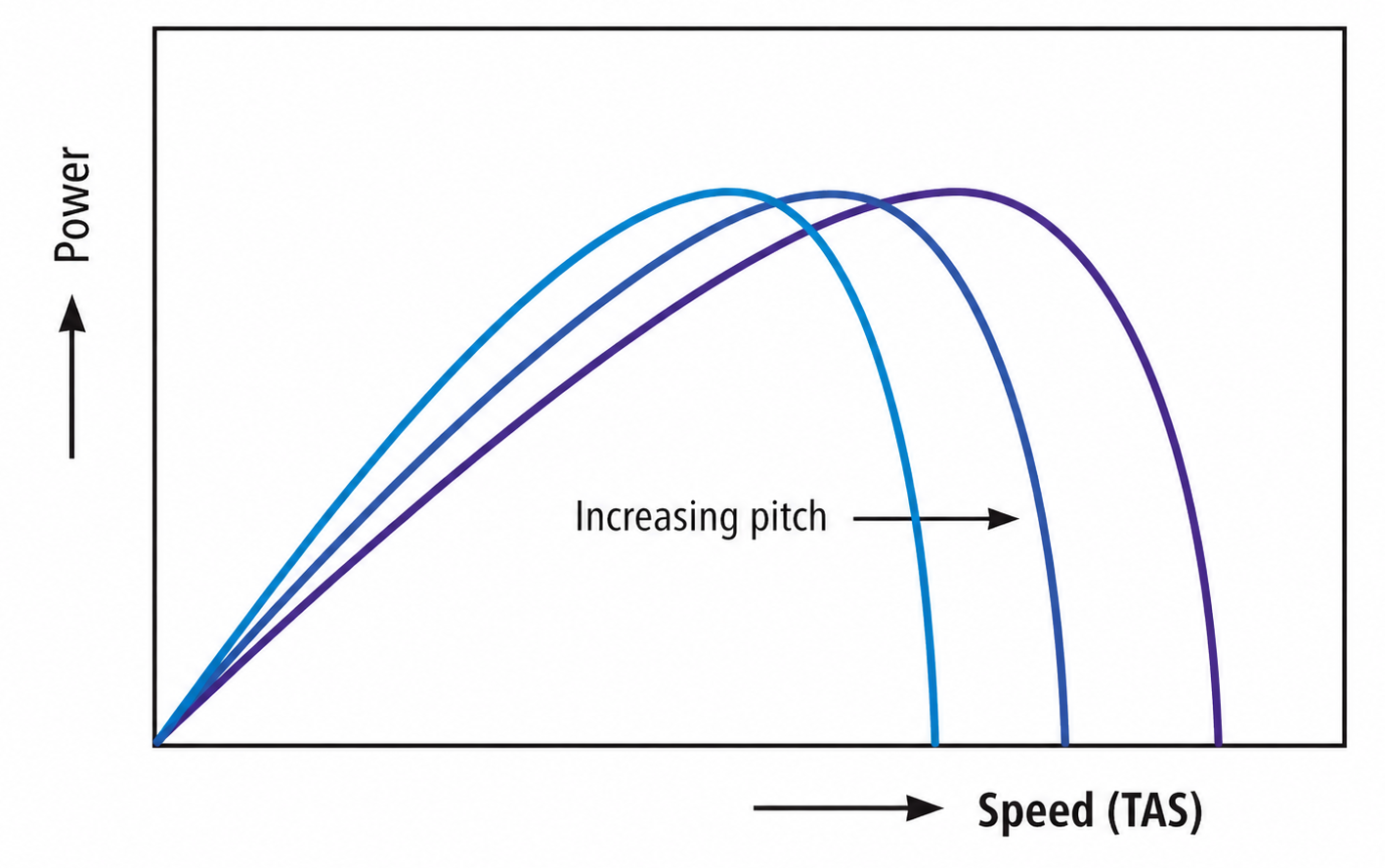
This is the case for a fixed pitch propellor which only produces optimal thrust during a certain speed, dependent on the construction of the propellor. It works good during or climb or cruising but never both.
Aircraft manufactures thought of a clever idea to make propellors where the pilot can set the blade angle based on the flight phase, where they can decrease the AoA in climbing phases and increase the AoA during cruise to get the most out of the engine at all times. These planes are called constant speed propellors -> the propellors always rotate at a constant speed.
This gives the pilot 3 handles instead of two. Next to a throttle and mixture they alsy get a blue for this cause. With that handle you can set a desired propellor RPM where you still control the fuel inlet pressure (manifold pressure) with the black throttle.
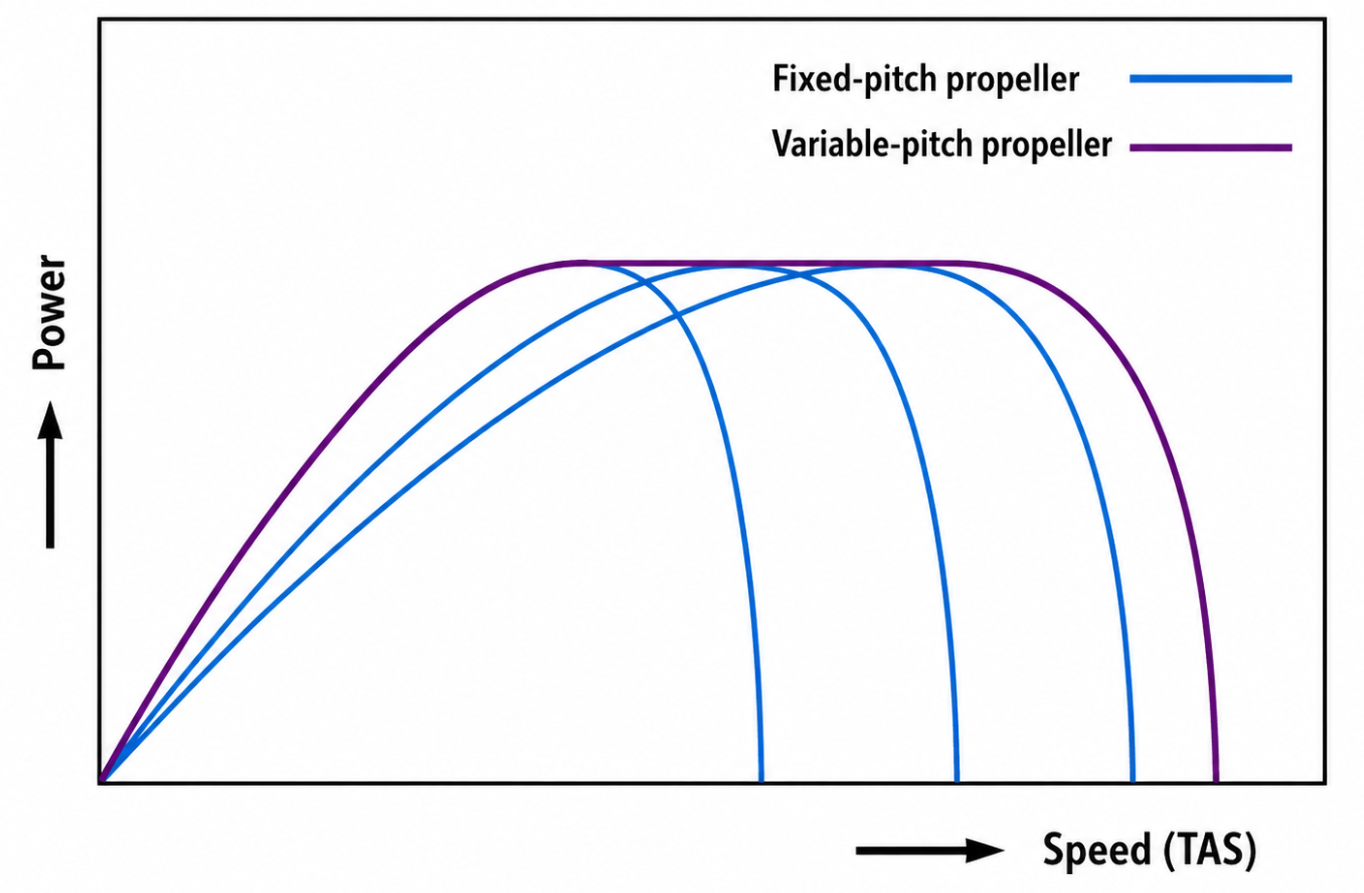
The graph shows that the line of a constant speed propellor is more flat and spanning the whole range. This means it can convert as much engine power to thrust as possible, and not only during climb or only during cruise.
You can see the constant speed propellor just like switching gears in a car. You can switch gears at all times to make the fuel efficiency better but also get higher speeds when you most need them.
The propellor is a great tool to produce straight forward motion called thrust. But the propellor also causes some aerodynamic side effects:
Let’s dive deeper into these three effects and how to take them into account as pilot and ultimately counteract them.
The slipstream effect on single engine planes is caused by the right-rotating prop (seen from the cockpit). This slipstream rotates around the longtitudinal axis of the plane and hits the vertical stabilizer and rudder. During climbing situations, this results in a yawing motion to the left as the right-turning air hits the vertical stabilizer on the left side.
Aircrafts are designed to somewhat suppress this effect by assymmetric stabilizers, setting this under a small angle or a small ground adjustable trim surface on the rudder.
If we set a lower RPM, the slipstream becomes way less and then aircraft designs tend to yaw right. This is why we learn in single engine planes to counteract this effect as following:
Think of: Low is Left or Left is Low.
The P-factor or assymmetric blade-effect with right rotating prop as seen from the cockpit is caused when a propellor that rotates is not perpendicular (loodrecht) to the flying direction. The downward blade produces more thrust than the upward blade. At high angles of attack, the downward blade moves in the flying direction but the upward blade moves opposite to the flying direction. The downward blade gets a higher AoA where the upward blade AoA decreases, and as we just learned that a higher AoA procudes more trust, we get asymmetrical thrust. The actual result is the nose of the plane wanting to go left.
This is the somewhat strange cause of why we need to give some right rudder in a left climbing turn.
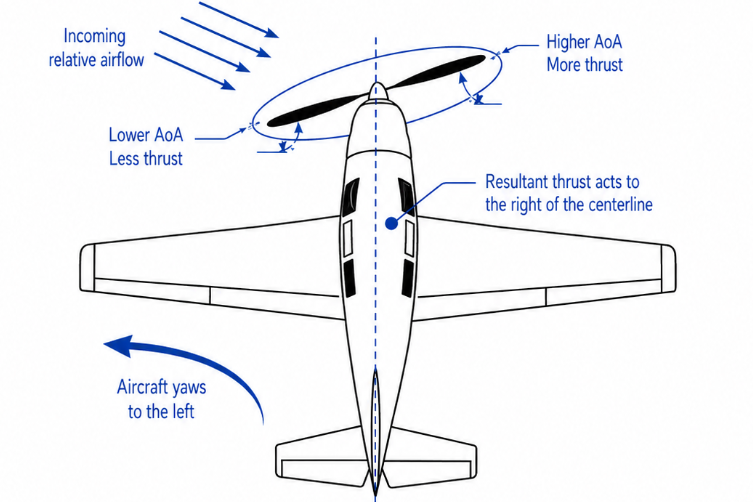
The torque effect is exactly how it sounds, a rotating propellor produces a torque/rotating effect. We have to agree with mr. Newton again because this is an effect of his 3rd law; “For every action (force) in nature, there is an equal and opposite reaction”
The action is the propellor turning and the reaction is the fuselage of the plane wanting to roll left. This is mostly noticable during the take-off phase. The plane wants to roll left, resulting in more drag and force on the left wheel. The torque effect is therefore the same direction as the slipstream effect and increases the tendancy of the plane to go left.
During take-offs or touch and go’s, counteract by steering somewhat right with the rudder.
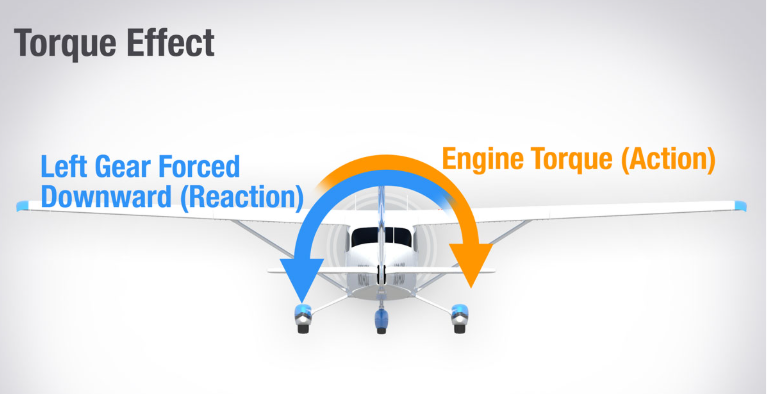
Source: Boldmethod.com
An aircraft is continiously exposed to different attitude changes as result of wind, turbulence, convection or smaal yoke inputs. After being exposed to such change the forces and moments on the plane wordt not be balanced causing a huge workload for the pilot. Flying must be fun and easy to do, the easier it is, the safer.
An aircraft has great control-properties if its stabilityis good. With stability we mean that the plane must restore itself to the balance state after a small change, apart from if this change is intentional or not. Stability also has some downsides, when turning or maneuvering we are changing the attitude of the plane and makes this somewhat harder. Aircraft manufacturers seek to find the perfect balance between stability and maneuvering.
We can have three types of stability:
Some examples of how this looks:
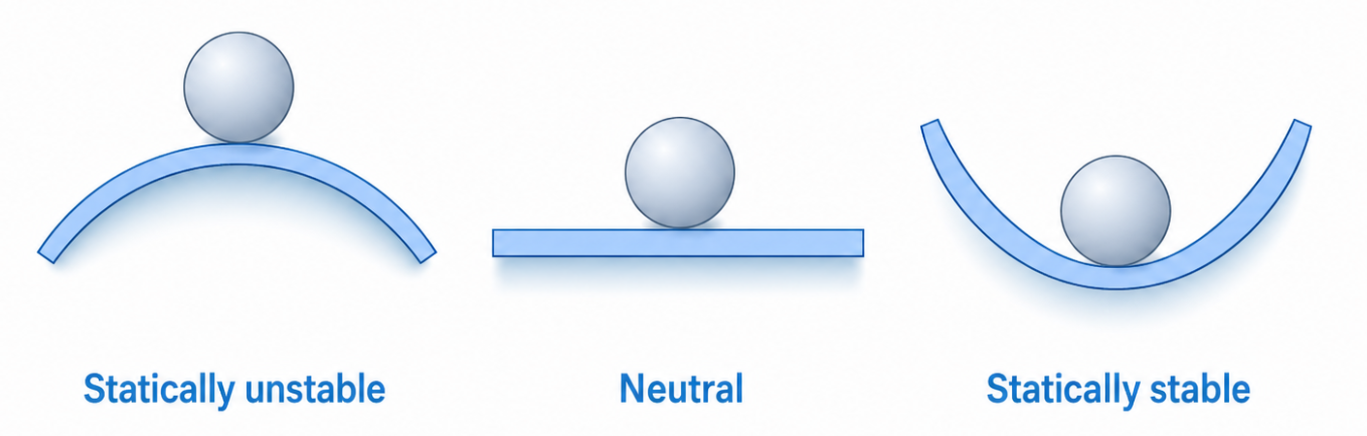
As we can think of the mass of the ball and the gravity working against themselves, in the statically stable situation, the ball would move around somewhat and then return to the before point when moving. This makes it statically stable.
The ball on the left would after moving never reach its stability point. The middle ball will constantly pick a new balancing point, but will need continuous corrections.
The dynamic stability describes the flow of the three situations above into the speed of returning to the balancing point and thus being stable. When a plane’s attitude is changed during cruise flight where all 4 flying forces are balanced, the plane must return to that balancing point as soon as possible. We can only achieve dynamic stability if the plane is statically stable.
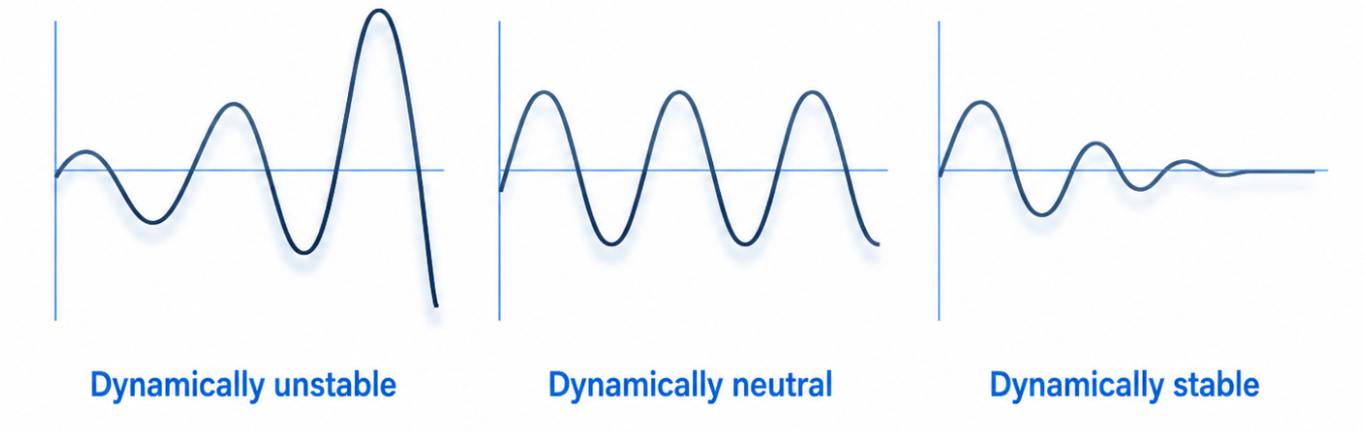
| Axis | Axis (Dutch) | Stability | Stability (Dutch) | Movement |
|---|---|---|---|---|
| Longitudinal axis | Langsas | Lateral stability | Dwarsstabiliteit | Pitch |
| Vertical axis | Topas | Directional axis | Richtingsstabiliteit | Yaw |
| Lateral axis | Dwarsas | Longitudinal stability | Langsstabiliteit | Roll |
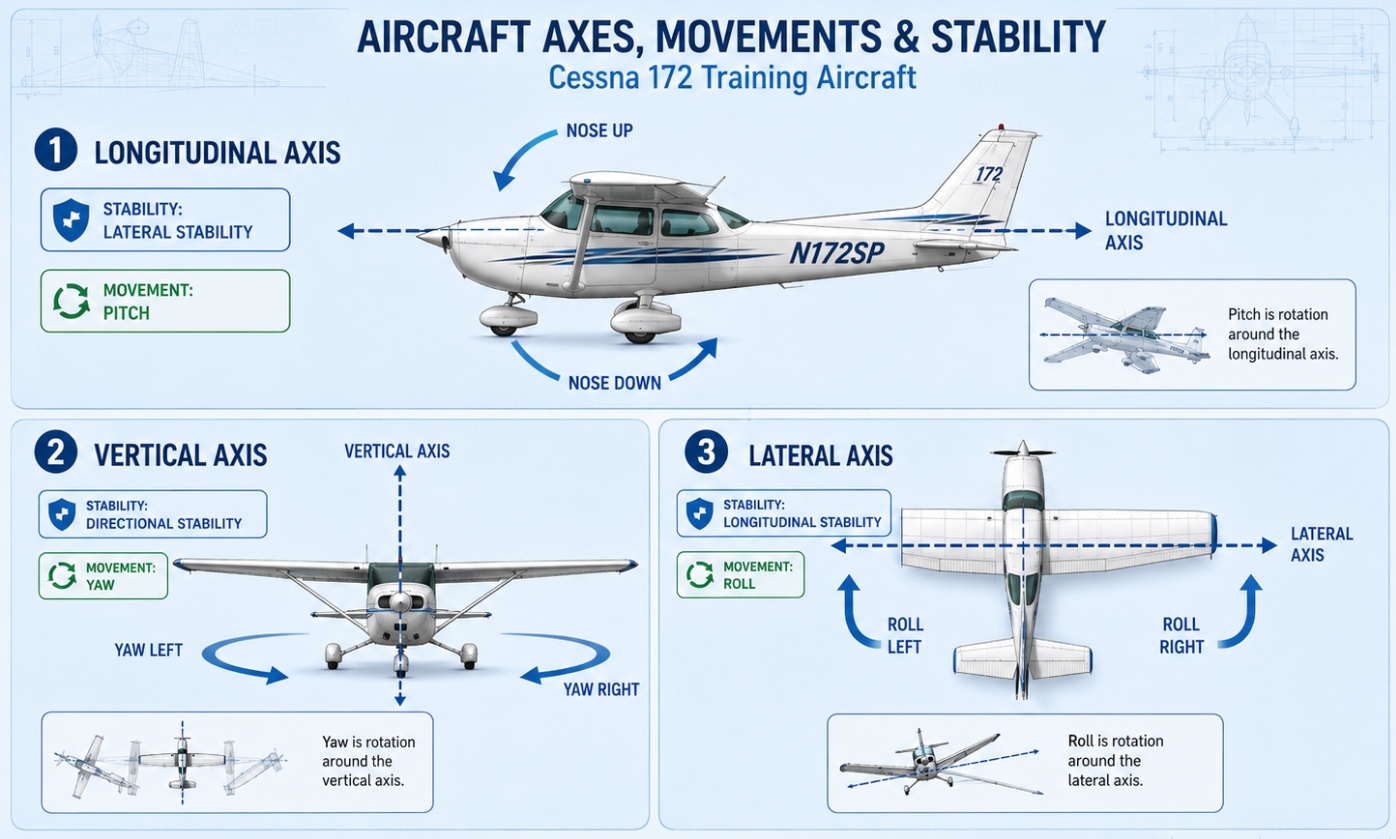
The longitudinal stability is the stability of the lateral axis, the pitch movement. An aircraft is longitudinal stable if the it restores the pitch (AoA) to the state before interruption like minor inputs, wind or turbulence. Planes are designed that the center of gravity (CG) lies in front of the Center of Lift (Center of Pressure). This is by design to make the plane making a nose up movement when throttle is full and a nose down movement when throttle is closed. The slipstream air of the propellor flows over the elevator making it very effective.
To compensate for this moment and to make the plane longitudinal stable, we have the horizontal stabilizer at the tail of the plane. This is basically an upside down wing at the tail of the plane, and is an extra lift factor which makes the plane more stable on the longitudinal axis (langsas).
When the center of gravity (CG) is in front of the Center of Lift, (pressure point), the horizontal stabilizer must do a negative force. Because of the distance between CG and horizontal stabilizer is much longer than between CG and pressure point, a small horizontal stabilizer moment is needed. This distance defines operationally how stable the plane is on the longitudinal axis, the more the CG is up front, the more stable the plane is. If this CG shifts backward, then the stability decreases.
A canard is a set of small wings at the nose of the plane. Some planes counteract the longitudinal stability by shifting the wings somewhat to the back. This creates a more frontal CG in combination with this added set of small wings. These canards always produce positive lift as the AoA is positive.
As the CG has a big impact on the stability of the plane, the allowed position of the center of gravity is strictly limited. This CG must be within a limited frontal and after CG. Exceeding this values can dramatically decrease stability and flight performances.
The most aft limit of the center of gravitity is still in front of the Center of Lift by design, but mind to do your Mass and Balance calculations the right way to prevent those crazy things from happening.
To get enough longitudinal stability, the horizontal stabilizer has a smaller angle of incidence and so AoA. This is done so every pitch change has a bigger effect on the horizontal stabilizer than on the wings. This angle of AoA of the wings and the horizontal stabilizer is called the long-V angle.
This difference in AoA also causes the wings to stall first in high nose up situations, making the elevator still controllable to recover.
The directional stability is the stability around the vertical axis (yaw). If during a flight the air comes straight head-on, the flight will be coordinated. If because of a small yaw imput the air will not come front, a slip occurs. We call the angle between the incoming air and the longitudinal axis the slipping angle.
An aircraft is directionally stable if during a slip it wants to recover itself to be aligned with the incoming air again. This is mostly achieved by the use of the vertical stabilizer. This also gets a different angle during slips, which result in an aerodynamic force from the side making the slip undone.
The distance between the vertical stabilizer and the CG (the arm) determines the directional stability. A more aft-CG will decrease the arm of the vertical stabilizer and making it less effective and so less stable. A more frontal CG does the opposite, increasing the effectivity and stability.
The lateral stability is the rolling-axis stability. An aircraft is roll-stable when it returns to wings-level state after rolling. Just as the directional stability, is the roll stability a result of a slipping movement. Because of this movement another force occurs which restores the balance.
At lighter planes, this stability is reached by placing the wings under an angle of the longitudinal axis like a Piper plane. This is called a dihedral. If the wingtips are lower than the wing-root, then it would be called anhedral.
Such dihedral is dependent of a slipping movement where the airflow comes at an angle. This can happen when a plane rolls, the AoA of the lower wing will increased and the higher wing decreased resulting in a recovery to wings level.
A high-winger like a Cessna 172 has a better rolling stability than a low-winger like a Piper. The cause of this is in the behaviour of the crosswind-flow when a rolling motion.
The crosswind-flow will be bent off by the fuselage. At a high-winger this results in a bigger AoA of the low wing. This results in more life, pushing the low wing up and be balanced again.
A plane is behaving different when loaded differently. As we have an object that is flying through the air, it needs to be balanced which we do in the mass and balance sheet. It cannot exceed the forward or after limits, but based on how the plane is loaded, it will behave differently.
| Topic | Forward CG | Aft CG |
|---|---|---|
| Aircraft balance | Nose-heavy | Tail-heavy |
| Longitudinal stability | More stable | Less stable |
| Pitch control | Heavier control forces | Lighter control forces |
| Elevator authority | More elevator force needed | Less elevator force needed |
| Stall speed | Higher stall speed | Lower stall speed |
| Take-off/landing distance | Longer | Shorter |
| Landing flare | More difficult to flare | Easier to over-flare or balloon |
| Stall behaviour | Nose tends to drop more naturally | Nose may not drop as readily |
| Stall recovery | Easier recovery | More difficult recovery |
| Spin tendency | Less likely to enter a spin | More likely to enter a spin |
| Spin recovery | Generally easier | May be difficult or impossible |
| Drag | More drag, greater tail-down force | Less drag |
| Cruise performance | Worse cruise performance | Better cruise performance |
| Fuel consumption | Higher fuel consumption | Lower fuel consumption |
| Trim | More nose-up trim usually required | Less nose-up trim usually required |
| Main risk | Aircraft may not rotate or flare properly | Aircraft may become unstable or unrecoverable |
| Summary | Stable but heavy on controls | Efficient but unstable |
You have reached the end of the page. You can navigate through other blog posts as well, share this post on X, LinkedIn and Reddit or return to the blog posts collection page. Thank you for visiting this post.
If you think something is wrong with this post or you want to know more, you can send me a message to one of my social profiles at: https://justinverstijnen.nl/about/
If you find this page and blog very useful and you want to leave a donation, you can use the button below to buy me a beer. Hosting and maintaining a website takes a lot of time and money. Thank you in advance and cheers :)
The terms and conditions apply to this post.
For a live overview of my flight lessons, visit: https://flighttools.justinverstijnen.nl/flightlessontracker
This page can contain a collection of personal notes, steps to remember, finished and unfinished content. Please excuse brevity.
Do not use specific information given like fuel flow, landing/take-off distances for your flights. Always refer to the POH of your exact plane for flight preparation. My information is just for references that I used.
The frame of a plane consists of several parts, which all make flying and steering in the air possible by various actions. I will describe all parts in English and Dutch:
The aircraft itself can be constructed in several different ways. The most important thing here is the type of aircraft. Bush planes are very light and will be less likely to use heavy stainless steel.
We could have two types of wings:
Both of this types of planes have their pro’s and cons. In many Cessna 172 versions, the high-wing fuel tanks allow fuel to flow by gravity. Some aircraft versions and fuel systems can still have fuel pumps, so always check the POH of the exact aircraft. Als we cannot see traffic above us very good in a Cessna, but not very good under us with a cantilever wing.
There are also planes which have a V shaped tail with a rudder and elevator combined. These types of tails are called a ruddervator.
We can have 2 types of tyres on arplanes:
Tyres can slip over the rim during landings, this is the reason maintenance does a little slipmarker on the tyre and rim. This is mostly red. The purpose of this marker is to see within seconds if the tyre has been slipped over the rim during earlier landingd, which comes with possible unclear damage.
The shockdamper of the nose wheel construction works with gas and oil, which have both a unique task:
The gas, usually nitrogen, provides the spring effect because it can be compressed. The oil provides damping because it is forced through small openings or chambers. Oil itself cannot be compressed, but it can control the speed of the movement.
The nose wheel also has:
Hydraulic means transferring pressure by using an incompressible fluid. In aircraft this is hydraulic fluid, not water which properties are that it can be hardly compressed, as a low viscocity and is dangerous for human people to touch with hands and eyes. This fluid is pumped around like a circuit, where the circuit is leveraging the least resistance at the action, like a brake so if you press on the brake pedal, this force is transferred to the brake at the wheel en from there the fluid is pumped pack to the reservoir and the brake pedal.
We can transfer different forces using liquids hydraulically using this formula:
This means that, at the same pressure, a larger surface area gives a larger force. Liquids are a great way to transfer force, as fluids can hardly be compressed compared with air.
Hydraulic liquids properties are:
Much systems in an airplane works with hydraulic systems, like:
Brakes are systems built on the axes of the airplane to brake it, to lose power. This process converts the kinetic energy of the plane into energy in the brakes, which is warmth. Brakes are mostly powered using hydraulics.
As we don’t want ice on our plane or in parts of the plane, we have ice-preventing systems as we know two different categories:
Both systems are being used to battle ice during flights.
There are situations that fire and smoke can happen in the cockpit. Let’s dive into the different scenarios.
During starting the engine, engine fire can happen. This is mostly because of overpriming the engine, having way too much excess fuel that ignites instantly. Also priming with the throttle which pumps fuel into the carburetor, increases the chance of engine fire.
The actual procedure to follow during this situation is specific to your aircraft but the base is something like this:
If engine starts:
If engine does not start:
Smoke can happen in the cockpit due to several causes:
To correctly battle these situations, we must first know what to do exactly in each situation. These are described in the POH of your aircraft. For fires in flight, a CO2 extinguisher is the best option.
Maintaining a fire is done by having these three components:
By taking away only one of these three components, the fire will extinguish. We have four types of fire with possible extinguish methods:
Water based extinguishers are not that practical for electrical and type B fires. Water is heavier than fuel. Also, Halon extinguishers are very poisonous so good ventilation is needed when using these. This also counts for CO2 type extinguishers, which are generally not for closed environments.
In planes, the most used engine type is a four-stroke (viertakt) gasoline engine. Four strokes means that the engine uses 4 strokes to complete the fuel burn process. The engine is obviously the most important part of getting the propellor to turn.
The engine has the following parts:
| Dutch term | English term | Explanation |
|---|---|---|
| Carburateur | Carburetor | A part of the engine that mixes fuel and air to create the correct fuel-air mixture for combustion. |
| Inlaat | Intake | The part of the engine where the fuel-air mixture enters the cylinder. |
| Inlaatklep | Intake valve | A valve that opens and closes at the correct moment to let the fuel-air mixture flow from the intake into the combustion chamber. |
| Uitlaat | Exhaust | The part of the engine where the burnt gases leave the cylinder and are guided toward the main exhaust system. |
| Uitlaatklep | Exhaust valve | A valve that opens and closes at the correct moment to let the burnt gases leave the combustion chamber through the exhaust. |
| Bougie | Spark plug | The part that ignites the fuel-air mixture by producing an electrical spark. |
| Nokkenas | Camshaft | This part is connected to the crankshaft by gears or a timing system. It controls when the intake valve and exhaust valve open and close. In a four-stroke engine, the camshaft rotates at half the speed of the crankshaft. |
| Cilinder | Cylinder | The cylinder is the main chamber in which the piston moves up and down. Combustion takes place in the upper part of the cylinder. |
| Verbrandingsruimte | Combustion chamber | The area where the fuel-air mixture is compressed and ignited. This is where combustion takes place. |
| Zuigerveren | Piston rings | Rings attached around the piston. Their purpose is to seal the combustion chamber from the rest of the cylinder and to help control oil. |
| Zuiger | Piston | A moving part inside the cylinder. It is connected to the crankshaft through the connecting rod and transfers the force from combustion into mechanical movement. |
| Drijfstang | Connecting rod | The part that connects the piston to the crankshaft. It transfers the up-and-down movement of the piston to the crankshaft. |
| Krukas | Crankshaft | The crankshaft converts the up-and-down movement of the piston into rotating movement. In an aircraft engine, the propeller is connected to the crankshaft. In a car, the crankshaft ultimately drives the wheels through the drivetrain. |
| Carter | Oil sump / oil pan | The lower part of the engine that contains engine oil. It stores oil that is used to lubricate the moving parts of the engine. This can be a wet sump or a dry sump system. |
| Krukkast | Crankcase | The central housing of the engine. It contains and supports the crankshaft and often also parts of the camshaft system. At the bottom of the crankcase there is usually an oil sump or oil pan, which contains engine oil. |
Burning fuel in a 4 stroke engine is completed in 4 different phases:
There are multiple types of motorshapes. In planes, the most used shapes are:
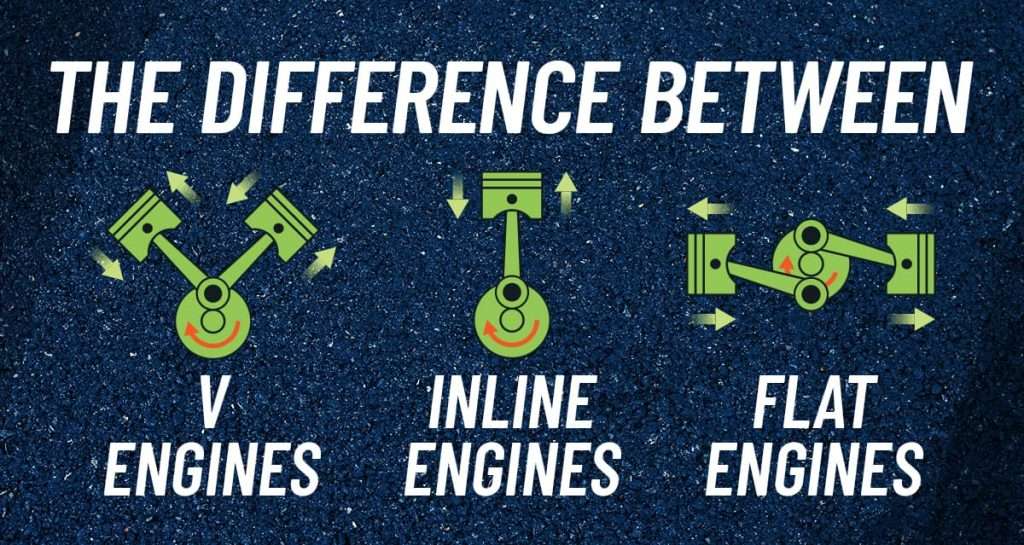
The units which can be used to measure engine power are mostly indicated in Horse Power (HP/pk). This is a worldwide standard, but sometimes the actual measurement method is described. Sometimes BHP % is used in the POHs of the aircraft. The method to measure is a special installation connected to the crankshaft, and measuring the force needed.
We also have an indication of how long you may use full engine power. The indicator for maximum continious power is the maximum power you can use unlimited. In fixed-pitch propeller aircraft, RPM gives an indirect indication of engine power. In constant-speed propeller aircraft, power is normally managed using manifold pressure and RPM together.
At bigger heights, like from 3000ft, we need to pull somewhat on the mixture handle to reduce the amount of fuel going into the engine. At bigger altitude, the process is more inefficient when putting too much fuel into the engine.
The power of a piston engine depends on the air density. This is depending on the pressure, temperature and humidity. At a low air density
Turbo-engines can be described in different ways:
A turbo system is basically a turbine and a compressor. The turbine is driven by the exhaust gasses and is connected through an axis with the compressor which is placed in the air inlet system. The compressor will increase the pressure of the intake air, resulting in a higher manifold pressure. This increases the motor-power. Turbine compressors rotate at a very high RPM, around 80.000 RPM to 100.000 RPM in some cases.
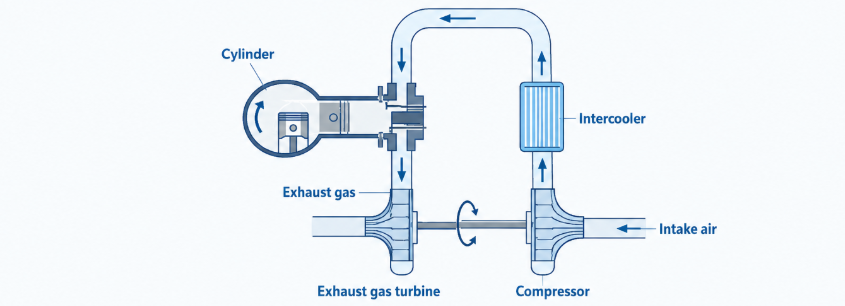
The schematic drawing of a turbine-compressor combination.
As a result of the compressed intake and the flow of hot exhaust gasses, the temperatures of a turbo will increase very high. Turbo’s can even be glowing red. Turbo engines therefore often have a intercooler, which cools the compressed intake air before it enters the engine. This is similar to a radiator. Turbo engines also need some minutes of stationary running before shutting down to completely cool down.
A waste gate is a valve in the exhaust system where part of the exhaust gases can bypass the turbine to control turbocharger speed and manifold pressure. Some engines have a automatic waste gate function, in these type planes you can use full power on sea level.
There are also planes with multiple engines. They have engines which have separate systems to power and provide fuel to those engines. This is by design to minimize the chance of having both engines to be in error at the same time.
The fuel system and parts of aircraft are categorized into two categories:
The fuel system can consist of the following possible parts:
Fuel tanks are very often located in the wings, but can also be in the wingtips or fuselage parts.
The goal of the fuelsystem is to drive fuel to the carburetor, where the fuel and air mixture is created before being ignited in the cylinders. If fuel tanks are located above the carburetor, like in many carbureted Cessna 172 aircraft, fuel can flow due to gravity feed. Some aircraft versions, especially fuel-injected versions, can still have fuel pumps, so always check the POH.
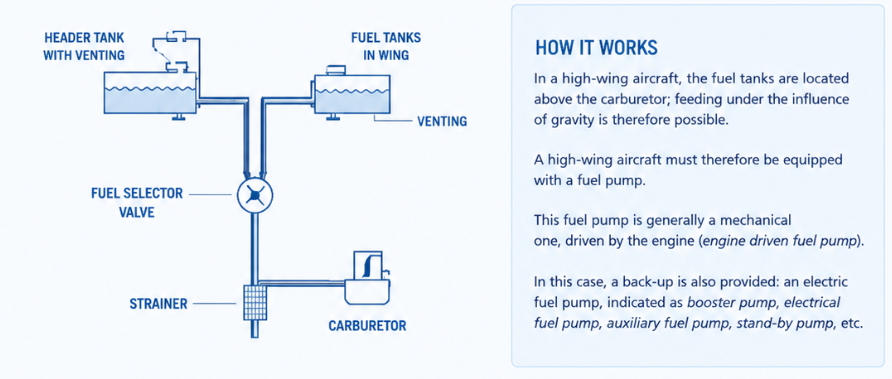
On planes where the fuel tanks are on the same level or lower than the carburetor, the fuel needs a pump to do the work. This pump is mostly driven mechanically by the engine. For backup purposes, in most cases we also have a electronic fuel pump which is often called a stand-by pump or auxillary fuel pump.
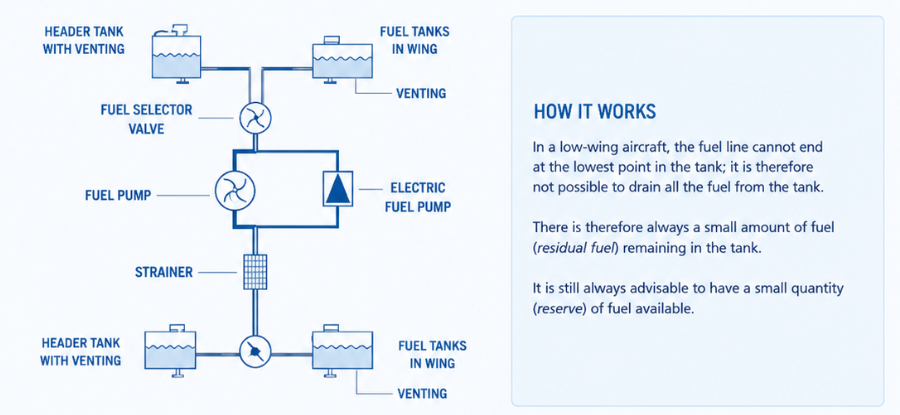
The fuel output point in the fuel tank is in most cases at the lowest point of the tank. However, we lose some part of the fuel making the difference between all fuel and unusable fuel. On the Cessna 172, we lose around 1,5 USG because of this. The pro of this is that possible dirt and other contamination is sinking to the bottom and not injected into the fuel system.
Fuel tanks have a venting system to maintain atmospheric pressure in the tank as fuel is used and as pressure or temperature changes. This is very critical at high-wing planes to ensure fuel always flows to the engine due to gravity. If the vent becomes blocked, a vacuum can form in the tank and fuel flow to the engine can be restricted or stopped. Types of venting are:
Fuel tanks also have a drain at the bottom side, which can be used if any contamination or water is in the fuel and the color can be checked. Here we also have a strainer where water and contamination can be removed from the tank.
Vapour lock is a phenomenon where fuel vapour bubbles occur in the fuel lines, making the fuel flow very hard or sometimes even impossible. It can be caused by high temperatures, low pressure in the fuel system, or fuel with a higher vapour pressure. To solve vapour lock, turn on the electrical fuel pump and/or enhance engine cooling, according to the POH. Using Mogas fuel can increase the chance of vapour lock compared with AVGAS. The chance of this happening is therefore higher on hot summer days.
Fuel selector valves are being used to select where the fuel comes from. By setting this switch, you actually turn a mechanical valve to decide the flow of fuel. In most cases, we set this on both (if applicable) but in some cases to check or to balance the fuel in both tanks we select one of the two tanks only.
In a piston engine, the fuel filter is placed between the tank and the fuel pump/primer so the fuel is cleaned before it reaches sensitive parts.This protects the fuel pump and primer from dirt, rust, water, or debris coming from the tank. If the filter were placed only after the pump, contaminated fuel could already damage or block the pump. Clean fuel also helps prevent blocked primer lines, poor starting, rough running, or fuel starvation. So the main reason is protection and reliable fuel flow to the engine.
To let a piston engine work, the mixture of fuel and air must be optimal before being delivered to the cylinders. This mixture can be made using two different systems:
In the carburetor, air and fuel are mixed into a optimal ratio and then will be delivered to the engine cylinders. The carburetor consists of a pipe with a narrowing, the venturi, and a throttle valve which you control with the throttle handle in the cockpit. In the venturi is a sprinkler which is connected to the float-chamber. This system is also called a updraft carburetor
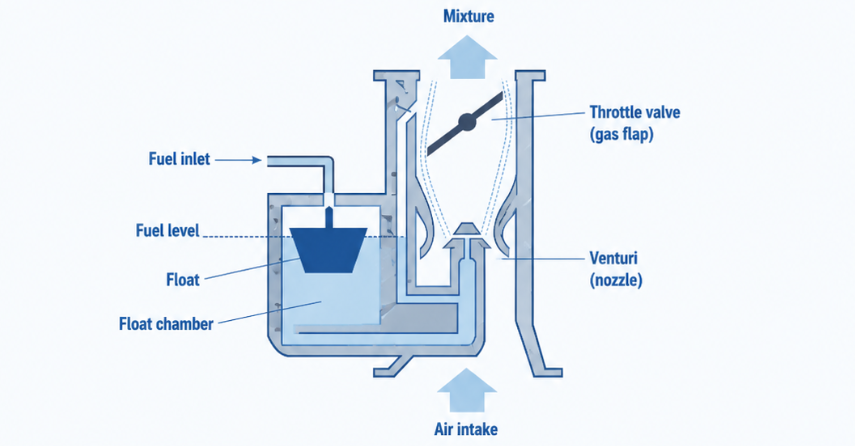
Chemically, combustion is a reaction of a particle with oxygen. To start a combustion, fuel must be combined with air in a specific ratio. When one of both is too less, no combustion can happen, so the combustion area of an engine is within a certain area.
For gasoline, the chemically ideal mixture is about 1 part fuel to 14,7 parts air by mass. This is called the stoichiometric ratio and is about 6,4% fuel by mass.
In engine descriptions, the version with the ratio is almost always used as where the percentage does make more sense. We need to control the mixture because we can fly in air with a lot of air molecules close to the ground but also in air high up with way less molecules. In real engine operation, the mixture is not always kept exactly at 1:14,7. For high power settings, a richer mixture is often used for power and cooling. In cruise, the mixture can be leaned according to the POH and engine limitations.
The carburetor contains some additional parts to make it work as expected:
Air normally reaches the carburetor through the engine air inlet system. This inlet is located at the front of the aircraft, just below the propeller. Before the air reaches the carburetor, it passes through an air filter. This inlet or filter can become blocked by debris, grass, snow, ice, or other contamination, which is why inspecting the air inlet and filter area is part of the preflight inspection.
On carbureted Cessna 172 models, an alternate source of air is provided through the carburetor heat system. When the carb heat control is pulled in the cockpit, a valve in the carburetor air box changes position. Instead of using the normal filtered outside air, the engine draws warmer, unfiltered air from around the exhaust heat muff.
This warm alternate air helps prevent or remove carburetor ice. It can also allow the engine to keep running if the normal air inlet or air filter becomes blocked. However, because the air is warmer and less dense, using carb heat usually causes a drop (~10%) in engine power and RPM. Therefore, carb heat should be used according to the aircraft checklist and operating procedures.
The moisture in the air can freeze in the carburetor if the temperature there is below 0 degrees. The temperature in the carburetor is always lower than the outside air temperature, because of the following reasons:
This is the reason we use carburetor heat according to the POH/checklist. In my flight lessons, the practical rule is to use carb heat when reducing power below 2000 RPM, except on the ground:
Carb icing can happen at any outside air temperature, even on hot and sweaty days:
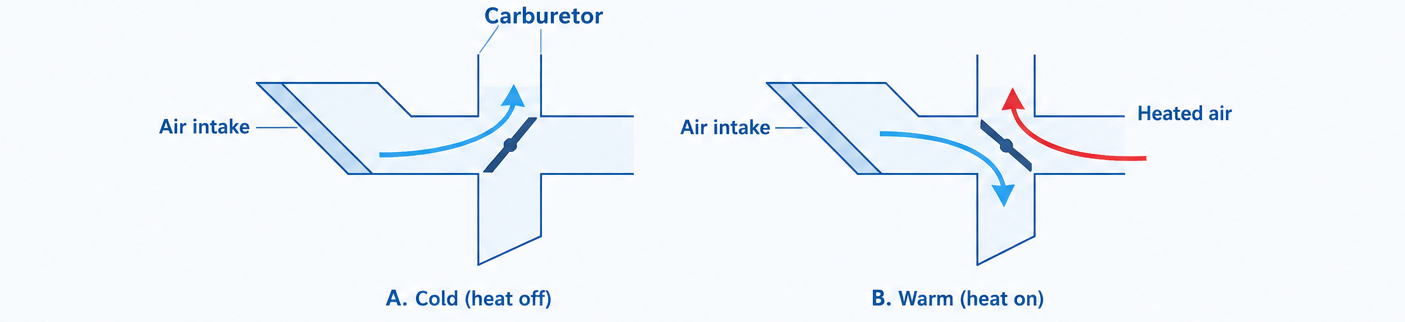
We check carb heat during the before take-off checklist by setting the RPM as specified in the POH, often around 1700 RPM, and then selecting carb heat ON.
During the flight, we can recognize carb icing due to these causes:
Other rules about the Carb heating system are:
Carburetors have two important downsides:
These problems can be solved by using fuel injection. This system, which is available in modern aircrafts, has an injection in every cylinder controlled by a fuel control unit in between.
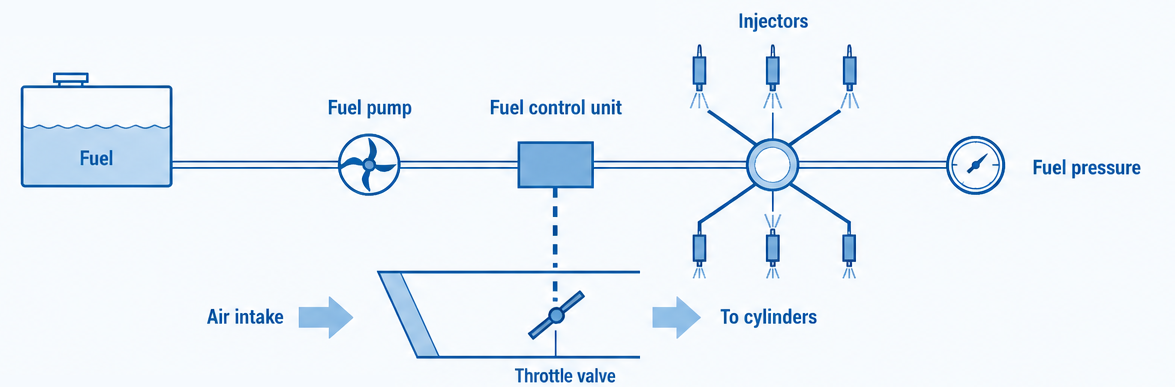
Just like the older carburation system we have a throttle valve, controlling the airflow into the engine. The fuel control unit meters the correct amount of fuel and sends it to the fuel divider and injectors. Most gasoline-based engine will inject the fuel continuously, not only when busy in the intake stage.
Fuel injection systems are always equipped with two possible ways of pumping fuel, which can be mechanical, using gravity or electrical. In the fuel manifold the fuel flow is measured, just like described in the disgram above.
Fuel injection systems are more complex and more expensive than carburetor systems, and they remove the risk of carburetor icing. However, induction icing or intake blockage can still be a risk, so some aircraft still have an alternate air system.
In aviation we know three types of fuel, each for their own cause.
| Fuel type | Description | Used for aircraft type |
|---|---|---|
| Mogas | Automotive gasoline, only usable in aircraft if approved by the engine/aircraft manufacturer or by STC | Some approved piston aircraft |
| AVGAS 100LL | Leaded aviation gasoline, blue in color | Many gasoline piston aircraft |
| AVGAS 91UL | Unleaded aviation gasoline with a lower octane rating than 100LL | Approved gasoline piston aircraft |
| Jet-A1 | Kerosene-type turbine fuel | Jet aircraft, turboprops and some diesel piston aircraft |
An important parameter of fuel for planes is the knock resistance (klopvastheid). Fuel with a low knock resistance can burn under high pressure and normal operating temperature, leading to detonation. This is called detonation and results in a rough running engine.
Most planes can, some with some revisions, run on both AVGAS and MOGAS. The primary reason to use one of the two is the price. At this moment, the prices in the Netherlands are around:
Fluids themselve cannot burn. They first have to vaporize and the vapor needs to have a specific mixture with air to actually burn.
Resistance of two substances can produce a separation of electrical load. If the contact is broken, the two substances keep their electrical load. A plane can be loaded statically by precipitation, dust or sand in the air. This can also happen due to the flow of fuel in the tank installation. A passing thunderstorm can also cause a plane to be statically loaded.
Static energy can also cause interference in radio or navigation systems. To unload the plane from static energy, the plane has some static wicks, paths of low resistance with the air to unload itself which are mostly attached to the elevator and ailerons.
When the plane and tank installation have a different static load, a spark can transfer electrical load between the two objects when they are connected. To prevent this from happening and to send the electrical load directly into the ground, we always connect a plane using the ground wire during tanking operations. This is a wire we connect to a conductive part of the plane, like the nose wheel axis.
Aircraft fuel must be free of dust, water and other particles. When fuel is in the tanks, fuel can be contaminated. This is the main reson to check the fuel for any contamination with a dip stick and the drain. Water is the most occuring contamination and can leak in due to vapor, leakage and during rain. Water and fuel will not merge, and water is more heavy that fuel, so water will drop down and fuel will float on top of that.
Diesel engines are very similar to gasoline engines. An important difference is that the diesel engine doesn’t use spark ignition like gasoline engines. They compress air to a high pressure and temperature, and fuel is injected into this hot compressed air, causing ignition. Diesel engines need a better and stronger construction because of this.
Diesel engines also don’t have a throttle valve in the same way as gasoline engines. Power is mainly controlled by the amount of fuel injected, often electronically by FADEC in modern aircraft diesel engines.
Diesel engines have two engine-driven fuel pumps:
Diesel engines also don’t have mixture handles, but are electronically controlled using FADEC.
After we have discussed the carburetion and injection system of engines, we will now take a closer look at the ignition system of general aviation aircraft. Ignition of the fuel/air mixture is what our propellor causing to turn and giving us thrust.
With gasoline engines, fuel/air mixture is ignited using a spark which is produced by a spark plug using high voltage. This voltage is around 20.000 volts and this voltage is produced by the magneto’s. The goal of the ignition system is to generate high voltage so the spark plugs will spark at the right moment to ignite the fuel/air mixture.
Parts of the ignition system are:
In many general aviation aircraft, the ignition system uses magnetos. A magneto is a self-contained ignition generator that produces high voltage for the spark plugs as long as the engine is turning. This makes the ignition system independent from the aircraft battery, alternator and master switch during normal running. Also we have some redundancy in if there is a problem in the L magneto circuit, we can run on R and still land the aircraft safe and sound. However, using one of two magnetos will result in a ~10% performance loss.
The magnetos are connected with gears to the crank shaft, the main shaft of the engine that rotates and is connected to the propellor, and they rotate within a coil. A rotating or moving magnet inside a coil produces electrical current, which is delivered to the spark plugs.
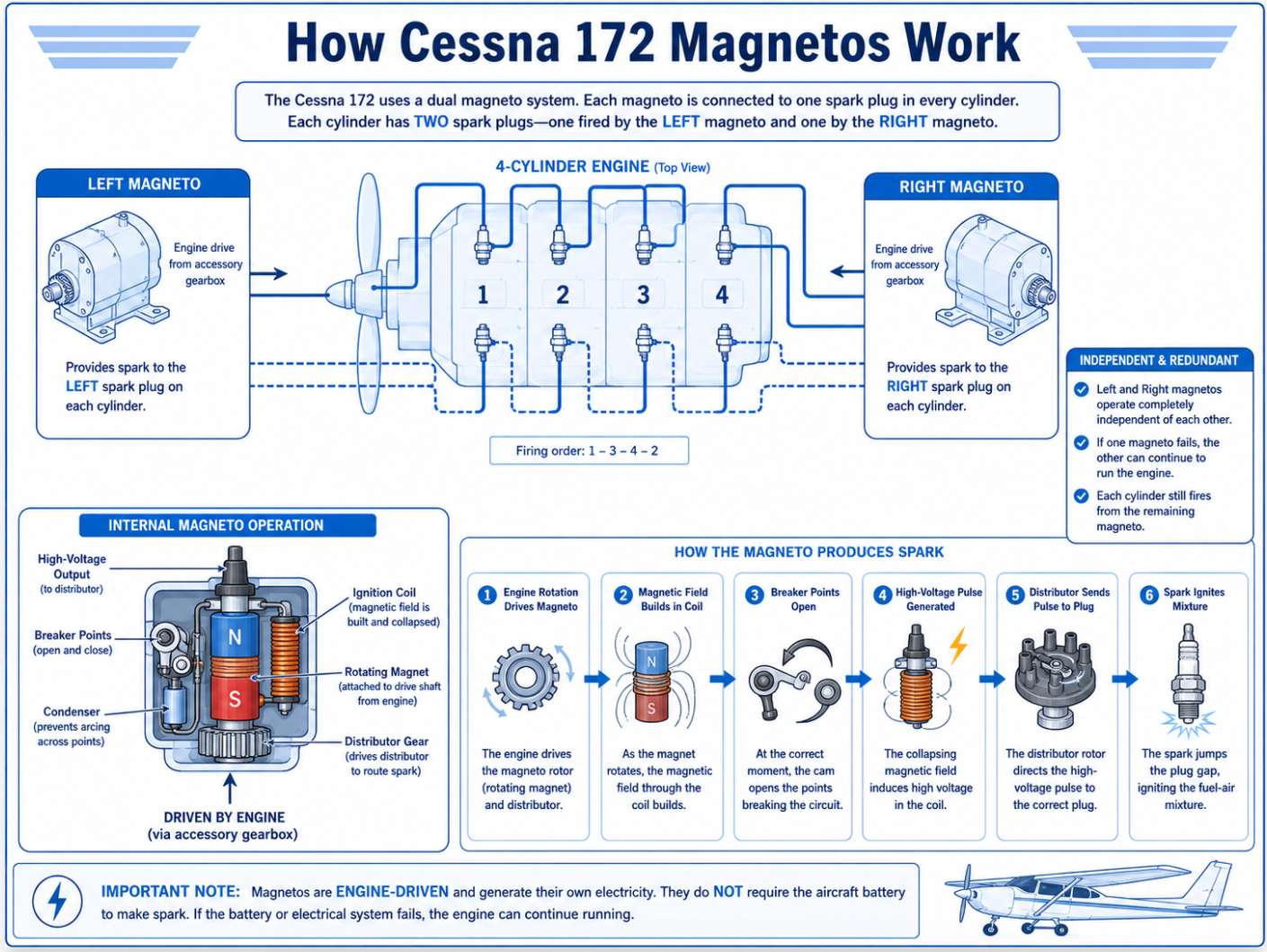
The produced voltage is dependent of the turning speed of the magnet. How faster the engine runs, the more voltage is produced. When starting, the magneto turns slowly and would normally produce a weaker spark. An impulse coupling, often installed on the left magneto, stores spring energy and releases it suddenly. This makes the magneto rotate faster for a moment and retards the spark timing, helping the engine start more smoothly.
A plane which has its contact not set to off runs in standby, and a minor movement in the propellor can result in the engine running. This is called hot prop. Always set the contact to OFF and the mixture to Idle cut-off when parking a plane.
An alternative solution to the impulse coupling is an electrical starting vibrator or shower-of-sparks system. This uses battery power to provide a series of sparks during engine start, but it depends on sufficient battery power.
The ignition must happen on the right moment to be effective. If the fuel/air mixture is not ignited at the right moment, this will work against you instead of helping you further.
Some causes of detonation are:
A spark plug that has the right working temperature, will clean itself and will be free of carbon or lead. With running stationary for a long time, the optimal temperature will not be reached and can result in the engine running too rough. This is the reason we set the engine for around 1000 rpm during taxi and stationary, which is higher than the complete idle RPM, which is around 600-650RPM.
Diesel engines doesn’t have spark plugs. Diesel engines will suck air and compress this. At the end of the compression stage the diesel will be injected into the cylinder, causing it to ignite due to the high pressure and temperature. Mostly similar to gasoline-driven engines but doesn’t have spark plugs.
General aviation planes have a ignition switch where we control the ignition system with. This mostly have 5 different modes:
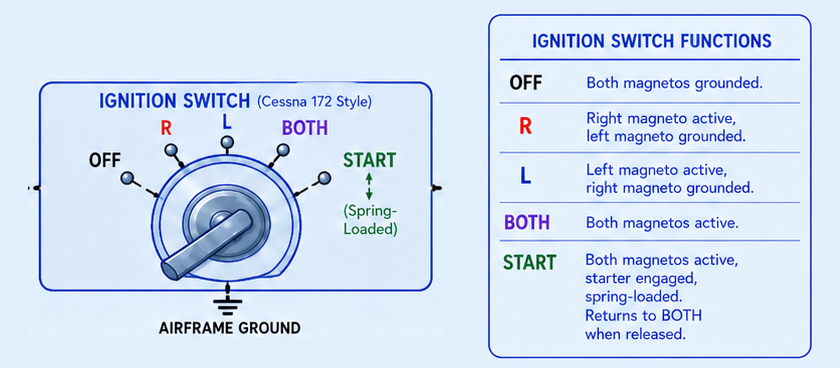
During the before take-off checklist, we test the magneto’s on working and stability. If one of the two is not working properly, we will confronted with this at this moment. If the engine is running on one of the two magnetos, we should get a ~10% RPM drop. If one magneto is defective, selecting that magneto can cause a large RPM drop or the engine may stop. If there is no RPM drop at all when selecting one magneto, this can indicate a grounding problem, meaning one magneto may still be live when it should be switched off.
A magneto can also be defective due to a grounding problem. During the run up, we will not see an RPM drop on one of the two separate settings. This can make the plane dangerous, and we may not park this plane without a good indication mark, as the magneto’s will be still powered. Rotating the prop even a bit can result in a possible engine start which a person will not survive. This will be minimized by disabling the engine using the mixture to idle, where no fuel is left in the cylinders and nothing to burn. This is the standard accepted way to turn off an airplanes’ engine.
When burning fuel, a huge amount of heat is produced. As this will increase at higher RPMs and higher throttle settings, the engine needs to be cooled. Proper engine cooling extends the lifetime of an engine. At the best working temperature, the engine runs optimally which we want. We then get the most out of the engine. Other cons of high engine temperatures are thin or burnt oil, defective pistons, spark plugs and such.
In general aviation aircraft, these types of engine cooling is being used:
Most aircraft use air cooling or a combination of both. Liquid cooling is often used for cylinder heads and with diesel engines.
Apart from the cooling system, excess warmth is also dispatched through oil and oil coolers. A richer mixture can help cool the engine because some excess fuel evaporates and absorbs heat. This is mainly relevant at high power settings, but mixture use must always follow the POH.
The cooling with air is very easy on airplanes. As air will flow through the openings at the front when flying this already has a major impact. The propellor also blows some air into the inlets at the front. Inside, most parts are equipped with big metal parts which pickup most of this air to cool and conduct the heat out. Most parts have cooling fins, making the contact-surface bigger and better cooling. Inside the engine compartment, some baffles (leiplaten) are added to redirect the airflow for optimal cooling.
Optimal cooling of the engine is reached during the cruise phase, as this redirects the most air at the highest speed into the air intakes. During climbs or running stationary the cooling will be worse.
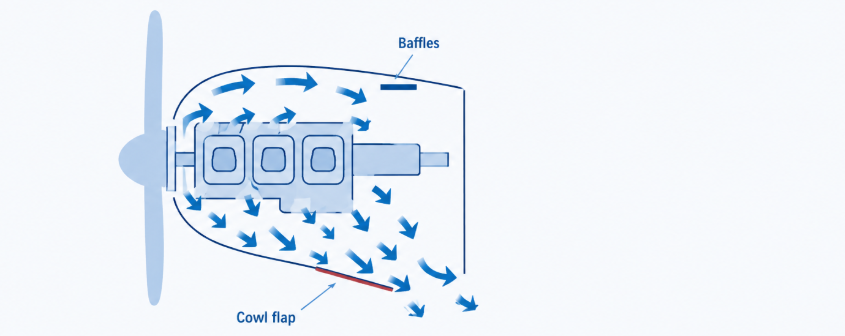
Cowl flaps control the airflow through the engine cowling by changing the outlet area. Open cowl flaps increase cooling airflow but also increase drag. These are often used in turbo-compressor engines. These are mostly open during taxi, take-off and climb and closed on cruise. Then re-opened at landing. If a plane has any problems with cooling in cruise, they can be re-opened.
An engine can also be cooled with liquid. Liquid can reach places with tubing where air cannot flow through. However, this is another extra reservoir, radiator and pump which can be defective. Liquid cooling is also more stable, and the radiator will only be opened when the cooling liquid reaches around 80-85 degrees celcius. Also the liquid will expand when being warm and contract when its cold, so an expansion reservoir is also installed.
An engine needs to be lubricated using oil. The oil has these primary functions:
We can use oil in two separate ways to get oil at the right places where engines can use both simultaneously:
In airplane engines, we can use two different oil circulation systems:
To cool the oil and regulate the temperature of the oil we have a oil cooling system, equipped after the oil pump, before the oil is pumped into the engine. This cooler is a thermostatic temperature regulator which is cooled by the cooling air which flows in the engine compartment. This also works with a bypass system, redirecting directly or via the cooling compartment. If the oil pressure is high, this will also open to always have oil in the engine.
The oil filter is a paper filter in a metal case, around the size of a can of soda and is replaced according to the aircraft or engine maintenance schedule. In many training aircraft this can be around 50 flight hours, but the exact interval must be checked in the maintenance manual.
Oil consists of hydrocarbons and needs additives to lubricate the engine in a broad working temperature range. A cold engine needs to have the same lubrication as a warm engine. Oil has the following properties:
In plane engines, we use both single grade and multigrade oil types. Single grade has big difference in temperature ranges and multigrade is “graded” for multiple temperature ranges. In warmer conditions, an oil grade suitable for higher operating temperatures is often required. In colder conditions, thinner or multigrade oil can help during cold starts.
The indication is:
Multigrade has the gradation in the name. During cold operations, the first number with the W describes the cold-temperature viscosity behaviour. At normal engine operating temperature, the second number describes the viscosity behaviour. In this number, the W stands for “Winter”, so Viscocity 15 during Winter (cold start) and 50 during engine operating temperature.
In the oil system, the oil pressure is regulated by the oil pump which is directly driven by the engine. The oil pump delivers pressure at a very low temperature. To prevent the pressure exceeds the limits during high RPM situations, the engine contains a pressure relief valve. Via the pressure relief valve the oil will be pumped back to the carter. This flap will open at a certain pressure and stabilizes the oil pressure.
The most important indicator of the oil system is the oil pressure meter. A minimum pressure is needed to take care of having enough oil in the engine and enough cooling and lubrication.
The normal and allowed ranges and limits are described in the POH. On the indicator, we get a good view of what is normal, too high or too low.
Too low and too high oil pressure can have similar causes, so let’s sum them up in a table:
| Cause | Too low pressure | Too high pressure |
|---|---|---|
| Wrong oil | Too thin | Too thick |
| Too low oil value | Yes | No |
| Oil temperature | Too high | Too low |
| Blockage in the oil system | Yes | Yes |
| Defective oil pump | Yes | Yes |
| Defective indicator | Yes | Yes |
| Defective oil pressure relief valve | Yes | Yes |
A high oil pressure can happen if the engine is just started and cold. The oil is too thick and will be pumped hardly into the engine. When the engine has warmed up the viscocity will lower and the oil pressure will be within normal operating ranges. An engine takes around 10-20 minutes to fully warm up every component.
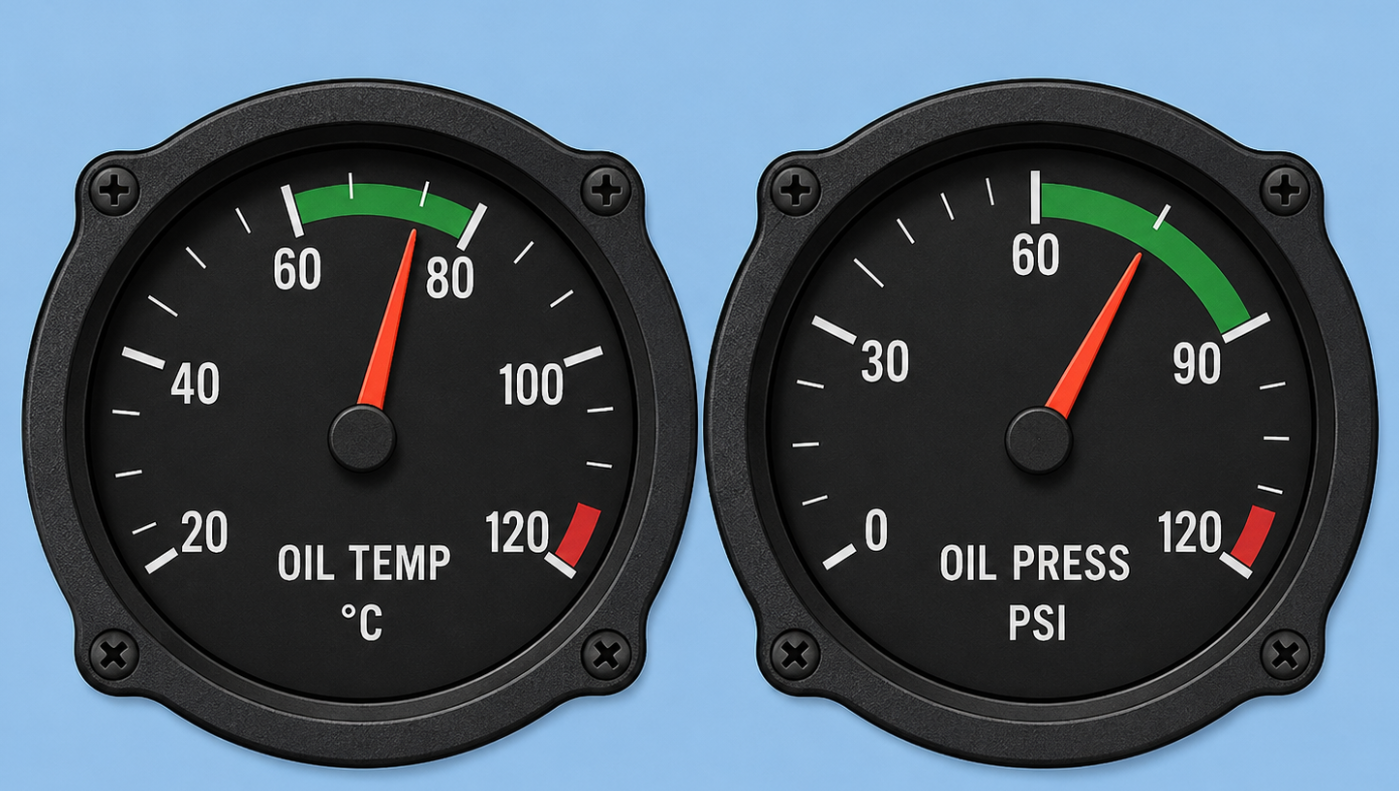
Next to the oil pressure, the second most important indicator of the engine health is the temperature. The temperature will decide the viscocity and the lubricating properties of the oil. High engine temperatures can be caused by:
The oil temperature is dependent of the operating temperature in the engine. If this temperature is too high, then we can take some steps to try and resolve this high temperature by picking less RPM, flying faster for more and better airflow, riching the mixture or to open the cowl flaps.
High oil temperatures often happen with low pressure. By the high pressure, the pressure drops as the oil gets thinner. If the engine cooling is enhanced, the temperature and pressure will be normalized.
Every engine will use oil but the amount of oil is dependent on several factors. The oil usage will be dependent on:
A new engine which doesnt have already lubricated piston rings uses more oil. The same counts for older engines with much wear to the piston rings.
Constant Speed Propellors or variable pitch propellors are propellors where the angle of the propellor blades can be adjusted based on the phase of flight. Planes with this feature are equipped with a blue Prop RPM handle in the cockpit, next to the black throttle and red mixture. Pro’s of planes with this feature is that they are much more efficient, generating more thrust with less engine RPM. With the black handle, we control throttle/manifold pressure, and with the blue handle we select the propellor RPM. The governor then changes the blade angle to maintain the selected RPM within the operating limits.

Planes equipped with constant speed propellors are also equipped with a governor. This is a part in the plane that actually sets the correct propellor blade based on the handle setting.
As the propellor governor tries to maintain the selected RPM, the angle of attack and drag can reduce when in horizontal flight as we go at a faster airspeed. This makes the plane setting a more coarse blade angle to increase this, making the engine run on lower RPMs than with fixed pitch propellors and having more control + efficient use of engine power.
Most blade-change systems are hydraulic, but some are also powered electrically. Hydraulic systems make use of the oil pressure to control the mechanism, so this also uses engine oil.
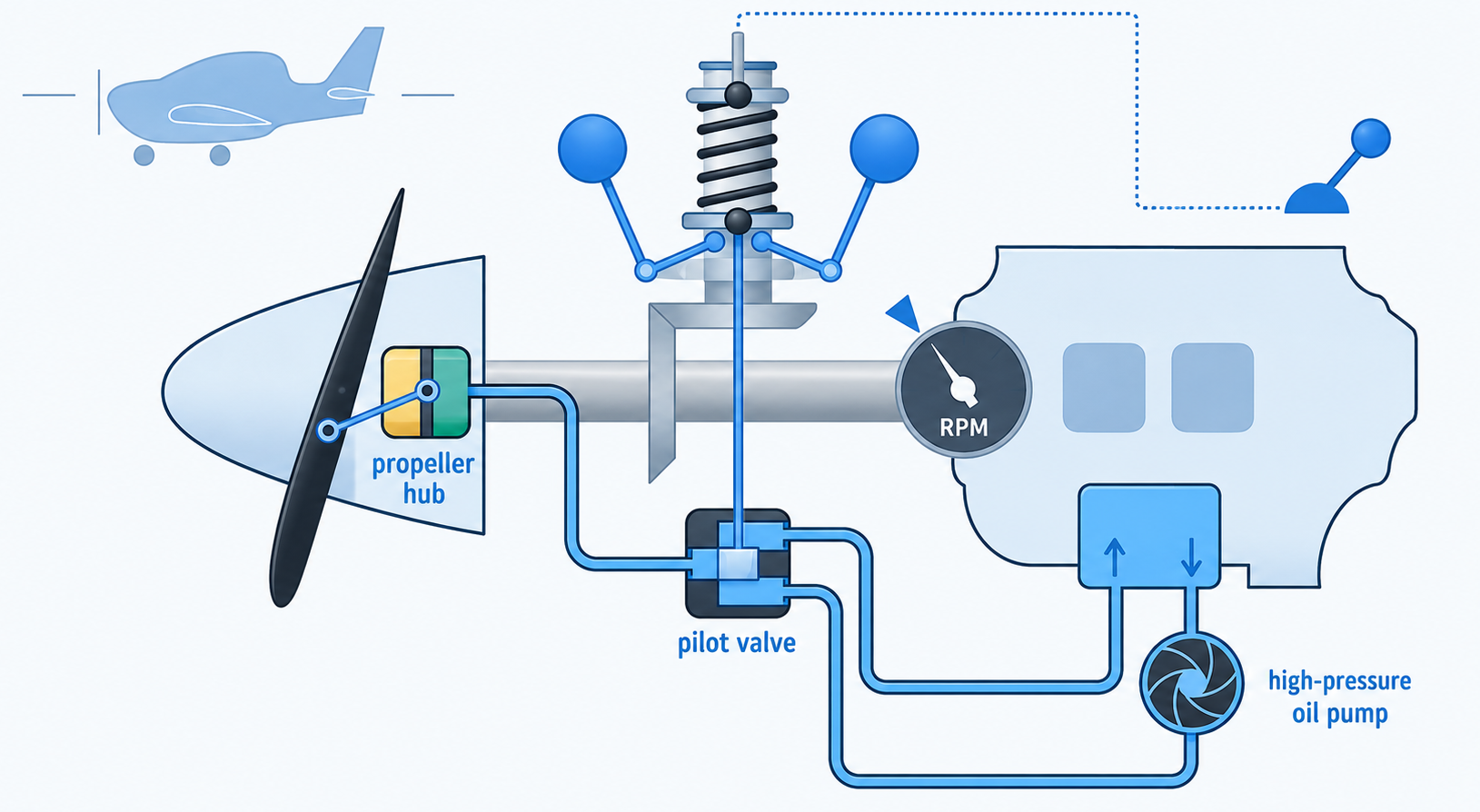
How this system works:
When a high manifold pressure is combined with a low engine RPM the engine can fill up the cylinders too much, causing extreme pressure and temperature in the ignition space and can overload the pistons and crank shaft. This also increases the chance of detonation. Refer to the POH of the plane for recommended setting combinations. A simple comparison is driving a car in a high gear at low speed and pressing the accelerator hard. The engine has to work very hard at low revs.
During the pre-flight check, we will check the governor operation. This can be done when the engine is running and when it is in normal operation temperature. We will set the handle over the full range for a few times and check if the RPM changes value. Doing this multiple times helps warm engine oil reach the propellor governor system and confirms that the RPM changes as expected.
Smaller planes are often equipped with single acting variable pitch propellors, where the blade angle is controlled one-way with oil pressure. The oil pressure ensures a coarse blade angle where centrifugal forces will ensure a fine pitch angle.
As we already discussed, when powered hydraulically, the system uses the engine oil to function. The pitch of the blades is mechanically limited to help us in failures. In many single-engine, non-feathering constant-speed propellors, loss of oil pressure drives the blades toward fine pitch/high RPM, making it behave more like a fixed pitch propellor and keeping us able to land safely. This also needs a limited airspeed and limited engine RPM setting as the engine RPM can now be exceeded by the low propellor drag.
In an aircraft with a constant-speed propeller, engine RPM is controlled by the propeller governor, so RPM is not a reliable guide for leaning the mixture. Instead, the Exhaust Gas Temperature (EGT) indicator shows how hot the combustion is, which helps you find the correct fuel/air mixture. As you lean the mixture, EGT rises until it reaches peak EGT, then starts to fall. Pilots use this indication to set the mixture either near peak EGT or slightly rich/lean of peak, depending on the engine manual and operating conditions. The main reason is to get efficient combustion while avoiding an incorrect mixture setting.
When climbing, and we don’t change anything to the configuration of the throttle, RPM and Mixture, the Manifold Pressure (MAP) will decrease slowly due to the lower outside air pressure.
The engine is of course one of the most important systems in our aircraft. Without the engine we were not able to produce enough thrust to produce lift, and being able to fly. As we have several instruments in the cockpit that tells something about the current state of the engine at any time, we will dive into the properties of each indicator and system.
Let’s take a look at the types of engine instruments we have in our cockpit:
We will dive deeper into the various indication systems and what we can expect from our plane.
All of the indicators in an aircraft are marked with colors to tells us easily if units are within limits or not. Here we can take these into account:
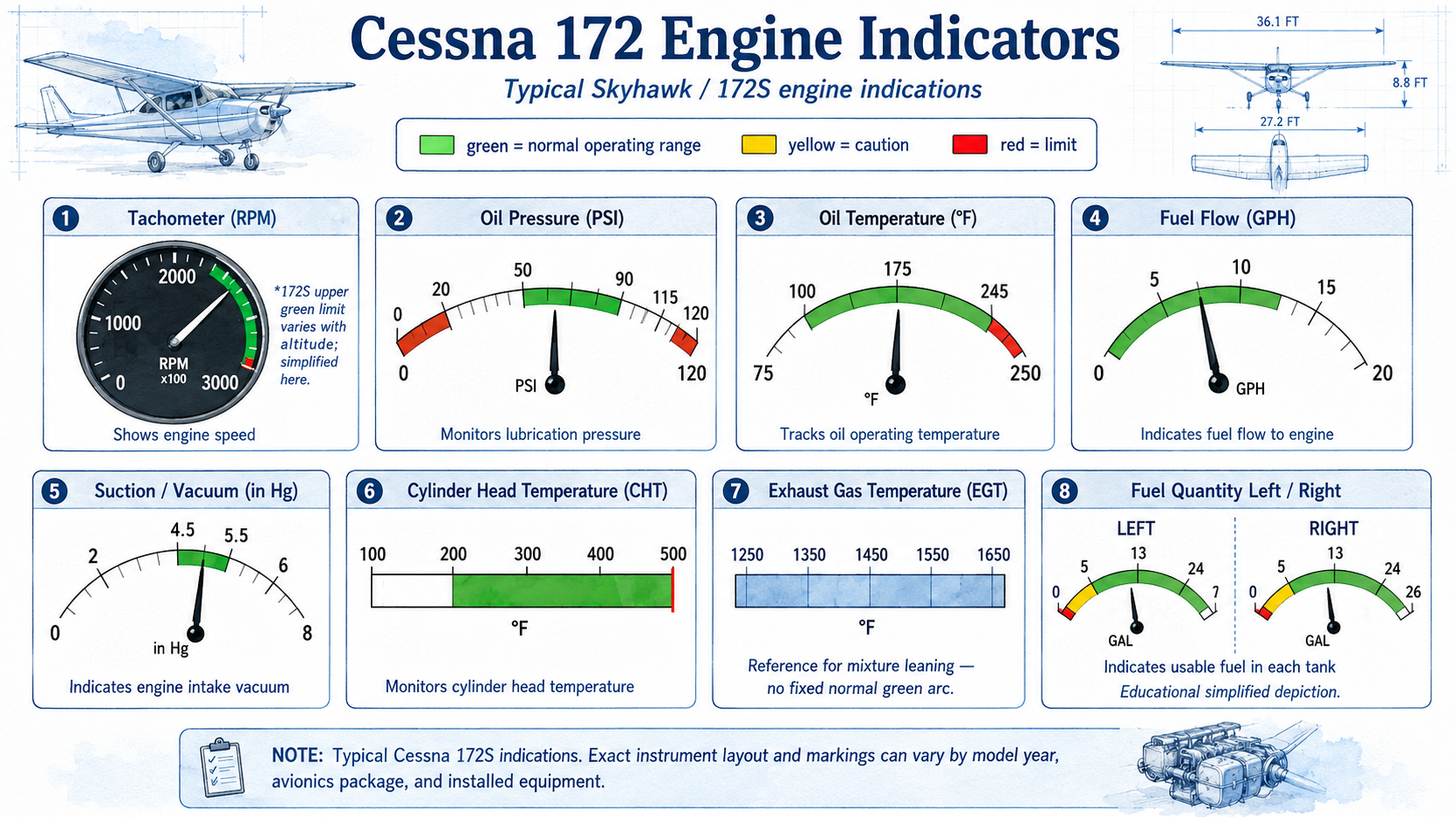
The engine indicators measuring and showing pressure are:
We can indicate pressure primairily with the Pascal unit. One pascal is equal to one Newton per square meter (1 N/m²). In most cases, some older or American units are used in aircrafts:
| Unit | Pascal (1 hPa = 100 Pa) | |
|---|---|---|
| Bar | 1 millibar | 1 hPa |
| Inches of mercury | 1 inHg | 34 hPa |
| Pound-force per square inch | 1 psi | 69 hPa |
Pressure is mostly measured by flexible metal boxes or pipes. We have two types which are mostly used:
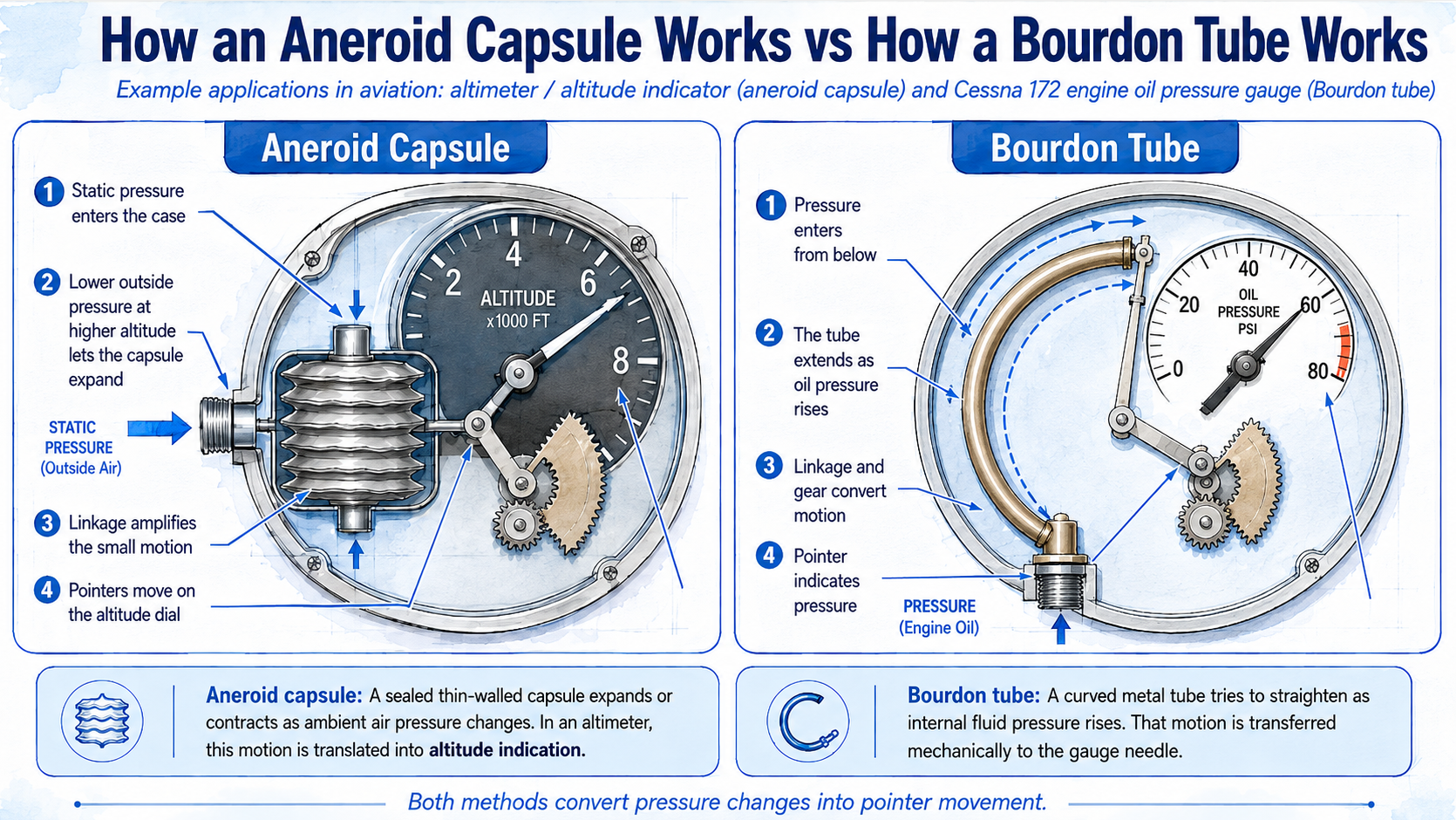
Temperature in aviation is often measured in these three units:
We get some indications about temperatures in our aircraft, telling us different things:
We have one RPM indicator per engine. In a single-engine aircraft we monitor one RPM indicator; in a multi-engine aircraft each engine has its own RPM indication.
RPM indicators show the amount of rotations the propellor makes in a minute. In planes where the propellor is mounted directly on the crank shaft, we also get the RPM of the crank shaft with this indication. With fixed-pitch propellor planes, this means engine RPM equals propellor RPM. More RPM is more power (thrust).
Some engines like Rotax have a gearbox between the crank shaft and the propellor which allows the propellor to rotate at a lower RPM than the engine. Depending on the installation, the cockpit RPM indication may show engine RPM rather than actual propellor RPM.
Propellor RPMs are often limited to around 2700 RPM in many light aircraft engines. The exact limit depends on propellor diameter, tip speed, noise, efficiency and structural limits.
RPM indicators are very often mechanically powered. A flexible cable is connected to the engine on one end. The other end is connected to the RPM indicator in the cockpit. This other end has a magnet connected to it which rotates in a copper tube. This will produce eddy currents, resulting in the copper tube rotating in the same direction. The rotation of this tube is then somewhat limited by a spiral spring.
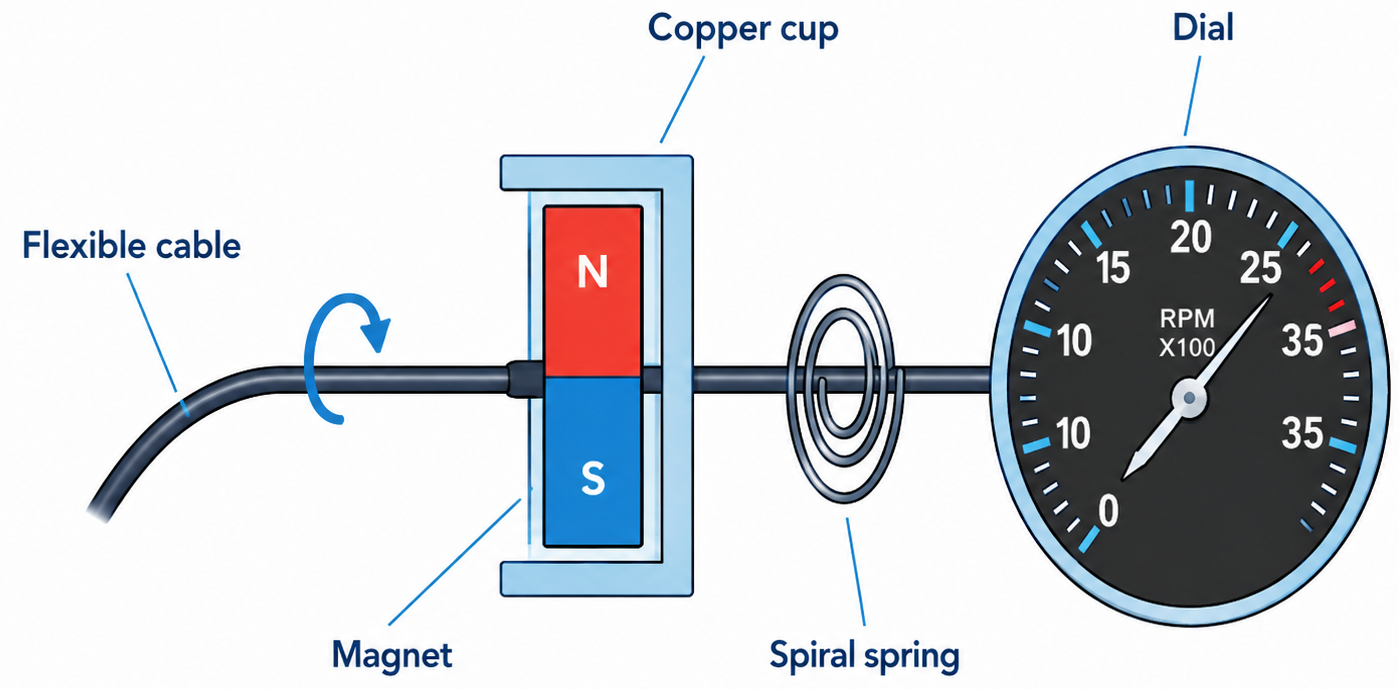
Eddy currents are electrical currents induced in a conducting material when it is exposed to a changing magnetic field, for example by a rotating magnet.
Some planes are equipped with a torque indicator as indicator for the amount of engine power. A torque meter is often used when the crank shaft and propellor are separated by a gearbox and is determined by performing oil pressure measurements in the gearbox.
_Nm = Newtonmeter, unit of rotation power where we multiply the amount of newton against the amount of meters (_10 N × 0,5 m = 5 Nm)
Some planes also show a percentage of the maximum power or the engine power rating (EPR), but this is mostly used on Jet airliners.
The engine indicators measuring and showing properties about the fuel are:
To calculate different units:
Tip: Use this unit conversion tool: https://flighttools.justinverstijnen.nl/unitcalculator
The electrical system in planes is being used to power the electronic devices and instruments. The electrical system and the engine are connected through several systems, such as:
All the primary components of the electrical system are (and fail in case of electrical failures):
All devices which we often use are powered by this electrical circuit:
Some definitions we must know when talking about the electrical system:
We can have two different types of power, namely:
We use both of these type of power, mostly depending on the king of application. A battery for example always delivers DC power and an alternator can deliver both. However, alternators that deliver AC power are much cheaper so we can convert that power to DC. General Aviation aircraft mostly have a DC power system of 14 or 28 volts.
An electrical circuit conststs of a source of power, like a battery or alternator and one or more users of power, connected by copper wires. Power can only flow if the circuit is closed.
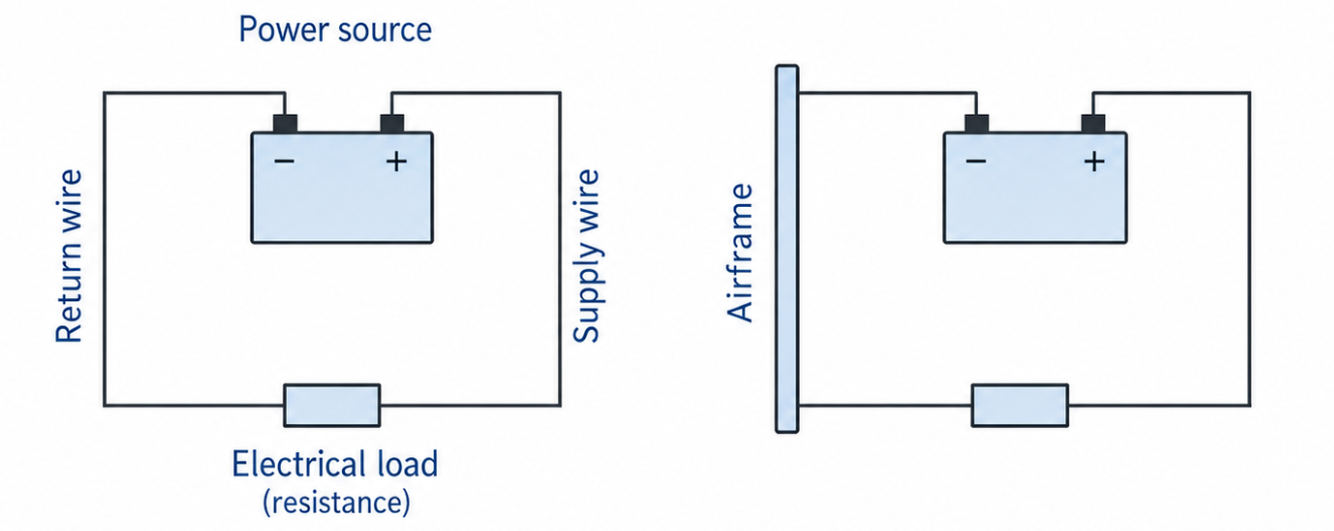
In planes and cars, the negative pole of the battery is often connected to the frame, functioning as common earth. This saves a lot of wire as only the positive pole needs to be connected from the battery to the device and the negative can be picked elsewhere.
The alternator is the primary source of power in an aircraft while the engine is running. The alternator is powered by the engine using the V-string. The battery is used to charge and to power the devices when the engine is not running and to provide power to the starting engine to start the engine and make the alternator work.
I use the word Dynamo here a lot, as this is the Dutch translation and because an generator and alternator are different things. I mean with a dynamo a device that produces power.
A dynamo works by a rotating magnet between static magnets. This causes the rotating magnet to spin at a very high speed, providing power using magnetic induction in a coil.
A DC generator is a dynamo that generates DC power. This works with a stator and rotor, where the stator is a permanent magnet with a rotating coil with a lot of wires. One of the wires is shown in the diagram below:
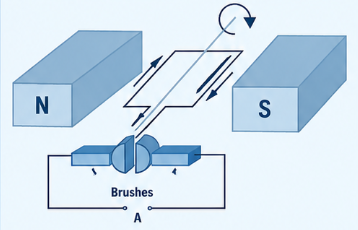
The rotor is connected via the V-string with the engine causing it to rotate as the engine runs. This produces an induction-power which then is picked up at A.
The downsides of this construction are:
Most planes are because of these reasons equipped with an alternator (a AC dynamo).
An AC alternator works similar to the DC generator, by using magnetic induction. But the construction is somewhat different, so AC power is being produced instead of DC power. The construction is completely reversed, the magnet rotates instead of the coil. The magnet is then very often a electromagnet. The power is then picked from the stator which doesn’t rotate, making this solution more robust and less prone for failures.
Because the alternator uses an electromagnet, a small amount of power is needed to power the device. Without power no magnet can rotate. This power is called excitation current.
After the AC alternator, a rectifier unit is placed to convert these alternating current into direct current, usabe by the rest of the plane and charging the battery.
The power the alternator is producing is dependent on the RPM of the engine. To prevent damage or outages due to peaks and lows, the electrical system has a alternator control unit which is basically a voltage regulator. A device which keeps the power steady within the correct range. In many light aircraft this is around 14 volts for a 12V battery system, or around 28 volts for a 24V battery system.
The battery has the following primary functions:
Power in a battery is produced by a chemical reaction. There are different types of batteries which are indicated:
Sometimes we have multiple batteries to have back-up batteries or a separate excitation battery.
In most planes a lead-acid battery is used, just like in cars. This contains plates of lead submerged in sulfuric acid. This reaction between those two materials produces power, which is reversable. This means we can charge and discharge the battery, or pick power from the battery or charge it back. The battery is placed in a battery box which contains a drain for air ventilation.
Batteries always deliver 12 volts or 24 volts. Because the battery must be charged by the dynamo, the voltage of the battery is always lower than the device that charges it.
The capacity of a battery is indicated as ampere-hours (Ah). A battery with a capacity of 50Ah can provide 50 Amps over 1 hour. When you halve the amps, the duration doubles (25 amps for 2 hours, 12,5 amps for 4 hours etc.)
The battery has a specific rating for this Ampere-hour, but this is the theoretical amount. The actual amount is often lower where these conditions lower the capacity:
The Ampere meter is a indication in the cockpit which shows the condition of the electrical system. This measures the amount of amps flowing through the wires. We know two different variants of this indicator:
A bus is a distribution strip, which basically is a static collection of power outlets where all devices get their power from. From the bus the power goes to the circuit breakers and then to the actual devices.
Mostly we have these busses:
Fuses are weak links in the circuit which have the goal to break the circuit if a high power is detected. We have two types of these fuses:
Circuit breakers have a contact with a multi-metal strip. If the power (amps) will exceed the rated limit, the metal will warm up, bending the metal and causing the circuit to break. Circuit breakers that pop must first be cooled down to connect them again. If a circuit breaker pops during flight, EASA recommends to let it disabled when its not needed for a safe resumation of the flight. For example, we can land without flaps or lights or even radio. Altough it would be nice to have them.
A relay is a electromagnetic switch. An example is a starting relay. To power the starting engine, a huge amount of power/current is needed. Turning the key to START causes a small power to the starting relay, powering an electromagnet which results in a closing of the ignition and causing the starting engine to rotate.
In the electrical system, two types of disruptions or failures can occur:
The general guidelines and sympthoms for both types of disruptions are:
In a case of a alternator error its recommended to land the plane at the nearest airfield as an alternator error will cause the plane to pick power from the battery. The remaining time depends on battery condition, battery capacity and electrical load. Power down unnessesary devices where possible.
The alternator can sometimes be reset by switching the master switch to off and back on.
The pitot-static system is a system with three indicators from the cockpit connected:
Before looking at the instruments and probes, let’s first take a look at the different airspeeds.
Airspeed in aviation can be measured in 4 different terms which sound ridiculous but this has their specific reasons.
| Speed | Abbreviation | Definition |
|---|---|---|
| Indicated Airspeed | IAS | The airspeed shown on the airspeed indicator, based on the difference between pitot pressure and static pressure |
| Calibrated Airspeed | CAS | IAS corrected for instrument and position errors |
| True Airspeed | TAS | The actual speed of the aircraft through the surrounding air mass |
| Ground Speed | GS | The speed of the aircraft relative to the ground |
The Pitot and the static port are 2 openings on a plane which measures a different type of pressure:
These two components are connected to 3 of the basic 6 instruments we must have in a cockpit:

The static port is an opening (mostly on the left side) that measures the static air pressure while in the air. The pressure it measures is displayed on your altitude indicator.
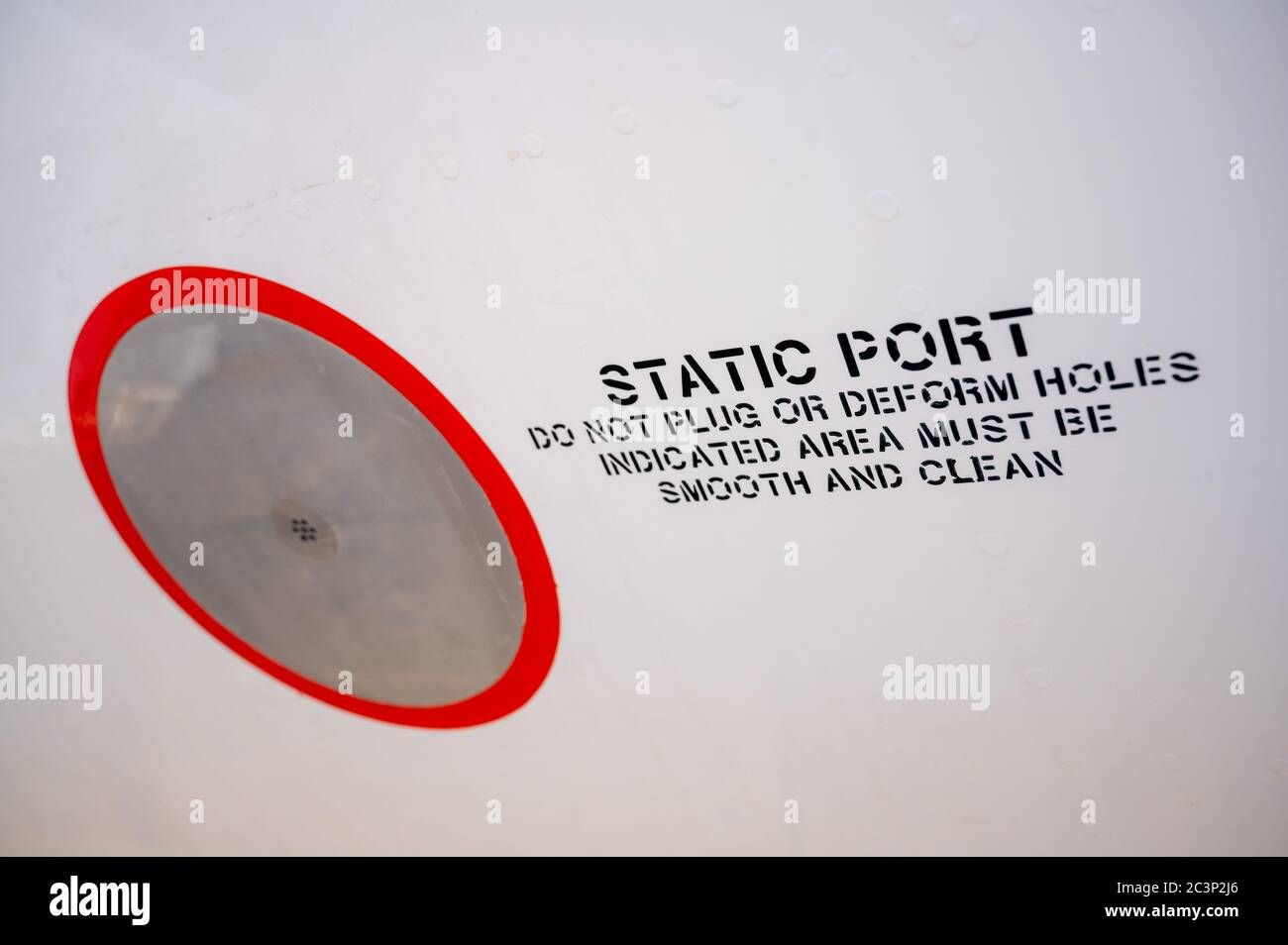
This opening is placed in a position where it is not directly facing the incoming airflow, so it can measure static pressure as accurately as possible. In some planes, this is integrated in the pitot-probe.
When having problems with altitude or vertical speed (like in the winter), we have a second option of static air, the alternate static port/alternate air. This takes air from the cabin. Cabin pressure is often slightly lower than outside static pressure, so the altimeter can indicate higher than the true altitude. The exact correction must be found in the POH.
In some emergency situations, if no alternate static source is available, the POH or training material may describe breaking the VSI glass to provide a static source. This makes the VSI unusable and should only be considered as an emergency measure according to training and procedures.
The static port cannot always be at the right spot on an airplane. It must measure the static pressure so it must be on the side, but speed, AoA and flaps can influence the airflow around the static port and also the static pressure. This im-perfect placement causes an error in the measurement, called the position error. This has a small influence on the measured altitude, speed and vertical speed. Also some errors caused by manoeuvres can happen. Some planes have multiple static ports to minimize these errors.
This same also applies on the pitot probe, although this only measures dynamic pressure.
Some planes have an extra alternate static port in case the normal port is broken or something. This can be opened in the cockpit, so the air pressure of the cockpit can be used to measure the altitude, speed and vertical speed. The pressure in the cockpit is often somewhat lower than the outside air pressure, so the altitude meter can indicate too much. In the POH you can find a altitude correction table.
The pitot probe measures total pressure, which is used together with static pressure to determine the aircraft’s airspeed. The airspeed shown to the pilot is called Indicated Airspeed (IAS). It basically converts the amount of air molecules going into the probe and gives this information to the Indicated Airspeed instrument in the cockpit. There it is being corrected for the static pressure to display the correct amount of knots in every situation.

When shutting down the aircraft, a red cover is placed over the pitot probe. This helps prevent insects, dirt, moisture, or ice from blocking the probe, which could cause the airspeed indicator to give incorrect readings or stop working during flight.
Airspeed is measured using both the pitot probe and the static port. The airspeed indicator compares the total pressure from the pitot probe with the static pressure. The difference between these pressures is used to display the aircraft’s airspeed. An increase of the True Airspeed also means more “thrust pressure” (stuwdruk) in the pitot probe as more air passes through it.
The pitot probe can be blocked by ice, insects, vapor or dumbly enough by forgetting to take the cover off. The exact indication depends on which opening is blocked. If the pitot opening is blocked but the drain hole remains open, the airspeed indicator can drop to zero. If the pitot pressure is trapped, the airspeed indicator can act like an altimeter: too high in a climb and too low in a descent. When this happens, we can expect the following effects:
| Airspeed Indicator | Altitude Indicator | Vertical Speed Indicator | |
|---|---|---|---|
| Pitot probe - climbing | Indicates too high | Stays working normal | Stays working normal |
| Pitot probe - descending | Indicates too low | Stays working normal | Stays working normal |
| Static probe - climbing | Indicates too low | Keeps indicating a specific altitude | Keeps indicating 0 |
| Static probe - descending | Indicates too high | Keeps indicating a specific altitude | Keeps indicating 0 |
| Both - climbing | Keeps indicating the blockage speed | Keeps indicating a specific altitude | Keeps indicating 0 |
| Both - descending | Keeps indicating the blockage speed | Keeps indicating a specific altitude | Keeps indicating 0 |
During take-off, we say the phrase “Airspeed alive” because of this check. If the airspeed is not working before rotation speed, we shouldn’t take-off either as the plane is then categorized as “unsafe to fly”.
The pitot has a heating element as this part is sensitive for ice-deposition. To prevent that the ice blocks this instrument, we have a switch in our cockpit called the Pitot heat. This enables a heating device in the pitot probe which prevents ice. This is a part which can take a lot of electrical energy, so do not use it too much when not running the engine. Pitot heat should be used according to the POH/checklist, especially in visible moisture or possible icing conditions.
Measuring the speed of a plane is based on measuring air pressure differences. Air has a certain pressure which is called the static pressure. As we fly through the air with speeds over 100 km/h, we also have some air flowing into the pitot probe. This is called the total pressure (static + dynamic). As the pitot-static system also knows the static pressure, it can make an easy calculation of what the dynamic pressure is, what then is converted to a readable airspeed indication on the Airspeed indicator in the cockpit.
The calculation that is made:
As the pitot probe and the static port are both connected to the airspeed indicator-room in the instrument, here is where the actual calculation is being done. Here is a diaphragm connected to the pitot probe is being filled with the total pressure. In the house where the diaphragm is mounted is connected to the static port.
Speed needs to be corrected for the actual pressure, as dynamic pressure is dependent on the air density. This means that in air with a lower density, without correction, the indicator will be way too low. Airspeed indicators are calibrated on ISA air density, meaning 1,225 kg/m³. This means the indication is only 100% correct in cases where this air density is active.
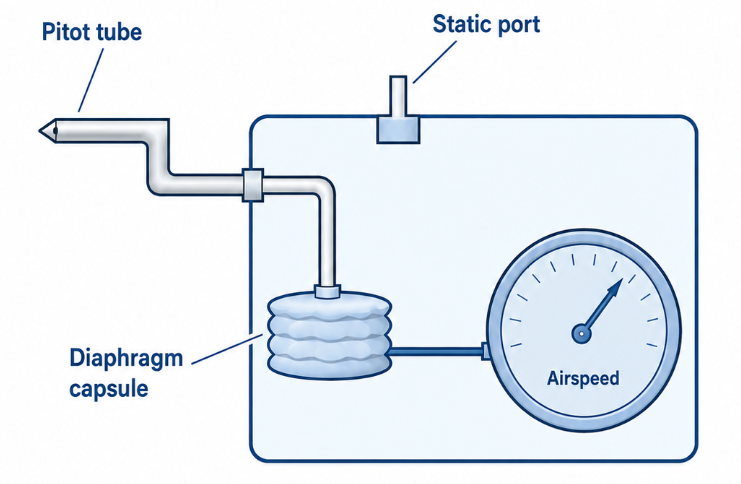
The airspeed indicator has a minor “deviation”, due to minor incorrections in the mechanical parts and differences in air flow. These are called the instrument-errors and we can convert an indicated airspeed to the calibrated airspeed, which differences are very often about 1 to 3 knots. The calibrated airspeed is called the CAS.
So if we want to convert our indicated airspeed to true airspeed, we must go from IAS to CAS and then to TAS. Use the E6B calculator for this.
The airspeed indicator has some color codings on the edge, telling you different things very easily:
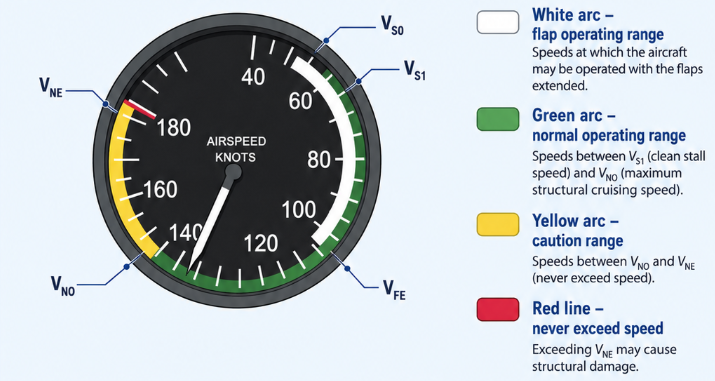
Some planes also can have a Statute mile indicator or even km/h meter instead of knots.
Altitude is expressed in feet or meters in aviation. Most planes and pilots use feet, as this is internationally accepted but some smaller aircraft also use meters.

The altitude indicator is basically a pressure-meter. Air pressure decreases as we go higher, and by setting a reference, it knows exactly how far awar we are from that reference point. We have multiple reference points which we can use. The earth’s surface is not perfectly flat, and every piece of land has a different elevation (height above sea level). This is where we use different references, based on the air pressure:
| Q-code | Meaning | When to use | Indication name |
|---|---|---|---|
| QNH | The pressure measured on the ground, and then converted to mean sea level | To measure the altitude above mean sea level | Altitude |
| QFE | The actual pressure on the ground | To measure the altitude above the ground | Height |
| QNE (SAS*) | The ISA pressure altitude, namely 1013 hPa or 29.92 InHg | Above the transition altitude, in the Netherlands 3500 feet | Flight Level |
SAS* means Standard Altimeter Setting, 1013 hPa
In most cases, we use QNH. When QNH is set, the altimeter indicates altitude above mean sea level. On the ground at the aerodrome, it should indicate the aerodrome elevation. When QFE is set, the altimeter indicates height above the selected aerodrome reference and should read approximately zero on that aerodrome. When 1013 hPa is set, the altimeter indicates pressure altitude, used for flight levels above the transition altitude.
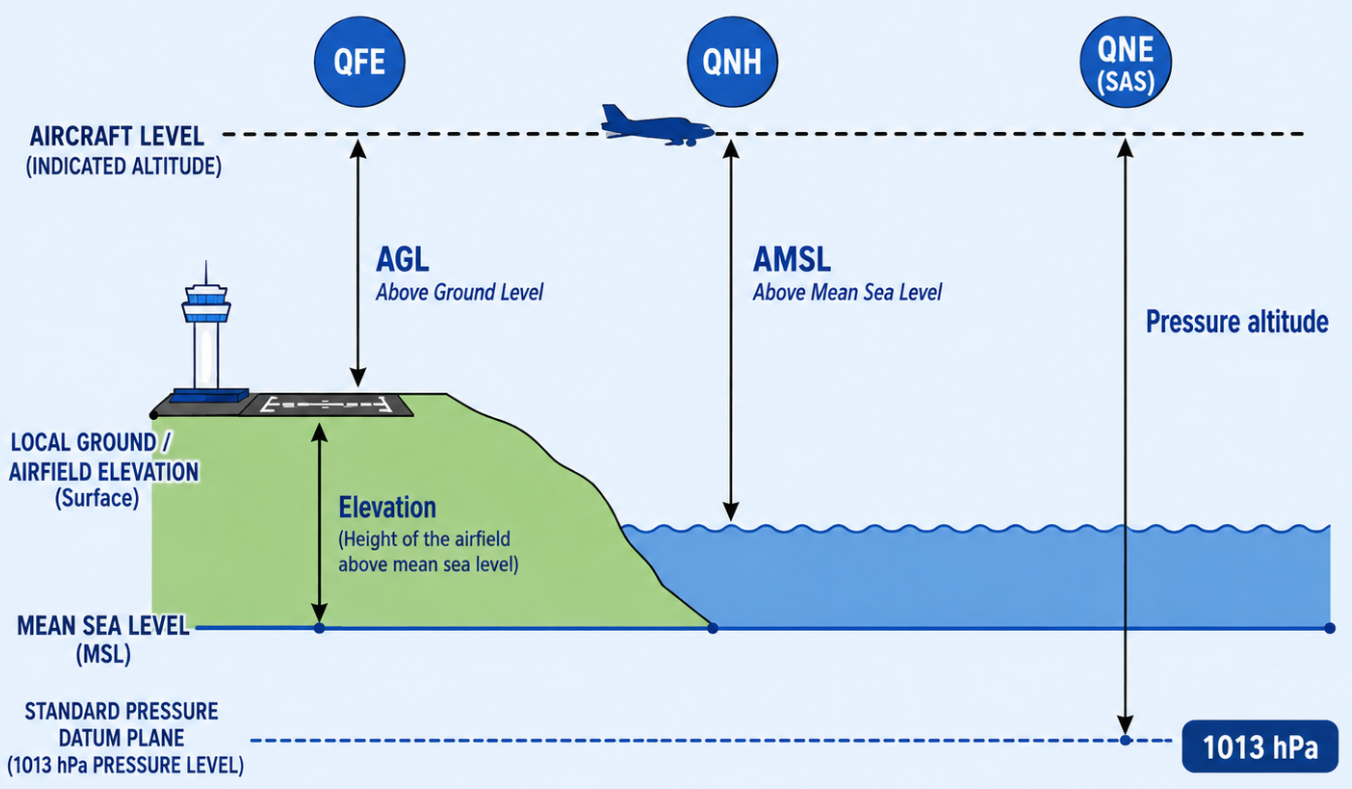
In flight regions we often use a “regional QNH”, which prevents us from 2 problems:
The altimeter is as said basically a pressure meter (barometer), converting a pressure difference between your reference point and the static pressure measured by the static port to an altitude number in feet. The static port is connected to the instrument-chamber where a diaphragm(s) is placed. This diaphragm(s) has a certain pressure in it and the outside pressure pushes on the diaphragm(s). As you increase in altitude, the static pressure decreases, which causes the diaphragms to expand. This is then mechanically contected to the indicator needles and showing the pilot the altitude from their reference point. The diaphragm is also known as aneroid.
You can set the reference point with the dial in the cockpit.
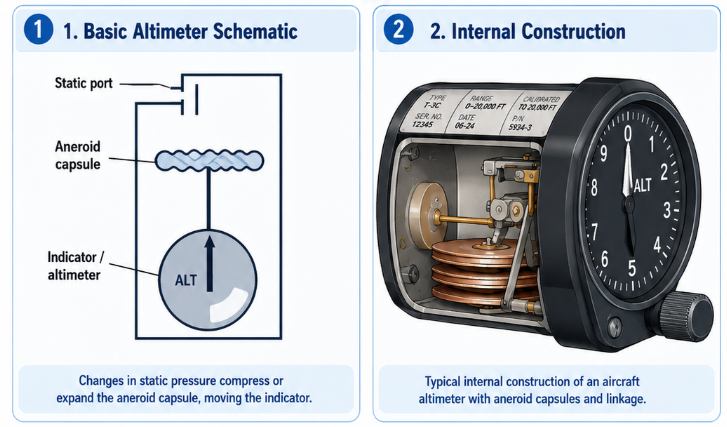
The altitude indicator mostly has 3 indicator needles, and works like a clock:

In modern times like 2026 it would be much easier to use proximity sensors or GPS to calculate your altitude. This doesnt work with sensors at the bottom of the airplane, as we would have a different altitude every nanosecond and as other traffic in the vicinity which we want to avoid. Also, based on knowledge and earlier incidents the aviation world agreed on the pressure-based version as pressure is always there. Even when having a engine fire, electrical error and all sorts of problems at once.
The altitude indicator can also have some minor errors, where the indication is not 100% correct to the actual altitude:
No measuring instrument is 100% perfect, and some minor instrument errors can affect the indication:
According to ISA the pressure on sea level is 1013,25 hPa. If the actual pressure deviates from this pressure, an uncorrected altitude indicator will indicate a wrong altitude. This is why we have a dial and reference points.
A rule of thumb is that every decrease of 1 hPa is a 30ft difference.
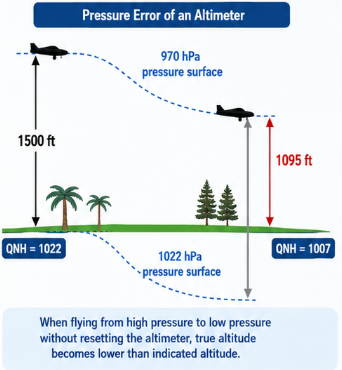
This is also applicable to situations where you fly from country A with a QNH pressure of 1022 hPa to contry B with QNH pressure 1007 hPa. This causes the true altitude to decrease where your indicated altitude will still show 1500ft.
A pressure altitude meter will indicate the true altitude only in ISA conditions. If the temperature increases above ISA, the coloumn of air will expand and the true altitude will become higher than the indicated altitude. Warm air expands and causes the air pressure to drop, and as the altitude indicator is a pressure-meter, this is c=exactly the cause.
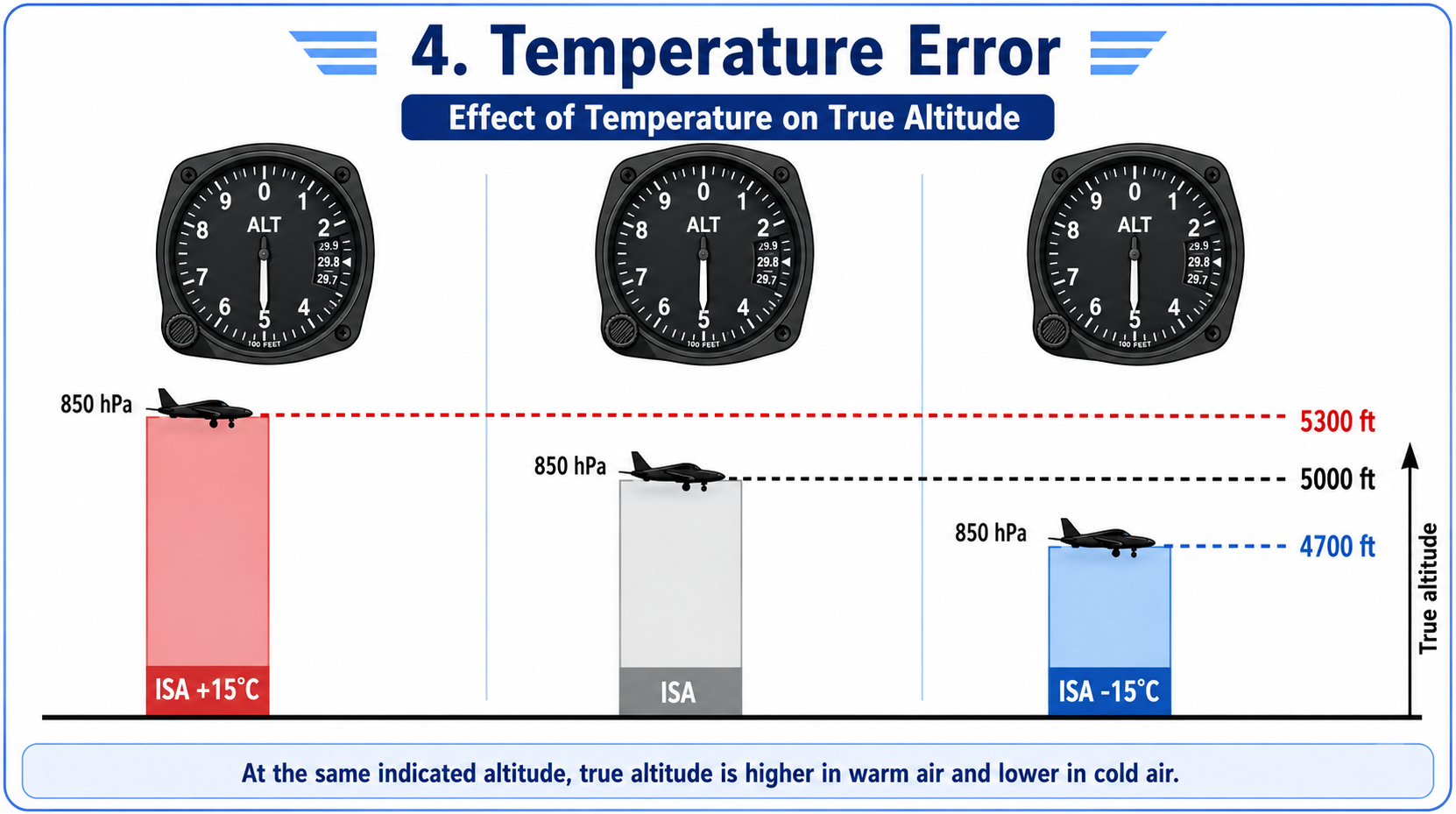
The vertical speed indicator will indicate if the plane is ascending, descending or in straight and level flight. This does it by indicating how much feet you descend or climb in one minute. The instrument is always zero-centered and goes up when climbing and goes down when descending. Basically following the flight path of the plane. The VSI measures the rate of change of static pressure and has a short delay from pressure change to indication in the cockpit, as it relies on measuring pressure difference with the pressure from some seconds before.
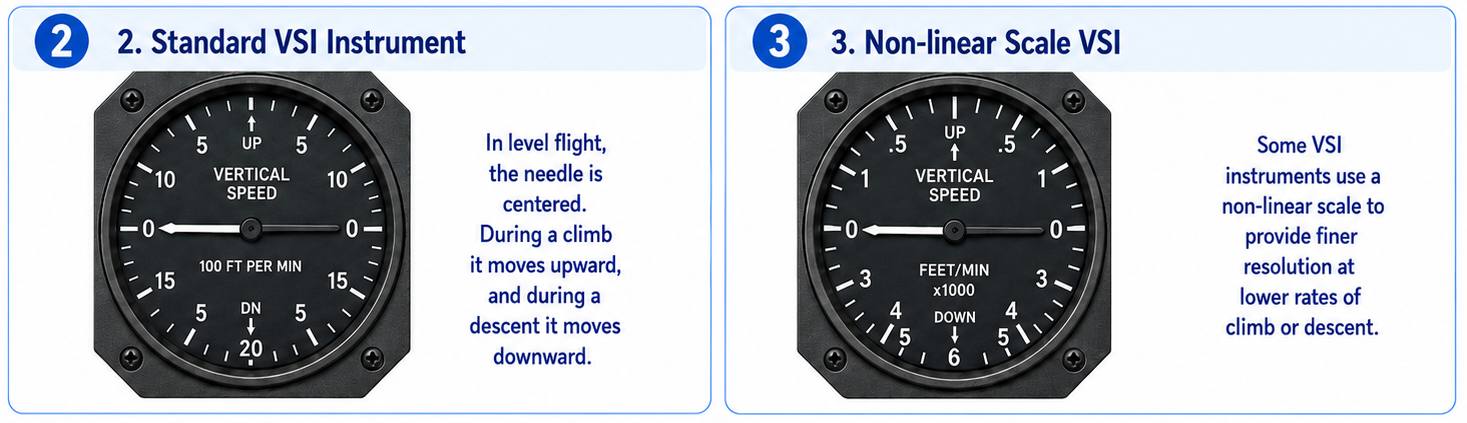
This works almost the same as the altitude indicator, by connecting the static port to the instrument, but in this instrument, the static port is connected to both the diaphragm/aneroid and the instrument-case. The air into the instrument case is filled up with a calibrated opening and delayed, so the instrument measures the pressure difference of the air according to the pressure of some seconds ago. This calibrated opening is also called the capilair.
This is also the cause of why this indication has some delay/lag, as the instrument-case is slowly filled with the air.
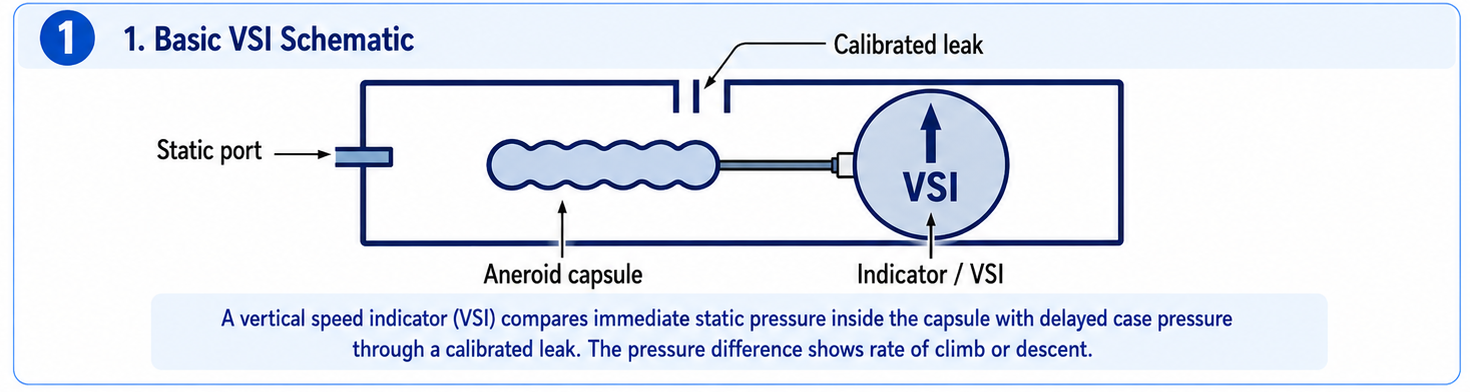
Because the VSI is connected to the static port, and this can have errors when maneuvering and position errors, this can cause some instrument errors to this indicator. Temperature also have a minor deviation on the indication. Lower temperature cause the needle to give lower indications than with high temperatures.
The VSI also has some delay/lag as already described. This delay increases with the size of the climbd/descends you make.
Some aircraft instruments rely on the properties of a gyroscope. This is an efficient way to have the indicators working. In many older or traditional light aircraft, the attitude indicator and heading indicator are powered by an engine-driven vacuum system, while the turn coordinator is electrically powered. Modern aircraft can use electrical gyros or digital AHRS systems instead. This is done for redunancy, so if one system fails you still have all types of indications.
The indicators which uses gyro’s to function:
We can use the Turn coordinator and magnetic compass in situations the pneumatic gyro’s are not working, and we can use the attitude indicator when the electrical gyro is not working. Clever built-in fallback.
A gyroscope is a very fast rotating disc at speeds between 20.000 to 25.000 revolutions per minute and is used in some cockpit indicators because it has some physical properties:
So in short:
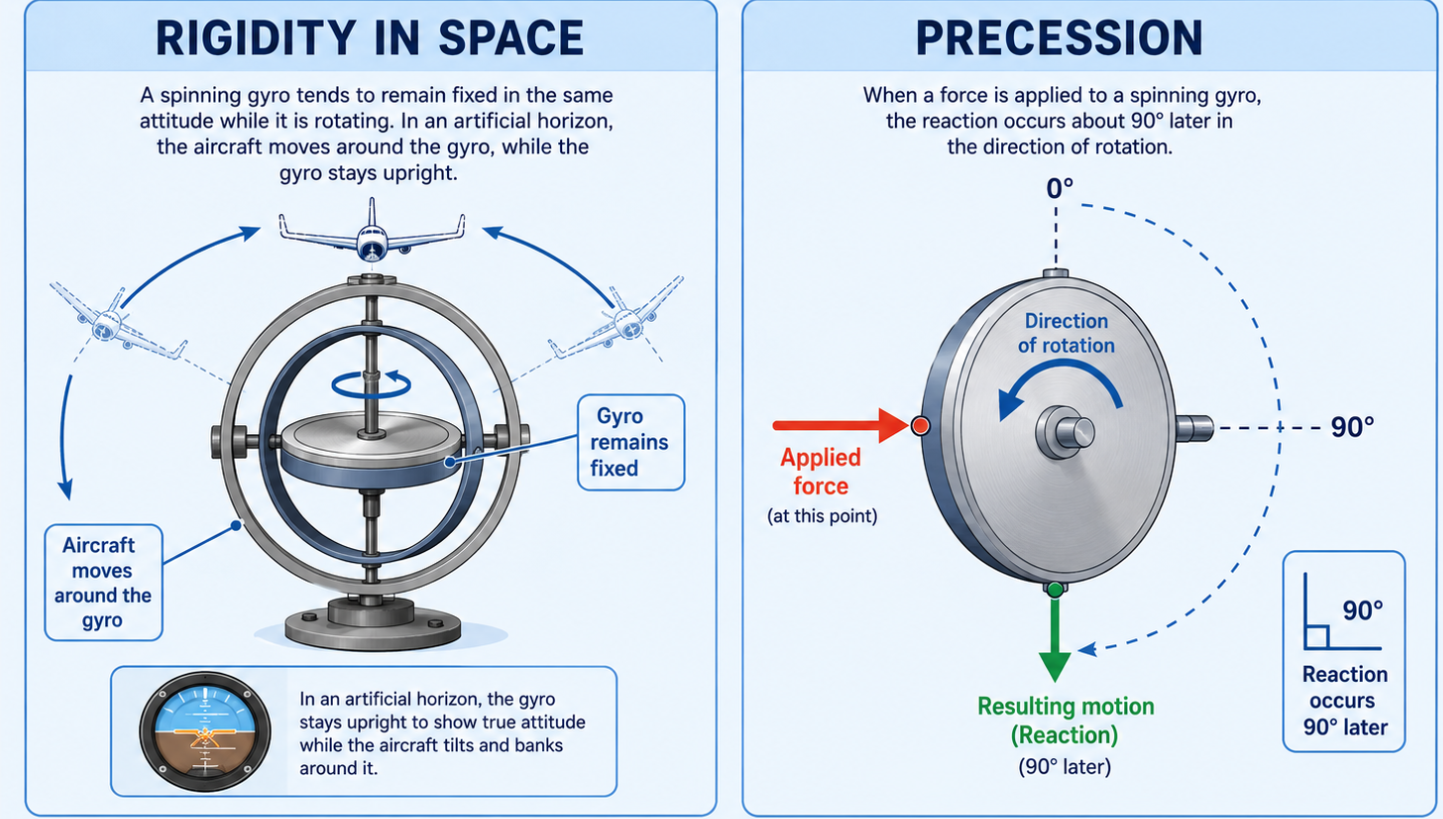
To learn more about gyroscopic instruments, I recommend this video: https://www.youtube.com/watch?v=hVsx4XWafXg
The gyroscopes are powered very often in two different ways for redundancy:
In the cockpit we have a “Suction”/Vacuum indicator, which is this vacuum pump. This tells us more on how much we trust our vacuum-powered gyro’s.
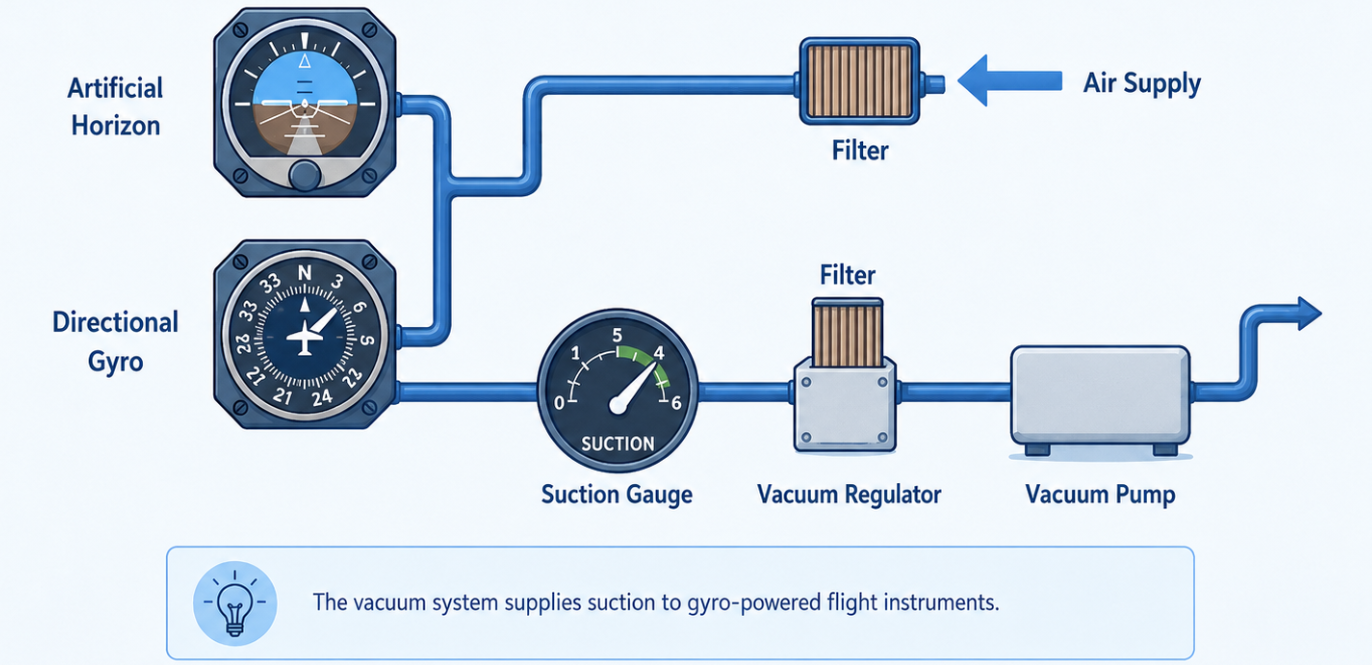
The pump itself is driven by the engine, so the pressure itself is dependent on engine rpm. To prevent the pressure from being too low, we have a pressure regulator called the cacuum regulator to keep the pressure at a constant value. To also secure this pump, this is also equipped with a filter. The suction gauge is the pressure difference before and after the instruments and is indicated in inches of mercury (InHg) which is often around 5 InHg. Higher values give more under-pressure and a lower total pressure.
As the vacuum-pump is driven by the engine, it can have errors:
When flying VFR, these errors are not that huge problems. We still have an engine pushing us forward, we still know our altitude and speed and we can continue with our magnetic compass. However, flying IFR makes a difference, as we cannot see the horizon so we don’t know our roll axis. We can use the turn coordinator as backup for banks but this is much harder as the indication is not as precise as the artificial horizon.
A gyro-disc which can move freely will keep a fixed attitude in the space. In real life, some drift or wander can happen. We have three types of gyro drift:
The attitude indicator shows the attitude of the plane based on the natural horizon. With this instrument, we know the attitude without looking outside. We can see the following parameters on this instrument:
In the attitude indicator, a horizontal placed disk spins in a vertical axis.
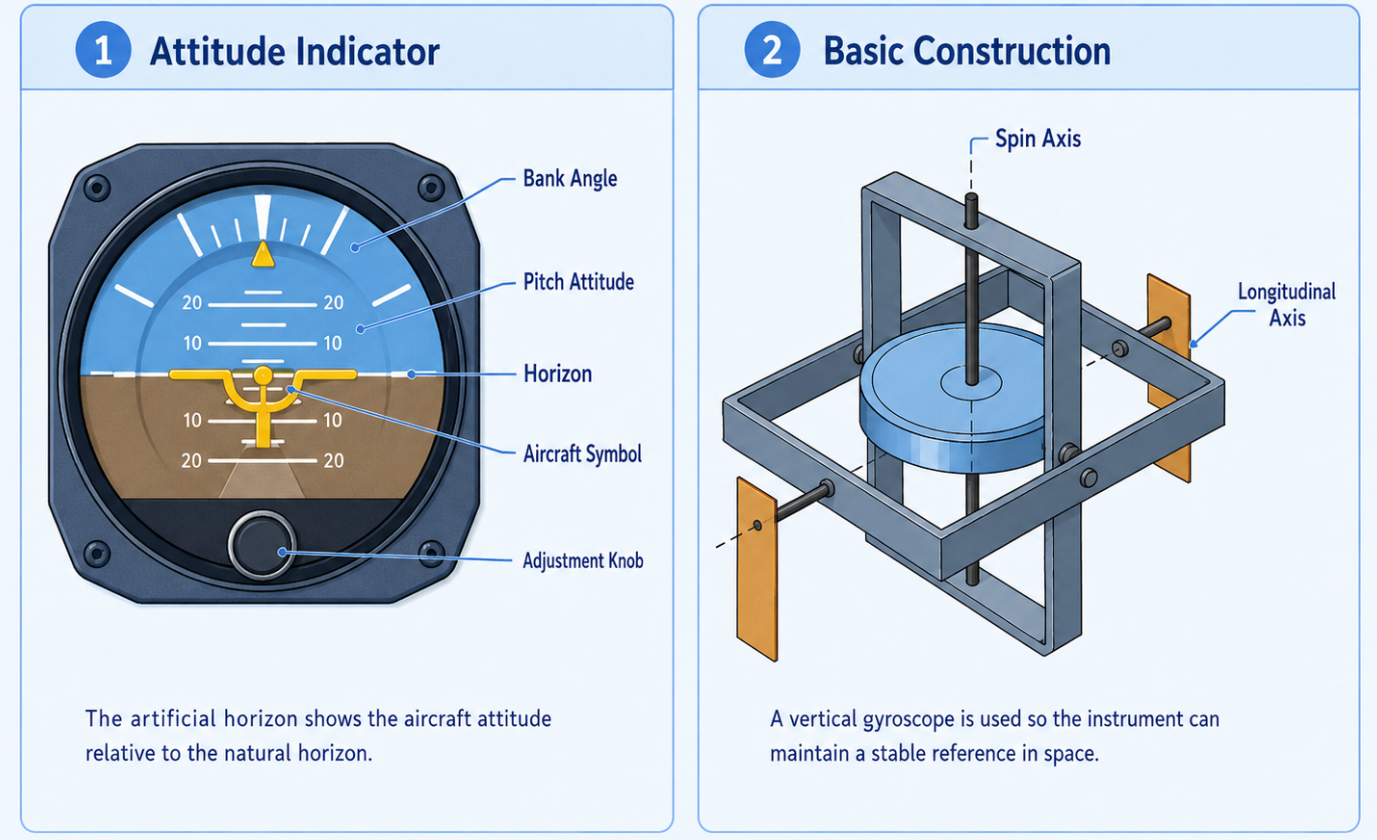
In this way, the attitude indicator is set to a earth bound gyro. A copy of the visible horizon.
Pneumatic attitude indicators can have some errors while accelerating and while turning. When holding this attitude for a short while, the instrument will correct itself so it can indicate too much roll and acceleration.
During the taxi checks on the ground, we will steer left and right to check if every instrument is working correctly, but the attitude indicator must be stable and level. If this indicator moves during this check, the indicator is defective and a choice must be made to fly with it or not. When not expecting clear weather and perfect visibility, great chance its not a great idea to fly with this defective indicator. Also, we can only trust these pneumatic indicator if the suction pressure is within accepted limits.
Just like the attitude indicator, the directional gyro which we use as a copy of your magnetic compass is relying on the rigidity in space. This has a vertical disc spinning in a horizontal axis.
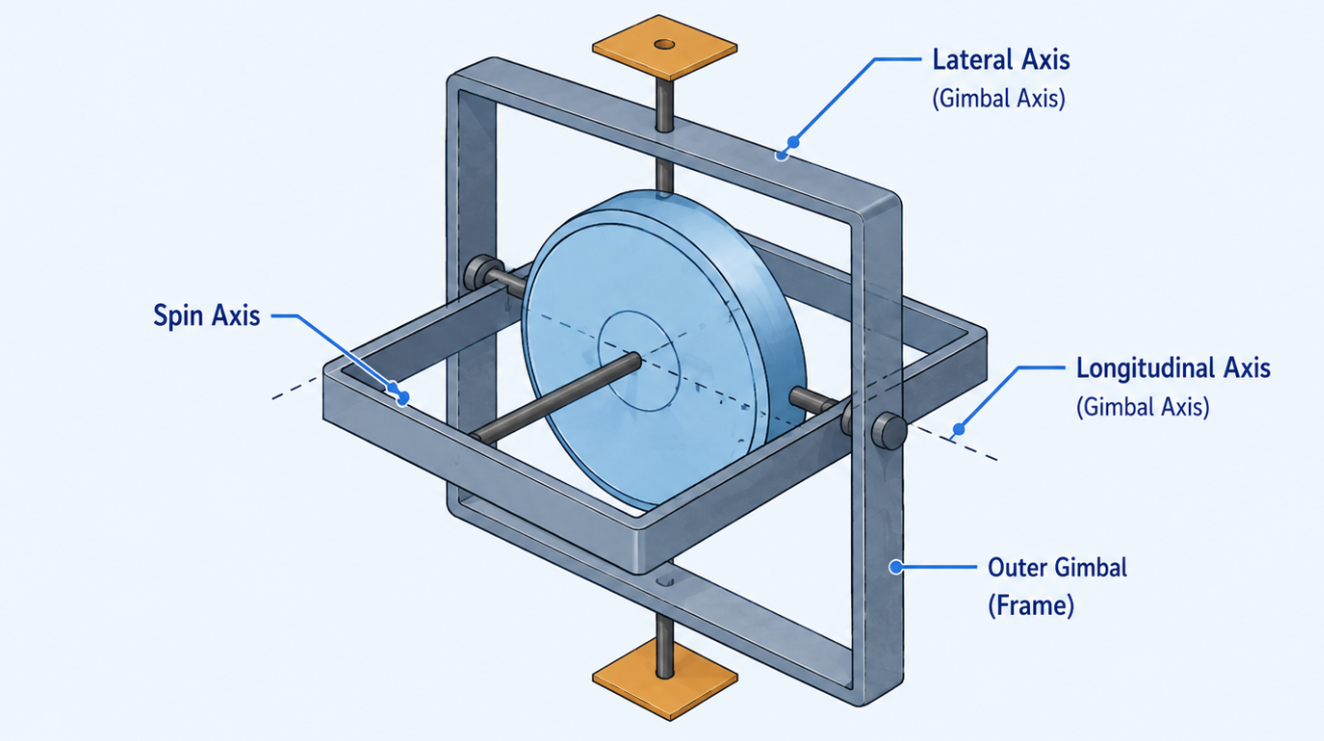
We have to set this compass every several minutes to the same heading as the magnetic compass to make the directional compass show the compass heading. This does not represent the true (chart) heading.
The gyro compass is much more reliable in turns and has a overall more stable indication. Magnetic compasses have turning errors and do not indicate the right heading in turns. It also doesn’t work that great in turbulent air. The gyro compass does not have the same magnetic turning and acceleration errors, but it can drift over time and must be regularly checked and aligned with the magnetic compass.
The turn coordinator gives us information about the direction and speed we make our turns. The rate of turn (ROT) is the amount of degrees per minute we change direction. We also have a “water-level” like indication if we make coordinated turns, or how to make them based on your current flight actions. The turn coordinator is sensitive to rolling and yawing movements, so the instruments does indicate turns while on the ground. This is one of the checks we do on the ground during taxi.
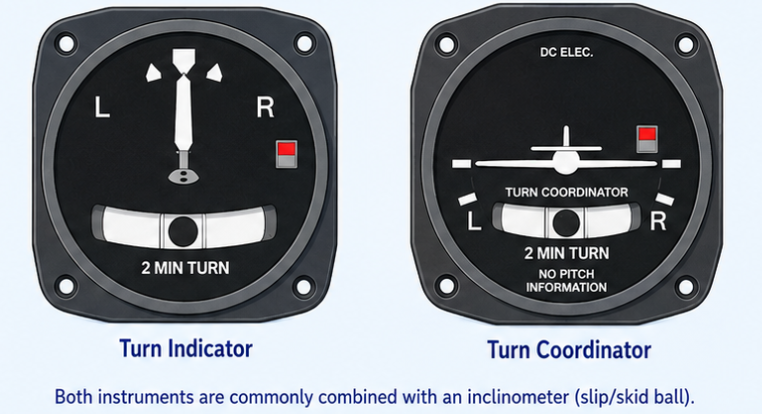
This instrument is the only electrical powered gyro instrument in most planes and is used as fallback when the pneumatic instruments are not indicating correctly. It also has a electrical switch/power indicator, as the instrument is powered the red block will disappear but when the power is broken, a red indication will show, telling you to not use the instrument.
The rate of turn is indicated in rates. A rate-one turn is 180 degrees in one minute, 360 degrees in 2 minutes etc.
The turn coordinator shows the rate of turn, not the actual bank angle. The bank angle needed for a rate-one turn depends on airspeed. It also has a ball to show if you make a coordinated flight. A rule of thumb for this is “step on the ball”, meaning to press the pedal on the side where the ball is to get it in the middle.
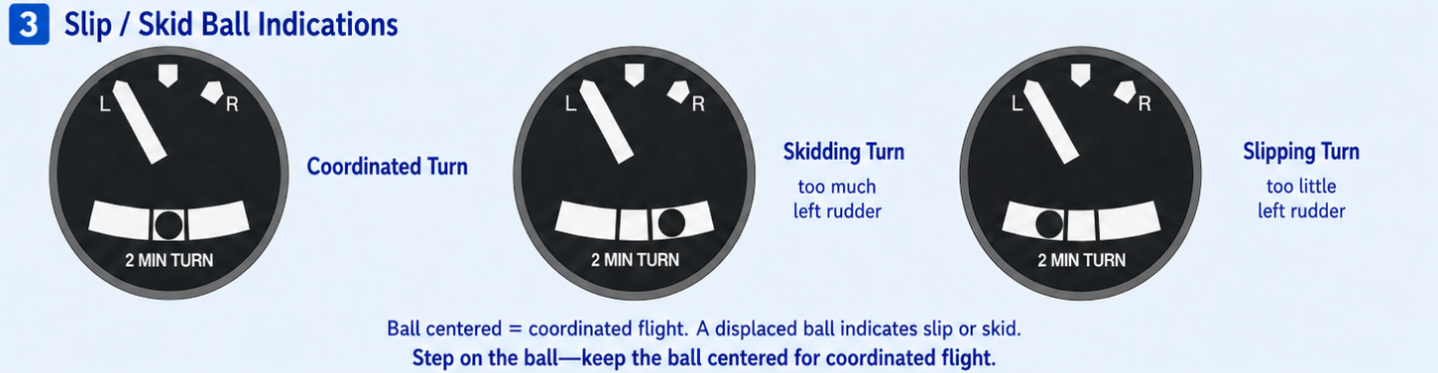
When making coordinated turns, you fly with less unnecessary drag and better passenger comfort. Slipping or skidding in turns increases drag and can be unsafe, especially close to stall speed. Air will then not come from straight forward.
Remember this sentence: Step on the ball
To summarize all indicators and information described above, I have made this table:
| Instrument | Main purpose | Powered by | Properties | Mounted | Axis of rotation |
|---|---|---|---|---|---|
| Attitude Indicator (ADI) | Shows pitch and bank attitude | Pneumatic | Rigidity and Precession | Horizontally | Vertical axis |
| Heading Indicator | Shows aircraft heading | Pneumatic | Rigidity | Vertically | Horizontal axis |
| Turn Coordinator | Shows rate of turn and helps identify slip or skid | Electrical | Precession | Vertically/tilted | Horizontal/tilted axis |
In modern aircraft, we can see more and more indicators being replaced by glass cockpits, where all of the instruments we know are being replaced by screens displaying all the needed data. The advantages of screens are pretty much that you can display anything you want and switch through different menus.

We know two types of screens:

Under the screens we also have some fallback instruments which still work like the how older planes dit it, this is in cases the electrical system or screens fail. We then still know our speed, attitude and heading to land the plane safely.
The Air Data Computer (ADC) receives data from the pitot-static system and often outside air temperature. It converts this data into digital information such as airspeed, altitude, vertical speed and true airspeed. Engine data such as RPM, oil temperature and oil pressure normally comes from engine sensors and an engine indication system. We also have a magnetometer which senses the earth’s magnetic field and helps provide magnetic heading information. This is then converted into digital data by the AHRS, which is the Attitude and Heading Reference System.
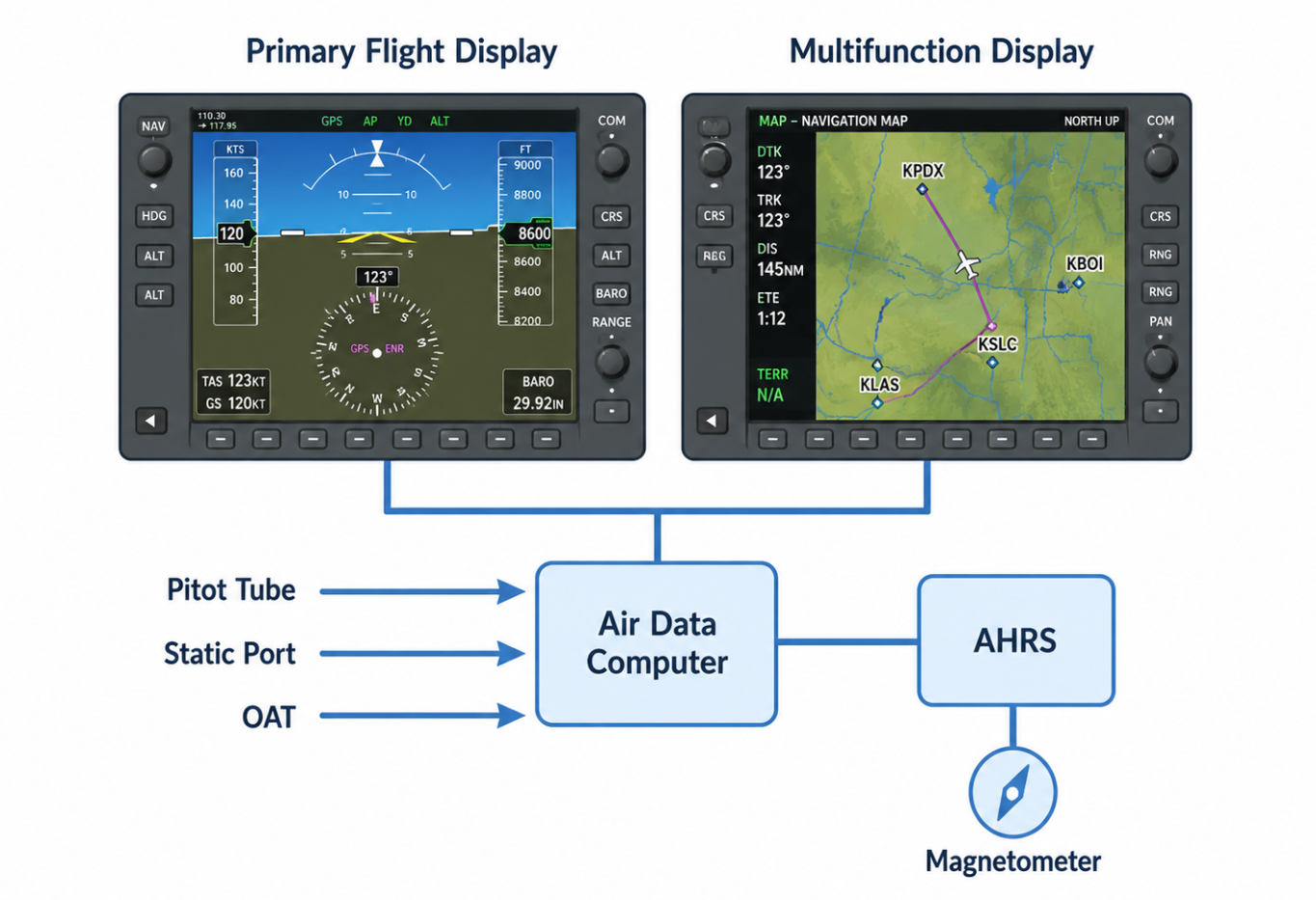
For more information, check out: https://flightblog.justinverstijnen.nl/ppl-theory-nav/#true-north-vs-magnetic-north-vs-compass-north-16
A magnetic compass is working on the sensitiviness of earths magnetic field. With using compasses we have three different references of “north”:
Earth has a magnetic field around it, mainly caused by movement of electrically conducting molten iron in the outer core. This causes compasses to align with the earth’s magnetic field and point toward magnetic north. However, the magnetic north pole is somewhat different and is moving from time to time.
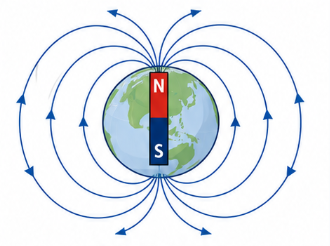
Magnetic north is the direction a compass points to when no local interference is present. Because this magnetic field is mainly caused by movement of electrically conducting molten iron in the outer core, this point changes from year to year. At this moment in 2026 the magnetic north pole is around several hundred kilometers away from the true north pole. The angle between true north and magnetic north at a specific location is called magnetic variation or magnetic declination.
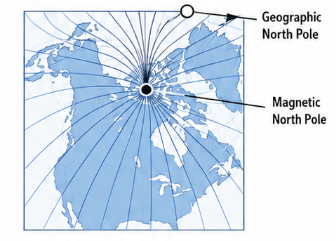
As this variation is different all over the world, we can find this in the AD information in the AIP or in apps like SkyDemon and Aeroweather. On our chart we have isogonic lines which connect different places with the same variation.
Why this is so important, is that on most places the variation will be a few degrees of, but in other places like close to the poles you can get a theoretical difference of 180 degrees between magnetic north and true north, which means you could fly to the complete opposite side if not taken everything into account.
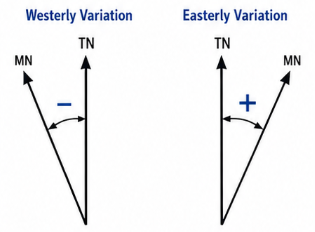
Inclination, also called magnetic dip, is the angle at which the earth’s magnetic field points into the earth. Near the magnetic poles, the magnetic field points much more vertically. This makes a magnetic compass less reliable, because the compass card wants to dip instead of only rotate horizontally. We can say that above 60 degrees north or below 60 degrees south, we are close to the poles and the magnetic compass becomes less trustworthy.
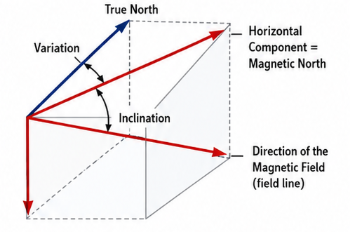
The magnetic compass which we have in our airplane is constructed with some magnets in a rotatable case. This case contains dampingfluid which helps the compass to move slowly and better move factor in turns.
This compass can have some errors due to electromagnetic fields. Also when a plane is parked in the same direction for a long time the compass can give false indications. The aircraft maintenance companies can recalibrate the compass.
A compass wants to line up into the magnetic field lines. Because of the inclination for example in the Netherlands, the magnet also wants to point 67 degrees down. A magnetic compass is constructed so the compass can only move horizontally. But it can have some errors:
The magnetic compass is a simple but limited device and should mainly be used in straight, level and unaccelerated flight, or in situations our gyro-based compass, avionics and other devices are not working.
The turning error will be induced by turns we make in a plane. On the northern hemisphere, this can be remembered with UNOS:
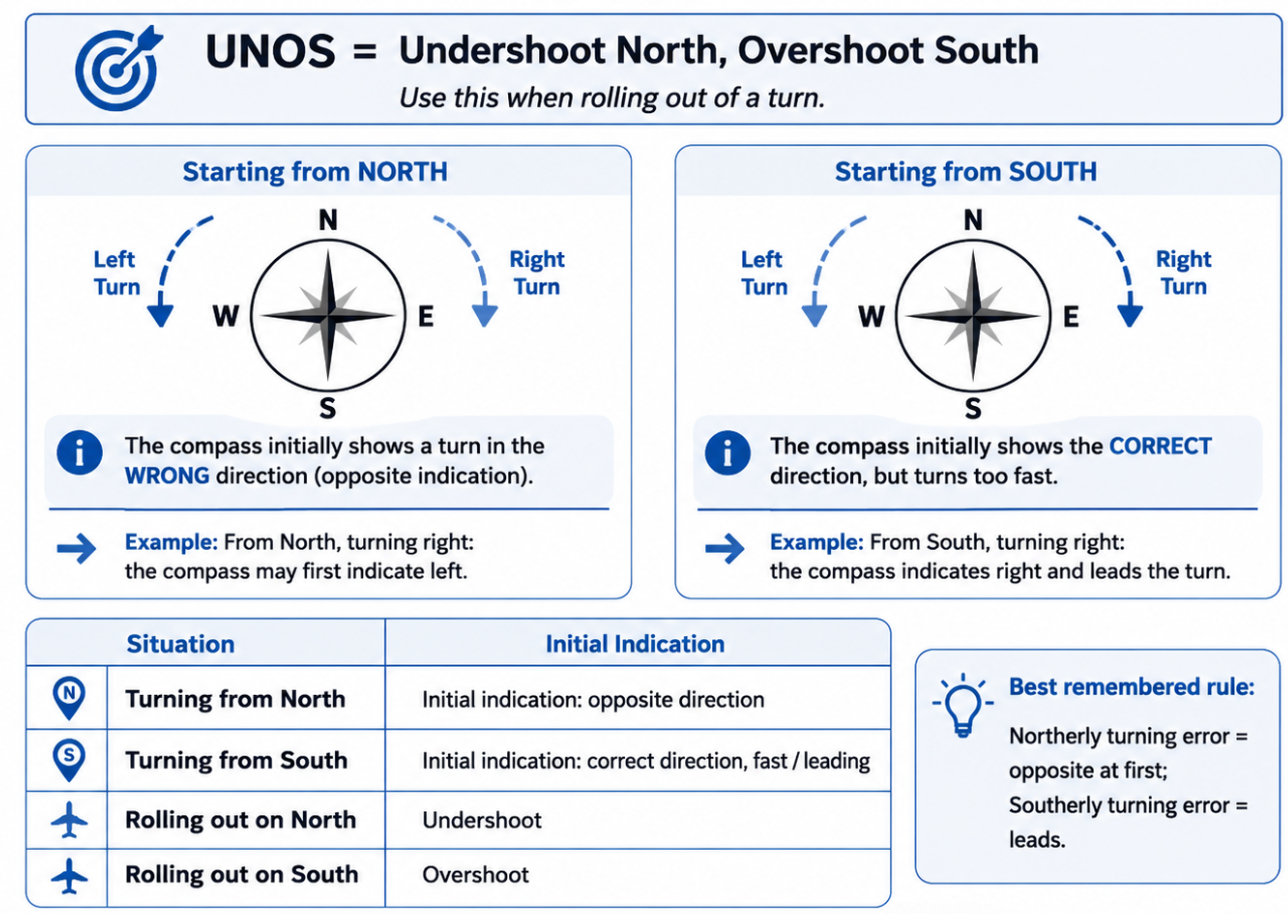
This is because the compass lags or leads during turns, especially on northerly and southerly headings.
On the northern hemisphere, acceleration errors are most noticeable on east or west headings and can be remembered with ANDS: Accelerate North, Decelerate South. During acceleration, the compass indicates a turn toward north. During deceleration, the compass indicates a turn toward south. After the acceleration or deceleration stops, the compass indication will settle again.
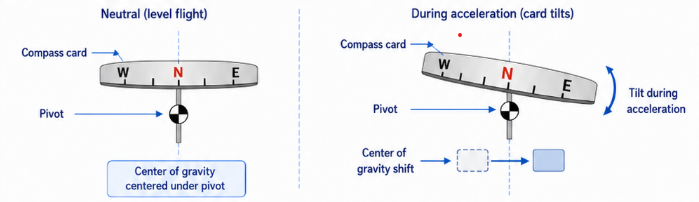
You have reached the end of the page. You can navigate through other blog posts as well, share this post on X, LinkedIn and Reddit or return to the blog posts collection page. Thank you for visiting this post.
If you think something is wrong with this post or you want to know more, you can send me a message to one of my social profiles at: https://justinverstijnen.nl/about/
If you find this page and blog very useful and you want to leave a donation, you can use the button below to buy me a beer. Hosting and maintaining a website takes a lot of time and money. Thank you in advance and cheers :)
The terms and conditions apply to this post.
For a live overview of my flight lessons, visit: https://flighttools.justinverstijnen.nl/flightlessontracker
This page can contain a collection of personal notes, steps to remember, finished and unfinished content. Please excuse brevity.
Do not use specific information given like fuel flow, landing/take-off distances for your flights. Always refer to the POH of your exact plane for flight preparation. My information is just for references that I used.
The atmosphere is the layer around the earth, which is around 100 to 200km from the ground up. Worldwide, we use the International Standard Atmosphere which is a mean set of conditions which will be somewhat different depending on the weather conditions, location etc. This is a mean of the conditions at 45 degrees north latitude.
In the standard atmosphere, we use these characteristics:
This is a set of conditions, but some numbers can defer in the real world, due to the location or different seasons. Now, lets take a look at the different layers in our atmosphere:
| Layer | Altitude | Characterstics | Temperature gradient (ISA) |
| Thermosphere | 280.000ft and up 85km and up | Thin air and high temperature due to solar radiation. Auroras happen in this layer | Increases with altitude |
| Mesosphere | 160.000ft - 280.000ft 50km - 85km | Meteors burn up in this layer, coldest layer | 0c to -90c |
| Stratosphere | 36.000ft - 160.000ft 11km - 50km | Contains the ozone layer, stable air with some jet streams at the bottom | -56,5c to 0c |
| Troposphere | 0 - 36.000ft 0 - 11km | Bottom layer at the ground of earth and where weather/clouds take place | 15c to -56,5c |
Let’s take a further look into every layer in depth:
The thermosphere is the first layer of the atmosphere and the one with the hisgest temperatures due to solar radiation. This layer also contains aurora’s and are the best visible from the (magnetic) north pole and south pole.
The mesosphere is the layer above the Stratosphere and is the layer where the ozone layer resides. This layer is the part of the atmosphere where most meteors will burn up heated from the thermosphere, the layer above the Mesosphere.
The stratosphere is the layer above the troposphere and starts very cold, but at the height it is around 0 degrees celcius. This is also the layer where the Concorde used to fly to achieve supersonic speeds, due to the low air density. The layer contains some jet streams.
In the troposphere, the lowest layer that spans from ground to around 36.000ft up is where all weather takes place. Here are the most winds, clouds and storms. When going from the ground up into the air in the troposphere layer, the temperature will decrease by 2 degrees celsius for every 1000ft you ascend. At around 36.000ft, the temperature is around -56,5 degrees celcius.
The temperature loss happens because of the loss of radiation coming from the earth. The sun warms up the earth, and earth radiates that heat back up into the air.
We also have an additional layer called the Ionosphere. This is a layer where gasses will be ionized by the high level of solar radiation. The result of this is a somewhat conductive layer of electrons and ions where HF frequencies profit from. These will follow the curvature of the earth because of this Ionosphere, where normal frequencies follow a straight line colliding to the earth after around 300km. Also GPS can get some propagation errors because of the radiation in the Ionosphere.
This collective layer lays over the upper part of the mesosphere and thermosphere, residing between 60km and 500km altitude. However, its not classified as layer in our atmosphere but one with an important goal.
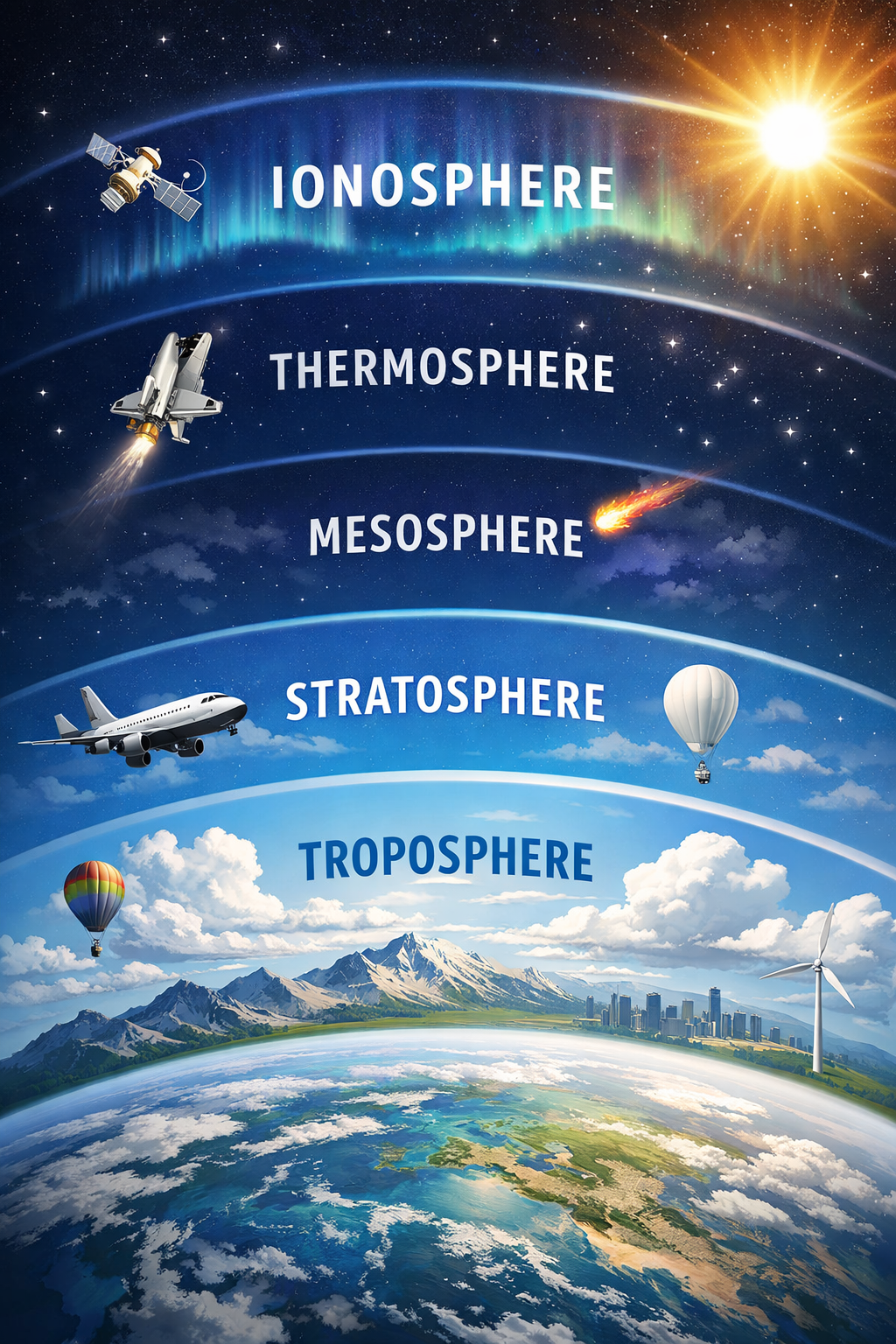
The balloon in the stratosphere is obviously an AI error. :)
Air pressure is a result of the mass/weight of the air. Because there is so much air above the earth which compresses close to the ground, areas with a lot of air molecues will be created. You can see this as a tower of jenga you played before. The weight of all the bricks pushes on the lower layers of bricks.
On earth we have several high pressure areas and low pressure areas which are an result of temperature differences. High pressure areas always wants to go to low pressure areas, just like when you pump up a tire and let go the vent. The air from the high pressure area inside the tyre will go to the outside, low pressure area.
So air pressure actually indicates the volume of air molecules in the area. The higher the pressure, the higher the volume of air molecules.
High pressure (H) and low pressure (L) areas are not absolute numbers, but relative to each other. For example:
When going up into the air, the air pressure will decrease like seen in the graphic below:
For reference, we will use this numbers:
As this is an exponential relationship, this will guide you through the first 10.000ft (3,048km) in altitude, after that this trick does not longer work correctly of course. Some good rules of thumb:
For more information about Pressure and Density altitude, check out: https://justinverstijnen.nl/ppl-theory-nav/
The sun is the engine of Earth’s weather systems. Because the sun radiates its heat onto the Eart, we have nice temperatures. Without the sun, we would live in a mean temperature of around -200 degrees celsius.
The sun radiates its warmth to the earths surface and that will warm up the air above it. This is the main reason why temperature decreases with an altitude increase (going up is going cooler).
For transport of warmth in Earths atmosphere we have different terms:
Let’s take a look at them all:
Radiation is the transport of warmth using electromagnetic waves. This is mostly sunlight that reaches the earths and uses infrared and UV radiation. Objects and air which absorb radiation will increase in temperature.
Convection is the vertical transport of warm air caused by the differences in air density. An result of convection is (thermal) updraft, the component of how gliders can stay in the sky.
Convection happens when the layer of air above the earths surface warms up greatly, and this warmer air will rise because of the lower density. Hot air balloons fly because of the principle of convection.
Turbulence contains unorganized horizontal and vertical airmass movements. These are caused by several inconsistences:
Also warm air can move around the atmosphere by turbulence, but the main difference is that in this case, the air density is not the main reason of transport.
Advection sounds really like turbulence, but then organized and on great scale. Advection is a result of horizontal movement of air by the wind and air pressure differences. Wind and air mass is advection.
Conduction is the transport of warmth by using physical contact. A warm object will conduct its warmth to a colder object using conduction. Because air is not a great warmth conductor, this happens the least of all transports but in combination with Convection its measurable.
To summarize all these forms of transport:
| Form of transport | Definition | Memory aid | Dutch translation |
| Radiation | Transport by electromagnetic waves | The sun | Zonnestraling |
| Convection | Transport of vertical warm air | Hot air balloon | Convectie |
| Turbulence | Unorganized movements of air masses | Bumpy airplane ride | Turbulentie |
| Advection | Organized movements of air masses | Clean airplane ride | Advectie |
| Conduction | Transport by physical contact | Wires | Geleiding |
The greenhouse effect is an effect caused by sunlight going through the ozonelayer, which is a layer in the Stratosphere containing water vapor, and heating up the ozone layer.
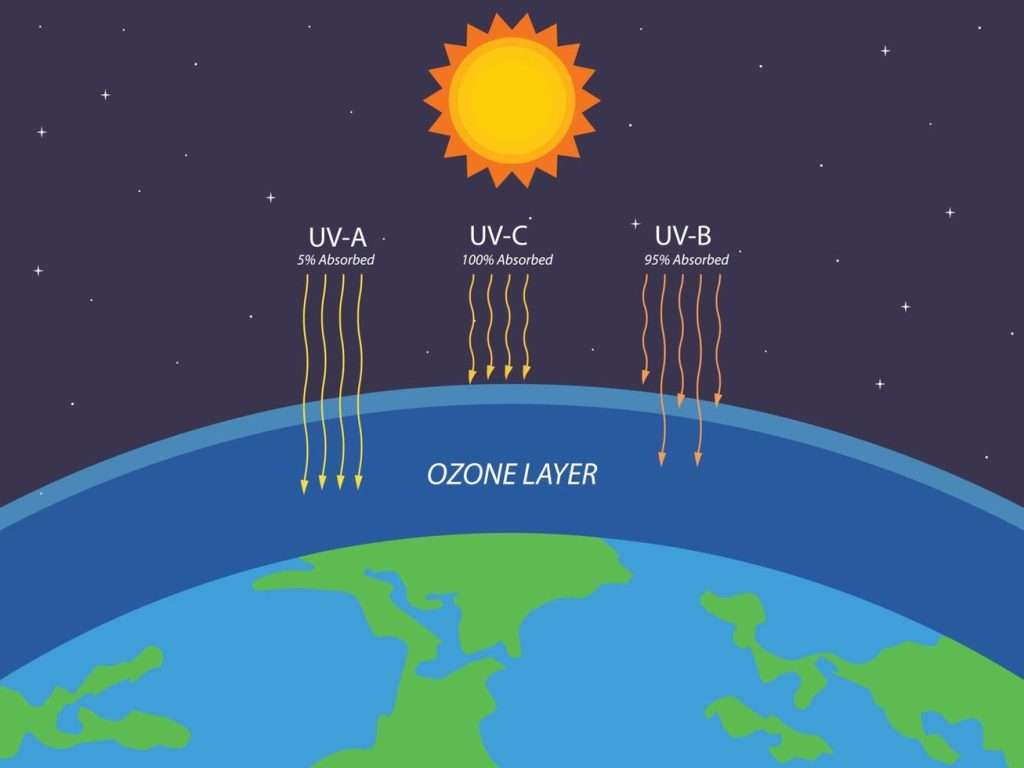
In the atmosphere, there is a very small percentage of moisture. This is around 0 to 5% of all the air, mostly a result of water vapor of surface water. The moisture in the atmosphere is the cause of all weather types, like clouds, thunder, fog, mist and thunderstorms.
Water exists in the atmosphere in 3 types:
The picture below shows all the phase transitions from ice, to water and or to steam:
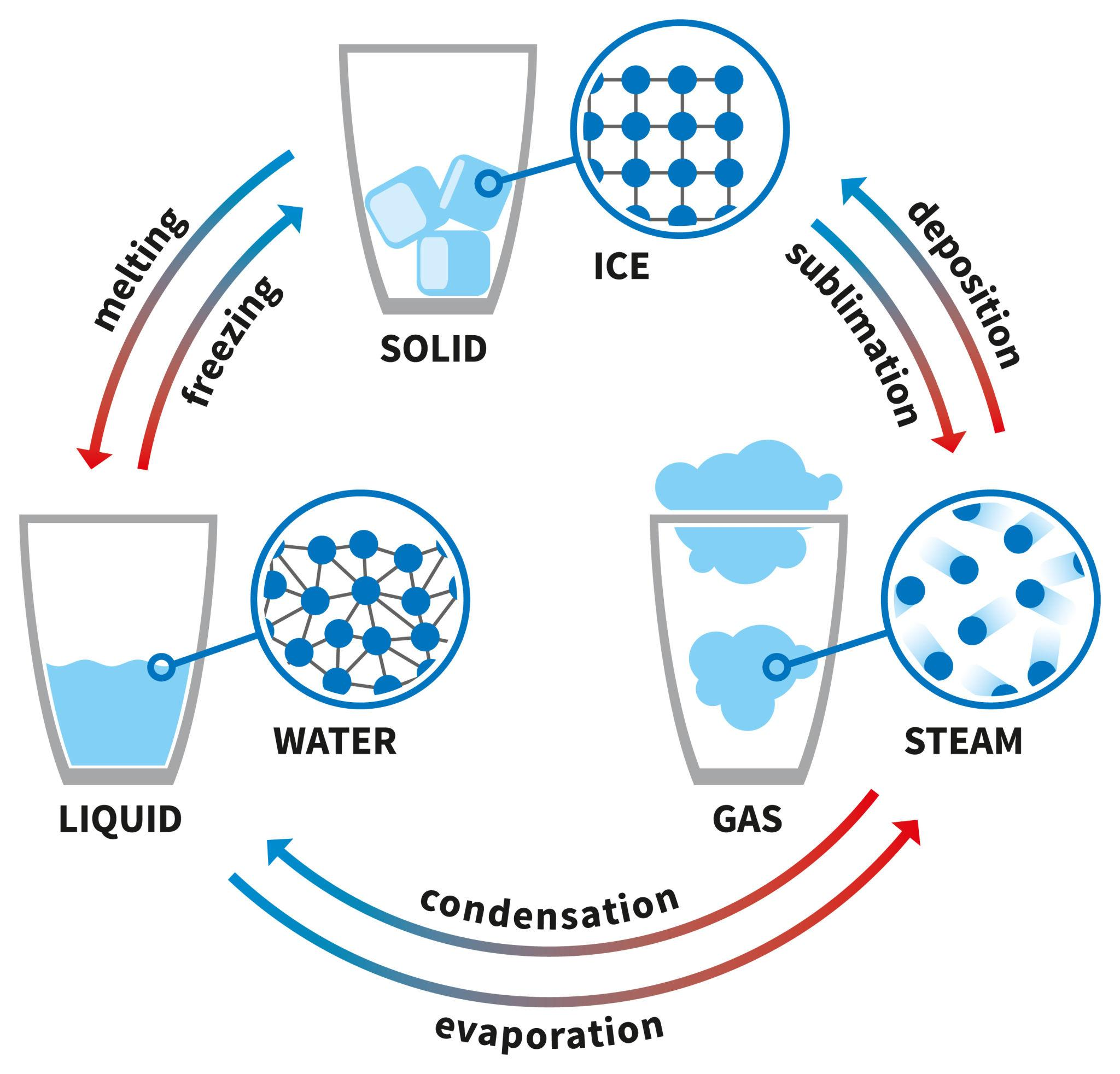
These terms will mean:
Easy to remember the terms:
Warmer air can hold more amounts of moisture. This is because the warmer air expands and is less dense, so more room for moisture. To measure the amount of moisture in the air, we can use 2 methods:
The relative humidity is a percentage that states how much percentage moisture is in the air based on the air temperature. While this is a percentage, it doesnt tell us something clear. This is because:
This is because the mass of air is filled with 75% of moisture, but a higher temperature means a bigger storage of moisture. A low temperature will hold much less because its more dense. As we actually want to have numbers that tells us everything about the state outside, we have invented the Dew point.
The relative humidity is mostly the highest at night/early morning and lowest at 4 o’clock at noon.
The dew point is an second temperature that is determined at the temperature and humidity. IIt tells us the amount of moisture in the air, by a sort of calculation from the actual temperature with an humidity percentage calculated up to 100% where the air is fully saturated by moisture. For example:
So the dew point tells us much more about the current air condition, and can be used to predict the height of cloud layers. Here I have a table that tells more about air temperatures and humidity and how it will actually feel:
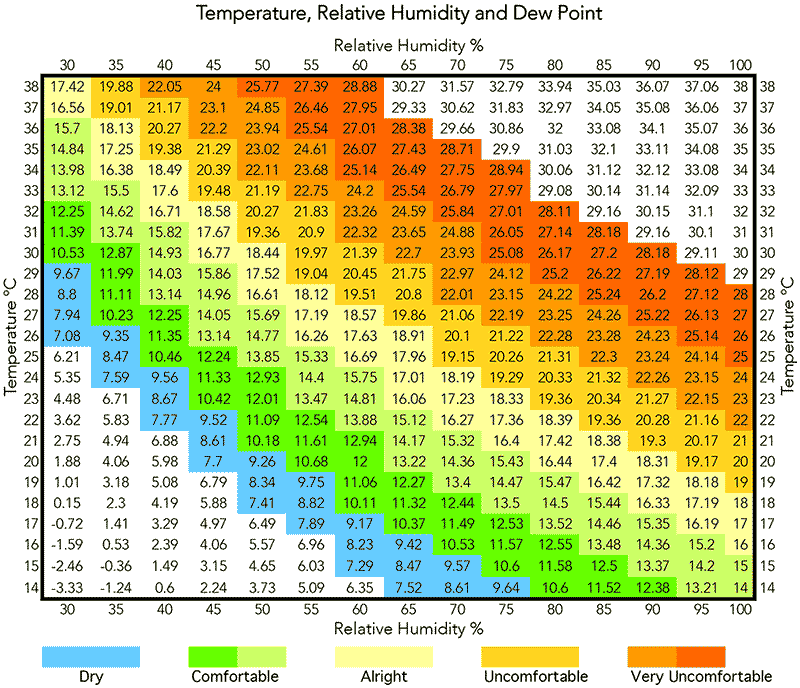
Vapor pressure is the pressure by vapor created by molecules in the air when evaporated. This is indicated in hPa. This is also one of the conditions used to calculate the relative humidity.
Vapor pressure is calculated from air temperature and relative humidity. For example:
We have a rough rule of thumb used in aviation to estimate the cloud base:
Temperature - dewpoint / 2.5 = answer ×1.000 is the cloud base in ft above ground level (AGL)
For example, the air temperature is 25 degrees and the dew point is 7 degrees.
25 - 7= 18 / 2.5 = 7,2 x 1.000 = 7200ft AGL
So we have horizontal movements of air masses called the wind, but we also have vertical movements. Vertical movements have also a great impact on the weather. The stability of the atmosphere decides if vertical movements happen or they are suppressed.
Stability means how the atmosphere reacts when air is pushed up or down vertically. We can have an unstable or stable atmosphere:
When a package of air rises, it will flow to an environment with a lower air pressure. The package of air will then expand, which costs a little energy. This energy source is the temperature. Cooling using temperature is called adiabatic cooling.
An adiabatic process is a change in the temperature of air without any heat exchange with the surrounding environment. You can see this as a temperature change within this air package:
As long as the air will not be saturated by water vapor, then this will be called a dry-adiabatic cooling. When the air is saturated by moisture, then this will be logically called wet-adiabatic cooling.
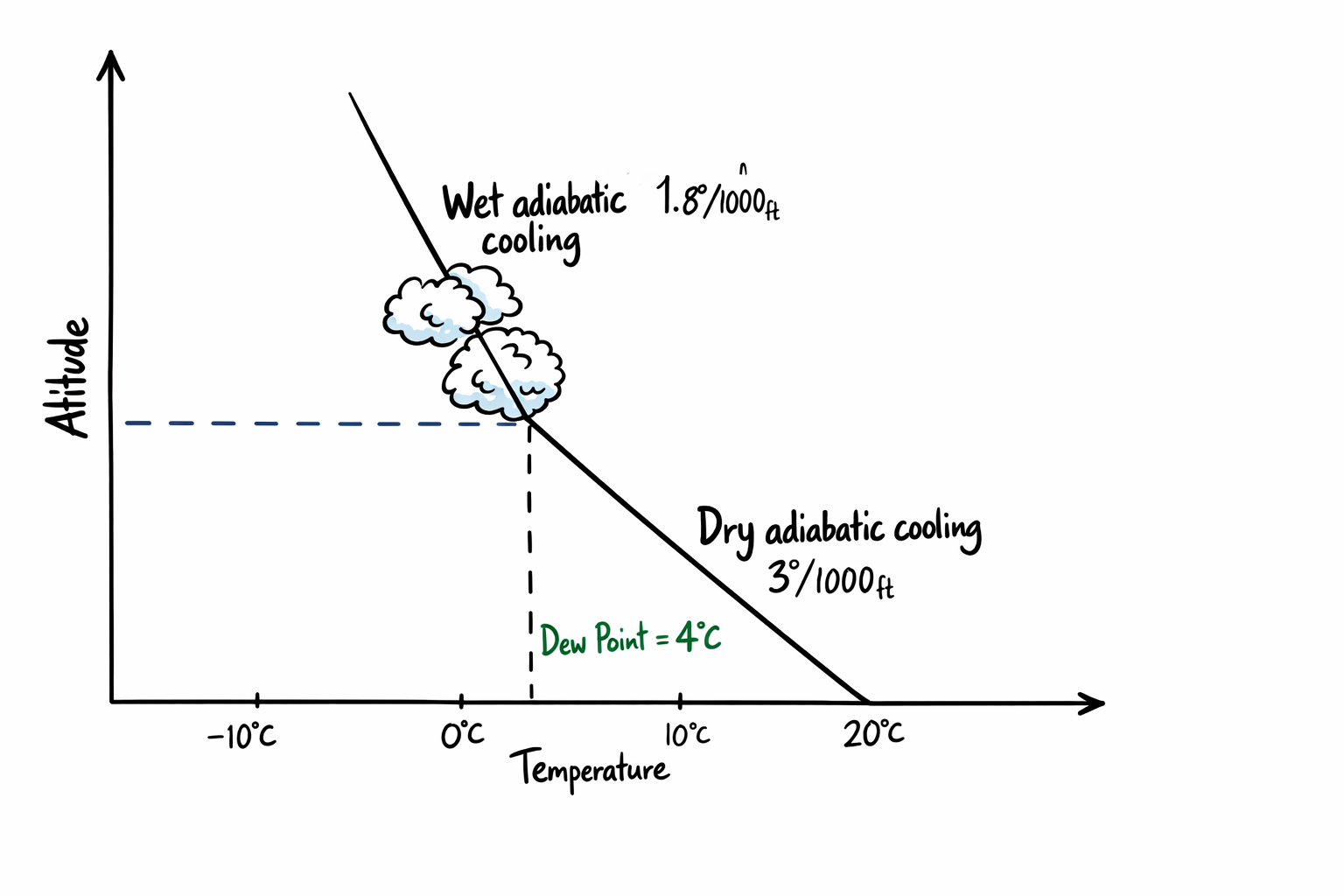
At the moment the air hits the dew point, the air becomes saturated with moist, condenses and a cloud has been born. The cooling rate will also decrease because of the condensing process releases warmth. Check out this moist lifecycle. You can calculate the dew point height with this formula.
The temperature gradient is a bit different as ISA describes, because of these adiabatic processes. It can also be that the temperature rises a bit and then decreases every X ft up. This is why we always speak about mean decreases.
To visualize this exactly, we have something called the “State curve”, the graph of the actual representation of the temperature gradient.
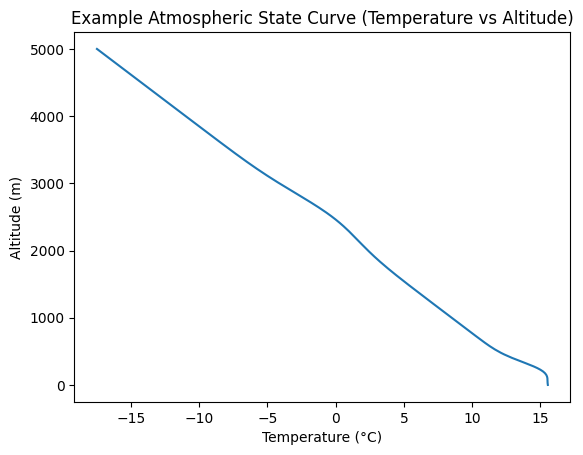
This state curve can present 4 types of stability in the air:
When we speak of absolute instability, then the temperature decrease is faster than a dry-adiabatic process. This is as we discussed earlier, more than 3 degrees celcius per 1000ft (1c per 100m). In this situation, the rising air package is warmer than its surroundings, so will continuously rise because of its lighter mass.
This is also a recipe for thunderstorms if the air is saturated enough. Air will continue to rise all the way to the Stratosphere creating cumulonimbus clouds.
When we speak of stability, the temperature of the atmosphere will cool down slower than a wet-adiabatic process. Here the atmosphere is stable and there is not much air rising. A possible rising package of air will cool down to its environment and will stay in its vicinity.
In a conditional instable atmosphere, the temperature gradient is between wet and dry adiabatic. Here the air is stable to call it a stable atmosphere but instable enough for a wet-adiabatic process. In the real world, this is the most happening situation.
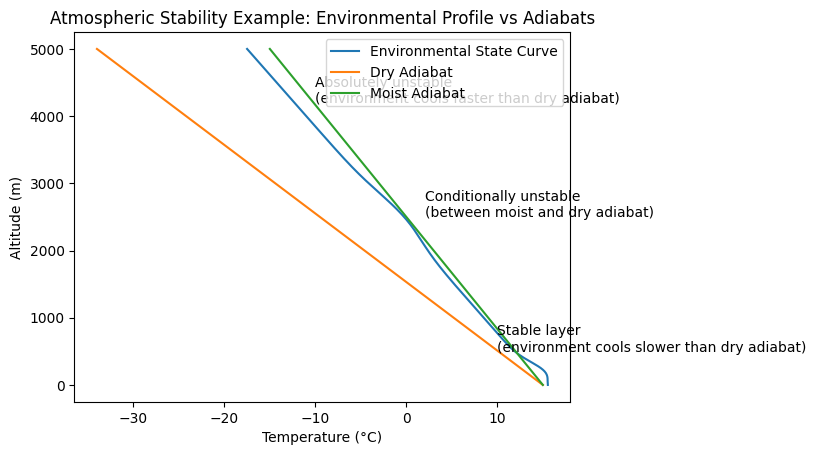
We have some processes in the atmosphere that influence the stability, mostly processes that cause warming and cooling.
The radiation inversion is when the sun heats up earths surface and the directly layered air. In the evening, the air cools down at earths surface but the air above the surface stays a bit warmer. This causes instability and is the reason fog starts at the ground in the winter/spring mornings. Basically a temperature increase in the temperature gradient, after the inversion, the temperature will decrease per ISA conditions.
Right above an inversion, the wind speeds can drastically change, as the atmosphere is a bit more unstable above the inversion.
Advection, which is horizontal transport of air, alters the stability of the atmosphere. This will do it in these ways:
| Stability | Cold surface and warm air |
| Instability | Warm surface and cold air |
The main causes of this are that a cold surface will cool the air above it. With a warm surface, the air in the lower areas will warm up, and warm air will tend to rise. This creates convection and if the air contains enough moist, clouds and precipitation.
The movements in the atmosphere are primarily caused by pressure differences, which are caused by temperaturedifferences. In the tropical region, there is a lot of sun during the year and gets a lot more sun than the artic regions. This creates a static pattern of air movements which is called the general circulation.
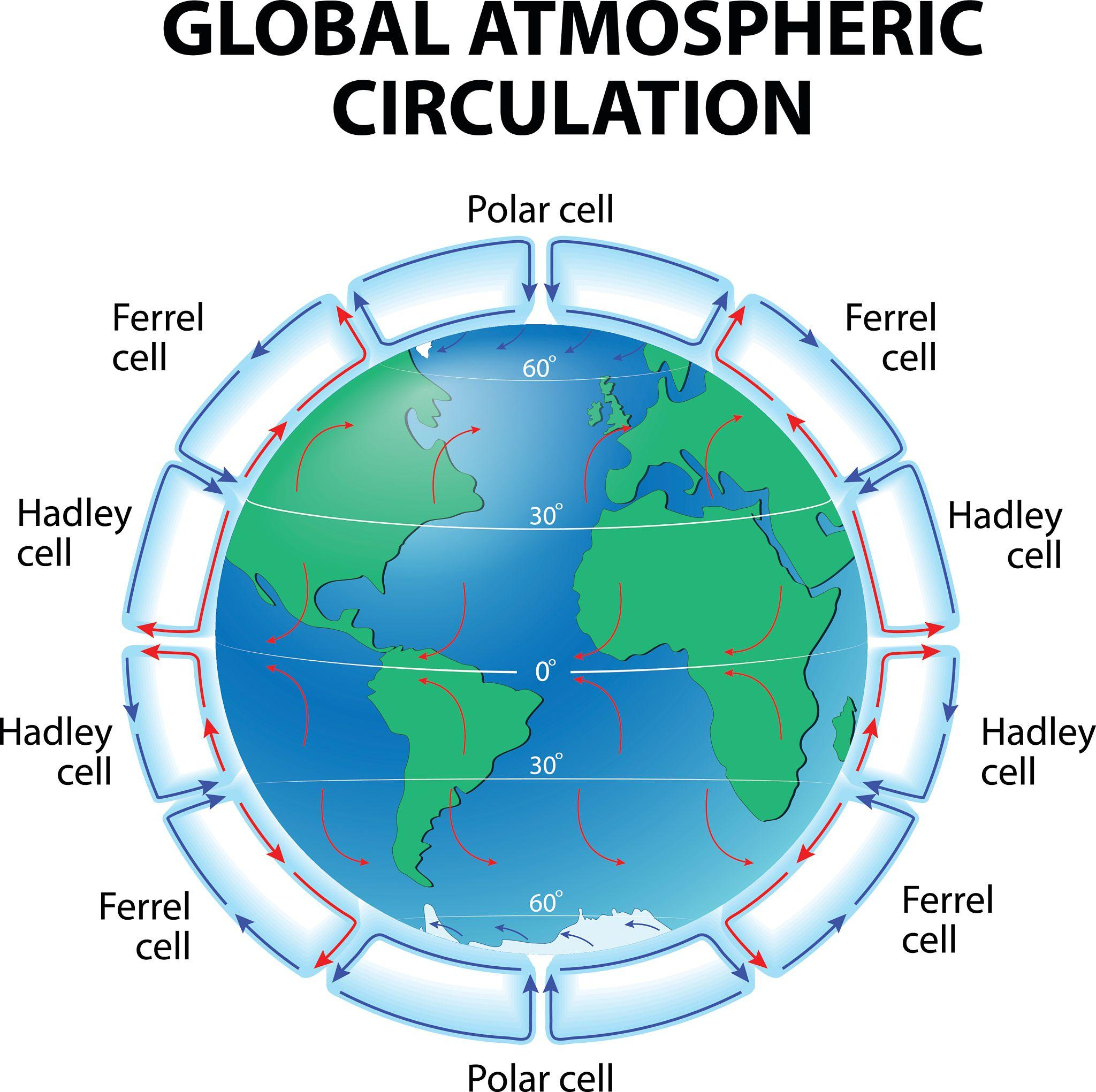
At the equator, the strong sun radiation will cause rising air, and the pressure at the ground decreases. In this ring of low pressure, called the intertropical convergention zone (ITCZ), warm moist air will rise and flows at great altitude to the north and south. After cooling and becoming dry, this dry air falls back to earth at the subtropicals, which are around 30 degrees north and south latitude. This is the line of the Saharas, canaries.
On every half of the glode, there are 3 vertical cells as seen in the picture above. We also call them circulation patterns. These patterns are there all the time, all year.
The air pressure at all places around the world is measured by weather stations. Some offices will link all those fields to each other to create a pressure map of the world. Because all weather stations have a different elevation to the mean sea level (in ISA 1013 hPa), this pressure will be calculated to this mean sea level, based on the current conditions. This gives us a new Q-code, the QFF.
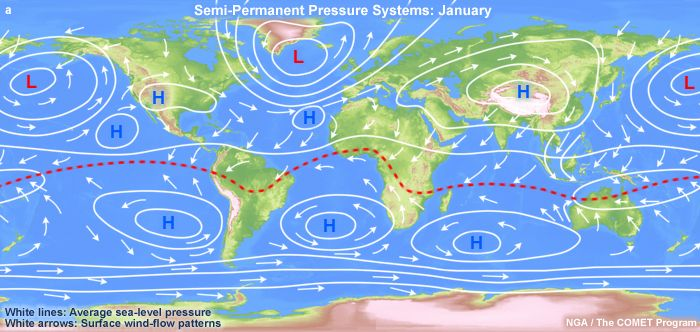
As we can see on the map, the world contains a lot of low and high pressure areas. The “H” or “L” is pointed at the center, or the highest or lowest pressure point of the area.
The curved lines you see are Isobars, which are lines with matching air pressure. The dutch KNMI will use an interval of 5hPa for these lines.
A High pressure area always have a ridge (rug) which is a extension of the high pressure area and looks like this:
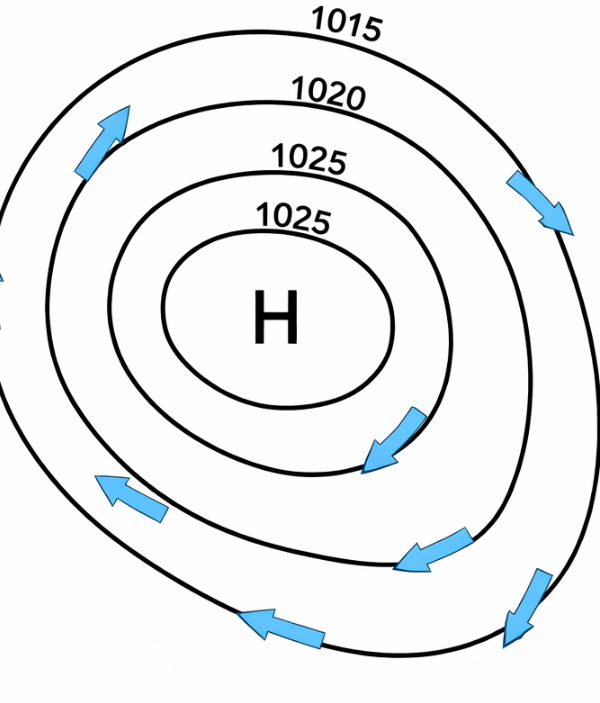
A low pressure area has a trough (trog) and means the extension of the low pressure area, again where the center of the areas at the “L” represents the area of lowest pressure:
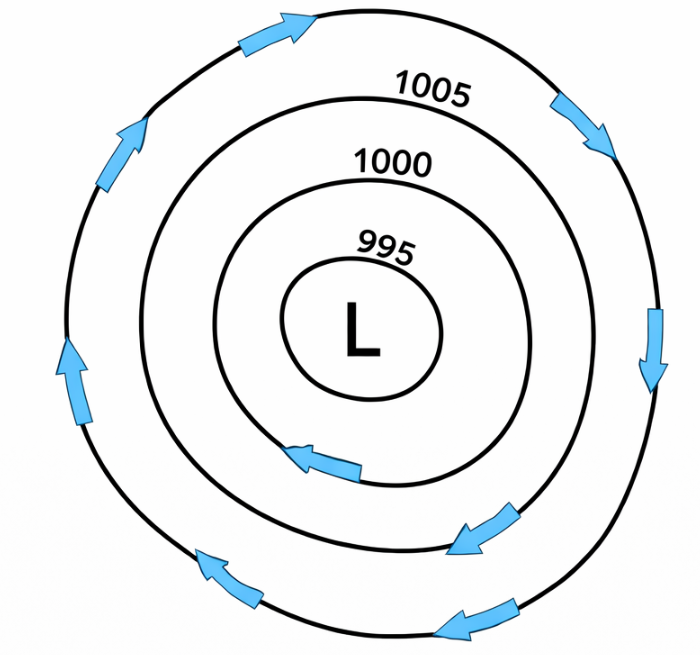
A col (zadelgebied) is an area that is surrounded by multiple high or low pressure area’s. In this area’s the pressure differences are small. In the chart below, we could see some cols :
Being in a col, you can expect light and variable winds, as the air of the pressure area’s want to go to the lowest pressure area.
A low pressure area is an area with closed isobars where at the center is the area of the lowest air pressure. A low pressure area can occur where in the higher atmospheric layers divergence takes place. This means that the air compensates and starts a vertical airflow from the ground up to the tropopause. This will cause the pressure at the ground to lower as the air molecules rise up. The rising air cools down and condensation will happen what causes clouds and precipitation.
A result of the lower air pressure is, because high pressure areas will always flow to low pressure (bicycle tire), that at the ground the air will move to the center of the low pressure area. This process is called convergence.
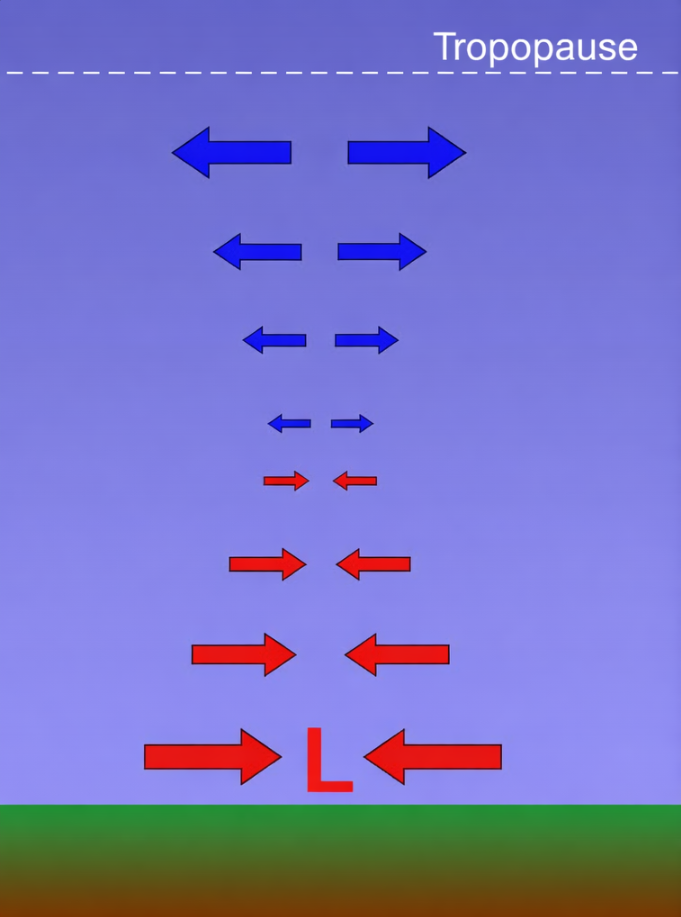
Other words for low pressure area’s are:
At the globe, the movement of air in a low pressure area can defer:
This circulation is called cyclonal, as it rotates the same way of a cyclone (which rotates counter clockwise at the northern hemiphere)
The cause of this difference is the Corioliseffect, a result of the globe which rotates. Air wants to go in a straight line from H to L, but as the earth rotates, these paths are curved. This is also visible at the chart above.
In an high pressure area the pressure at ground level is higher than in the direct area. High pressure areas occur in the general circulation like the Azores islands (West to Spain). High pressure areas can also occur above a cold ground mass. This is called a thermal high pressure area. As the atmosphere cools down, the colomn of air will shrink and air will converge at high altitude. This makes the mass of air heavier and the result of this is the mass of air falling down (subsidence) to the ground. A high pressure area is now born.
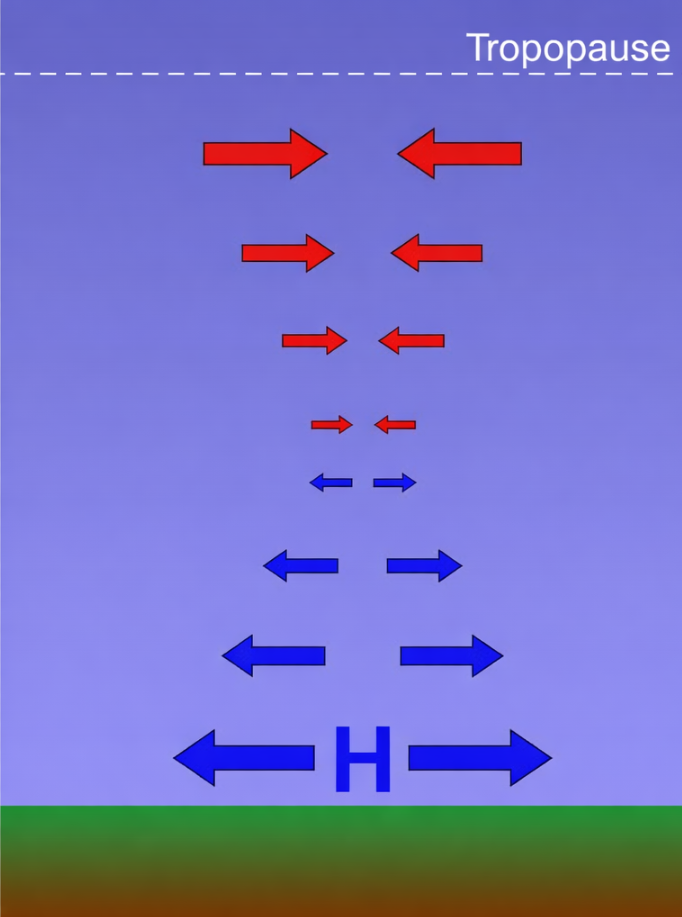
During subsidence, the falling air will heat up and will clear out clouds. Generally there is better weather in a high pressure area than there is in a low pressure area, but this is no warranty.
Subsidence can also cause an inversion, which happens a lot. The inversion will stabalize the atmosphere, stopping the vertical movement of air. The result is that water vapor, dust, sand or other air-pollution can not go anywhere and hangs at low altitude. A great example is haze or smog in big cities with warm weather during a high pressure area:

At the globe, the movement of air in a high pressure area can defer:
This circulation is called anti-cyclonal, as it rotates the opposite way of a cyclone (which rotates counter clockwise at the northern hemiphere)
Wind is the horizontal movement of air, caused by air pressure differences around the globe. We get air pressure differences because of temperature differences, where warm air expands and cold air contracts. Warm air causes the air pressure to become less as there are less air molecules per cubical meter and cold air causes the air pressure to become higher as more molecules will be there.
The wind is always measured in the direction where the wind comes from. In aviation we use a degrees measurement, where the number is always rounded to the closest interval of 10.
The windspeed is measured in knots which represents the amount of nautical mile per hour. The wind measured is a mean wind direction over a period of 10 minutes. With small winds, 3 knots or even lower, this could be indicated as “variable”. Gusts are momentary and more powerful forces of the wind and are indicated at the METAR if 10 knots or more above the mean windspeed.
We also have wind power indications, which are based on the beaufort scale but is not used in aviation as its not linear and not precise enough as you can see here:
| Beaufort force | Description | Wind speed (km/h) | Wind speed (knots) |
|---|---|---|---|
| 0 | Calm | 0–1 | 0–1 |
| 1 | Light air | 1–5 | 1–3 |
| 2 | Light breeze | 6–11 | 4–6 |
| 3 | Gentle breeze | 12–19 | 7–10 |
| 4 | Moderate breeze | 20–28 | 11–16 |
| 5 | Fresh breeze | 29–38 | 17–21 |
| 6 | Strong breeze | 39–49 | 22–27 |
| 7 | Near gale | 50–61 | 28–33 |
| 8 | Gale | 62–74 | 34–40 |
| 9 | Strong gale | 75–88 | 41–47 |
| 10 | Storm | 89–102 | 48–55 |
| 11 | Violent storm | 103–117 | 56–63 |
| 12 | Hurricane force | 118+ | 64+ |
You could ask yourself why we measure and indicate the wind like this. If the wind blows to the north, it would be easier to say northern wind. In aviation we want to take-off and land our aircraft from a certain runway and favorite a runway with headwind (not with tailwind). This runway has a number corresponding to the magnetic course/direction it points at. By indicating the wind like this, the number is liked pretty much to the wind direction.
For example:
Taking off and landing with headwind (tegen de wind in) increases our true airspeed and decreases our ground speed, making those maneuvers a lot easier as we have less speed according to the ground.
Wind can do veering and backing, which both have a certain definition:
This will actually say nothing about the wind speed, only the direction.
The coriolis effect is a result of curvy winds as result of the rotation of the earth. This effect has the most presence at the poles and the less at the equator. This happens as air travels to the poles, but the turning speed there is much slower than on the equator.
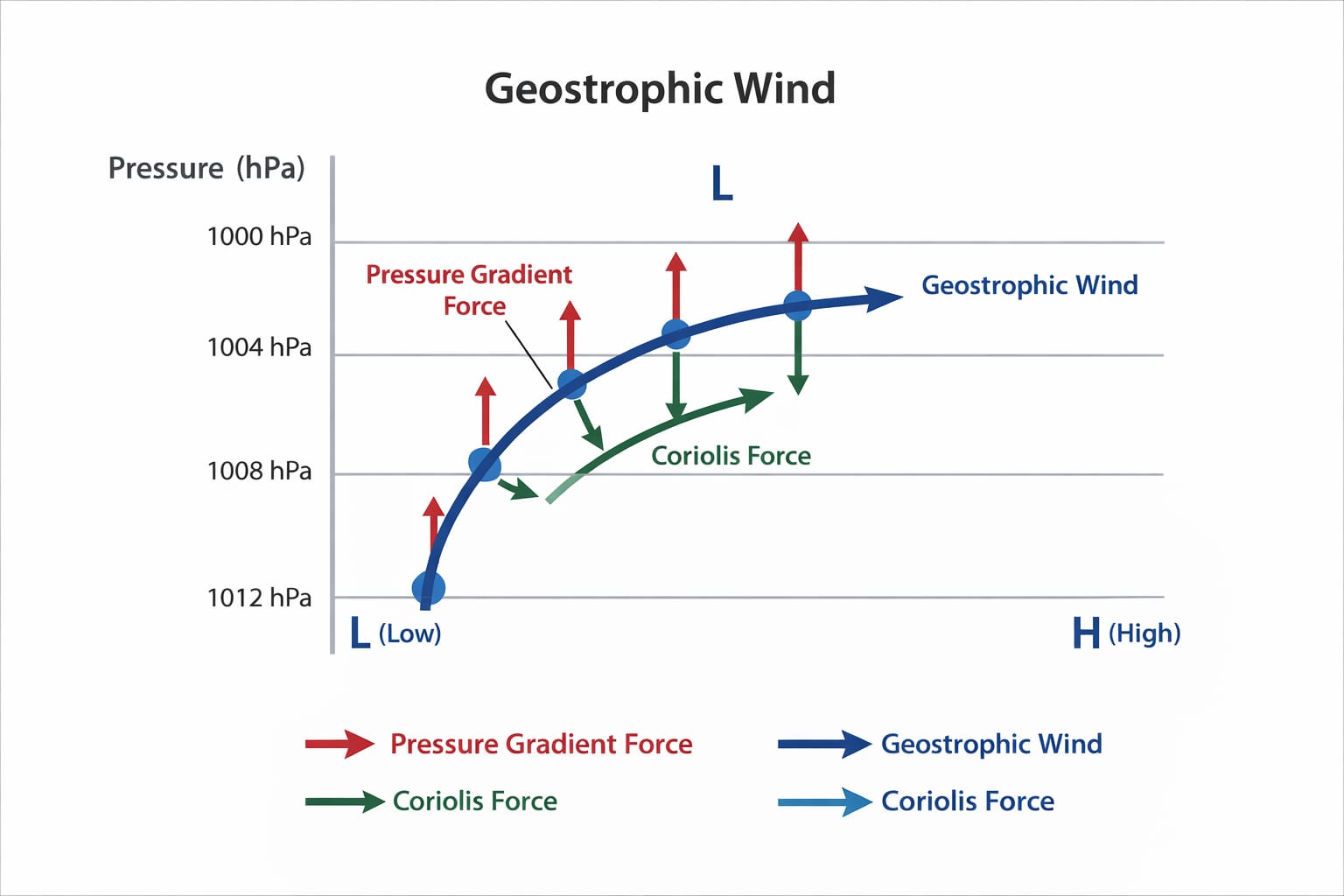
In this illustration, we can see several different details here about winds and high/low pressure areas. We will look at all details applying to the northern hemisphere. In the southern hemisphere, all details are reversed.
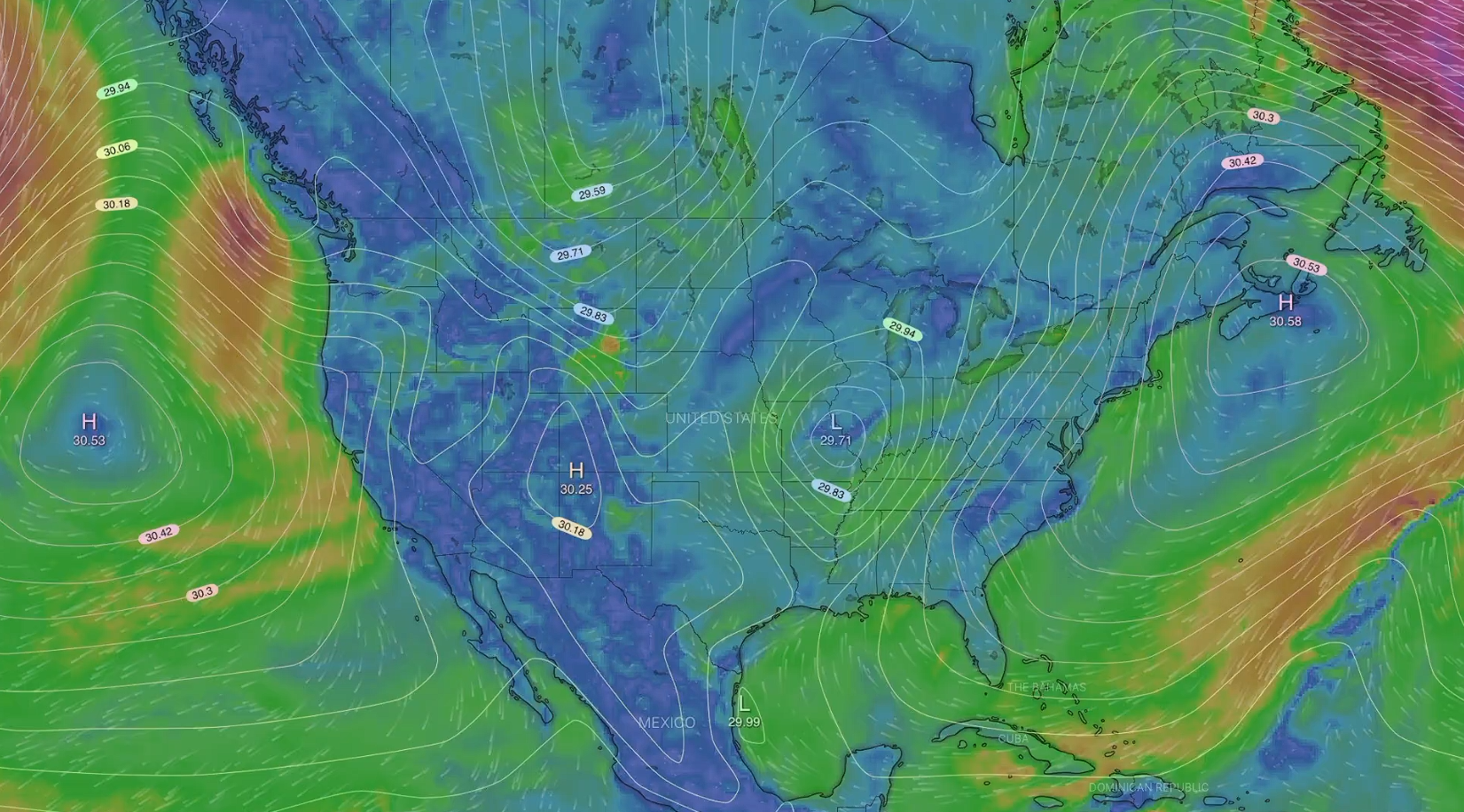
This tool is called Windy.
One fact applying to the whole earth is that areas with isobars close to each other represents areas of high wind speeds. Just look at cyclones which are a low pressure area (the L south west of Iceland):
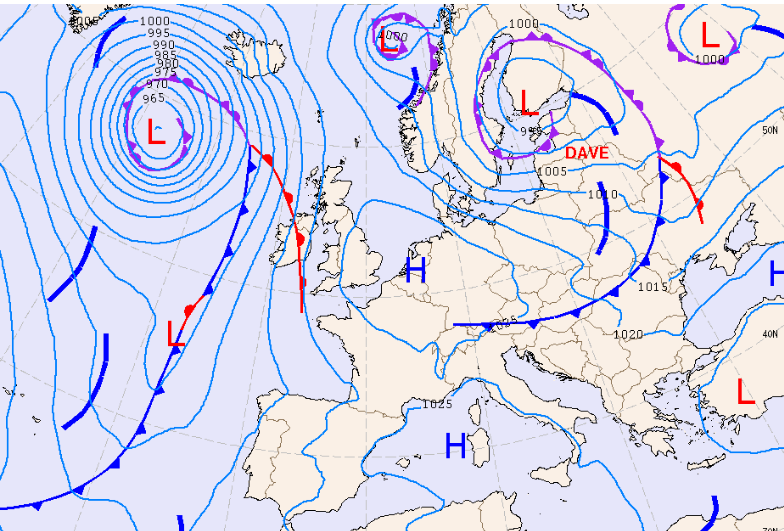
Around the earth, we have various wind patterns that are happening on recurrence. We know art least three of them:
Fun fact, now you know where car brand Volkswagen got their names from :)

We also have some small circulation patterns of the wind because of small geographical situations. Think of these situations:
We will now describe them all and look at their characteristics
Seawind circulations occurs when a big temperature difference exists between sea water and land. The sun will heat up land way faster than sea water and the temperature above land will increase faster. Above land, the air will rise (Convection) and results in a thermal low air pressure area, because of the air expanding due to the heat.
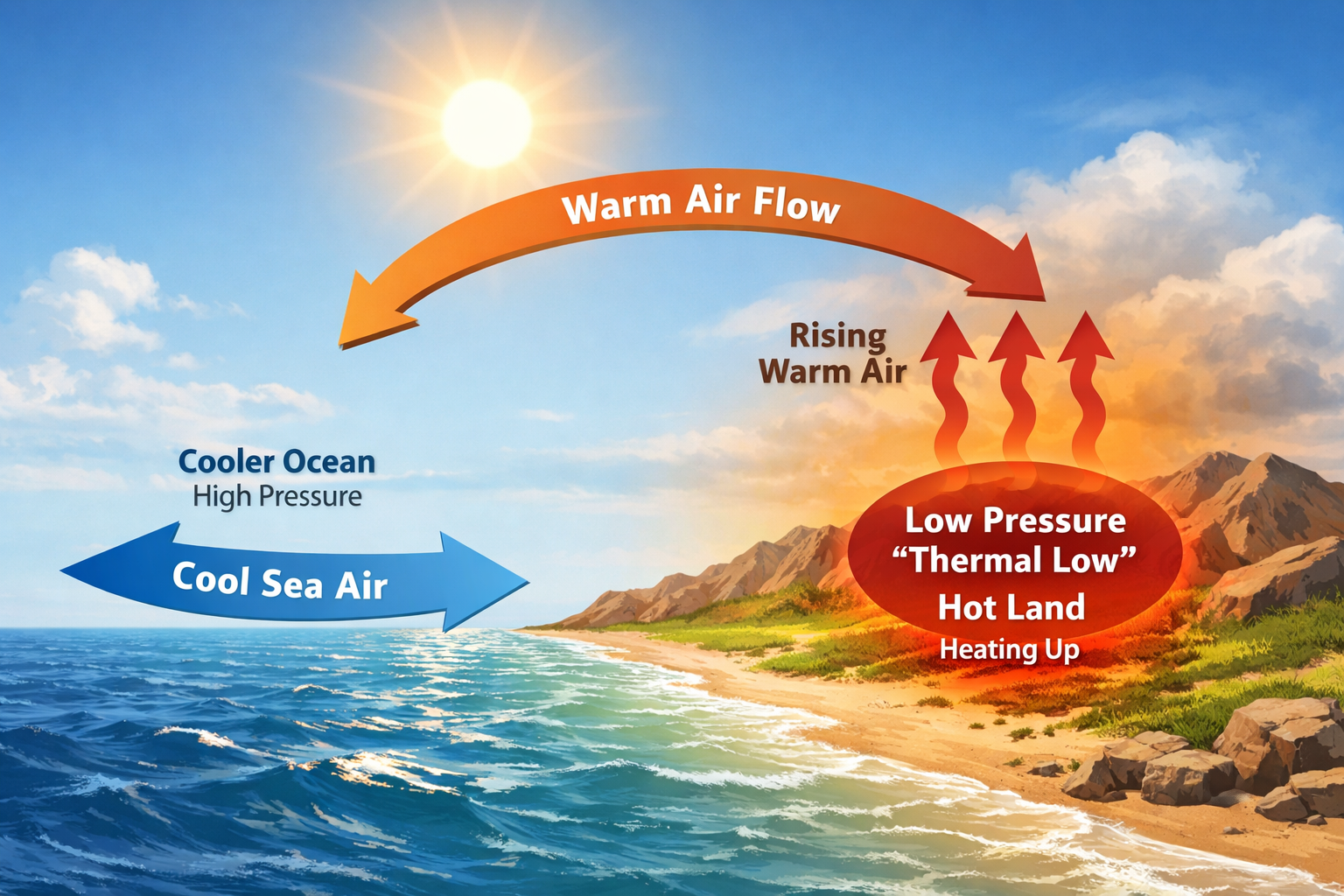
As the air pressure at sea becomes a bit higher and on land, a small wind will now occur. As we already know that air from a high pressure area will always flow to a low pressure area, sea wind is now created. The barrier between the cold sea-air and warm land air is called the seawind front.
Sea wind circulation mostly happens in the spring, where the sea water is relatively cool and the sun radiation is strong enough to heat up the land, creating the temperature and resulting air pressure differences. Also these winds are also affected by the coriolis effect. The winds of the sea can reach several kilometers into land (up to 50km, based on the ground resistance).
These seawinds can cause some turbulence and wind shears and on the sea, some cumulus clouds can form. Sometimes with precipitation (neerslag).
In the mountains and valleys, we have huge sun radioation and resulting temperature differences which cause a lot of thermal high and low pressure areas.
We have 2 definitions to know here:

At the Canary Islands, most islands have this as primary climate where at the north the clouds and precipitation comes to the islands but are held back by the mountains. At the south side of the islands, the weather is a lot better and more dry. To describe the full process:
The fohn is a name for the dry katabatic wind that flows down from the mountain top down to the valleys. The fohn name is mostly used in the Alps to name the warm winds from the Mediterranean Sea but the effect/result is the same.
Because of this air flow, this can cause mild to severe turbulence above those mountains.
Mountain waves will occur when the flow of air is pushed over a mountain ridge (bergrug). If a stable layer of air is present, the passage will back down. This causes a golf pattern which can be measured even several hunderd kilometers after the mountain ridge. Mountain waves will be caused in these conditions:
Under the mountain waves, behind the mountain ridge and somewaht under the tops, a rotor will occur. Just like what happens at a plane-wing creating lift and stalling somewhat.
This mass of air rotates under a horizontal axis and wind speeds can be massive. Upward and downward speeds can be thousands of feet per minute and causes a lot of turbulence.
In dry air, this rotor is not visible, but with humid air they can cause rotary clouds. They look innocent but can blow with a lot of winds and cause severe turbulence. They look a bit like lenses of a camera.

The venturi effect is wind that is forced to flow through a narrow space, causing the wind speed to increase and the air pressure to decrease. This seems not very important, but if flying there, the altimeter can indicate a lot higher altitude than you are actually flying. This difference can be hundreds of feets.
A valley inversion is just like a normal inversion, but then in mountain-rich areas. The can occur in these conditions:
Valley inversions have several dangers for aviation which other inversions also have, like poor visibility, thick layers of clouds and high wind speeds at the upper side with windshears and turbulence. Taking into account you are flying in a mountain-rich area can cause huge accidents which pilots must be aware of.
Wind shears are rapidly changes of wind speeds and directions. Wind shears can be horizontal and vertical and will affect the way the plane flies. As we need air speed, including winds, to fly we need a flow of air. But if that flow of air is interrupted instantly, our speed and or altitude can result in a major decrease. We don’t want this when taking off or landing.
The 5 most important causes of wind shears are:
Wind shears can occur at every altitude, but are the most dangerous above the ground like in take-off and landing.
You know, planes fly because they have a speed in the mass of air they are flying into. This is called the True Airspeed (TAS). If we have a ground speed of 70 knots and a headwind of 30 knots, the resulting TAS is 100 knots. If that headwind suddenly changes from 30 to 0 knots, our speed will decrease 30 knots. This causes our plane to create a lot less lift, resulting in a sudden descend. You can imagine as this happens feets from the runway, this can cause severe incidents.
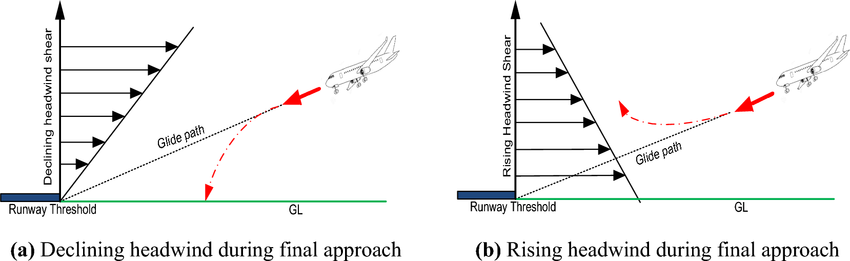
We speak of a low level windshear if this happends 1600ft AGL (500m) or lower.
The wind never flows from A to B in a horizontal line with a constant speed. By buildings, forests, obstacles, heating and instability (all called ground resistance) or different layers of air, the wind will get an unorganized flow. This is called turbulence.
Turbulence has several causes:
We classify turbulence into 3 categories:
As every type of plane is built different, so is the level of what you feel. An Boeing 737 is less likely to feel turbulence than a Cessna 172.
An air mass is a collection of air with equal temperature and humidity spanning several hundred kilometers. An air type has a area of source which is a great area with similar elevation. The mass must be long enough to stay in that area. Examples are:
The source of the air mass is deciding the results of the air type. If this is moving, the properties will change. This process is called transforming and the properties will change from the source of air to its transfomed state.
The area’s of source which decide the weather in the Netherlands (and the rest of Europe) are:
We have some definitions for different air types which we call in a certain abbreviation:
An combination of these is used when we say the cold eastern wind in the Netherlands is cPL. Continental, polar air.
A full table of all possibilities and definitions:
| Air Mass Type | Season | Characteristics | Weather |
|---|---|---|---|
| cAL (continental Arctic) | All year, except in summer | Cold air mass | Stable weather (cold, dry air) |
| mAL (maritime Arctic) | All year, except in summer | Cold air mass | Cold, often unstable weather; stormy winds. Showers. Good visibility |
| cPL (continental Polar) | All year | In summer warm air mass (CM), in winter cold air mass (CM) | Dry air. In winter very cold, in summer very warm. Little cloud cover |
| mPL (maritime Polar) | All year | In summer cold air mass (CM), in winter usually warm air mass (WM), sometimes CM | Moderate temperatures, humid. In KM: cumuliform clouds with showers. Good visibility |
| cTL (continental Tropical) | All year, but mainly in summer | Usually warm air mass (WM); in a warm summer sometimes CM | Warm and dry. Little cloud cover. Due to dust content, visibility often moderate or poor |
| mTL (maritime Tropical) | All year | Usually warm air mass (WM); in a warm summer sometimes CM | Warm and humid. Layered clouds, possible drizzle; mist. Especially in summer (CM) thunderstorms. Due to high humidity visibility moderate or poor |
CM = cold mass WM = warm mass *Abbreviations in Dutch
Because of cold mass will be heated and warm mass will be colled down, this can have some consequences for the vertical stability in the atmosphere. They can result in precipitation, clouds and fog.
| Property | Cold Mass | Warm Mass |
|---|---|---|
| Stability | Unstable structure | Stable structure |
| Wind | Gusty | Steady |
| Wind change with height | Little | Considerable |
| Turbulence | Light to moderate | None or very light |
| Clouds | Cumuliform, convective | Stratiform |
| Precipitation | Showers, possibly thunderstorms and hail | Drizzle, light snow |
| Visibility | Good outside precipitation | Moderate to poor |
Clouds will occur when warm rising air is cooled down by adiabatic processes. By cooling down air, the water vapor will condensate to water which is the cloud itself and can be in the form of rain. Because warm air can hold more moist, all of this moist is colled down and a cloud is born.
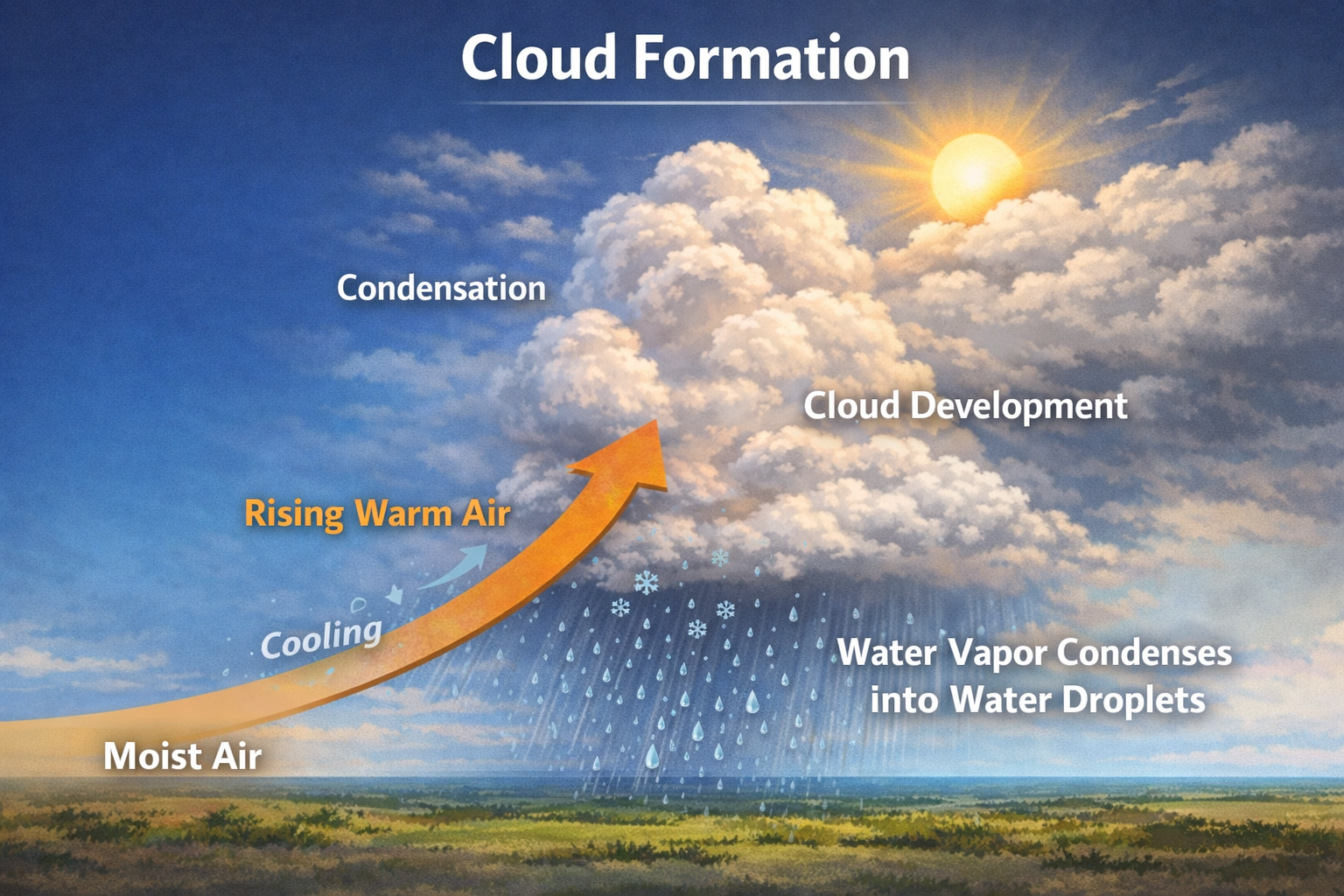
Condensation occurs when air is saturated with water vapor, so cooling to the dew point. In clean air, this happens far beyond the dew point. The proces will goes much faster if there are condensation nuclei (condensatiekernen) in the air. Types of those condensation nuclei are:
Clouds appear in rising air which is cooled down by adiabatc processes, and then saturated with water vapor. If the air has condensation nuclei, this goes faster into liquid water.
There are multiple causes of why air masses will rise into the air. Lets take a look at them:
The type of clouds generated is dependent on the stability of the atmosphere.
Condensation level: with decreasing air pressure when going up, the dew point will also decrease. This decrease is about 0,6 degrees celcius every 1000ft.
Every 400ft up, the temperature and dew point will come together by 1 degree celcius.
As result of condensation of water vapor, there will be a lot water droplets (0,01 to 0,1 mm). These droplets will stay liquid if they stay above 0 degrees. Under 0, they can freeze but will most likely not be directly. Most water dropleys will freeze after being -12 degrees celcius, after being undercooled water. This is water that is under the freezing point, but not freezing because of moving or not enough oxygen.
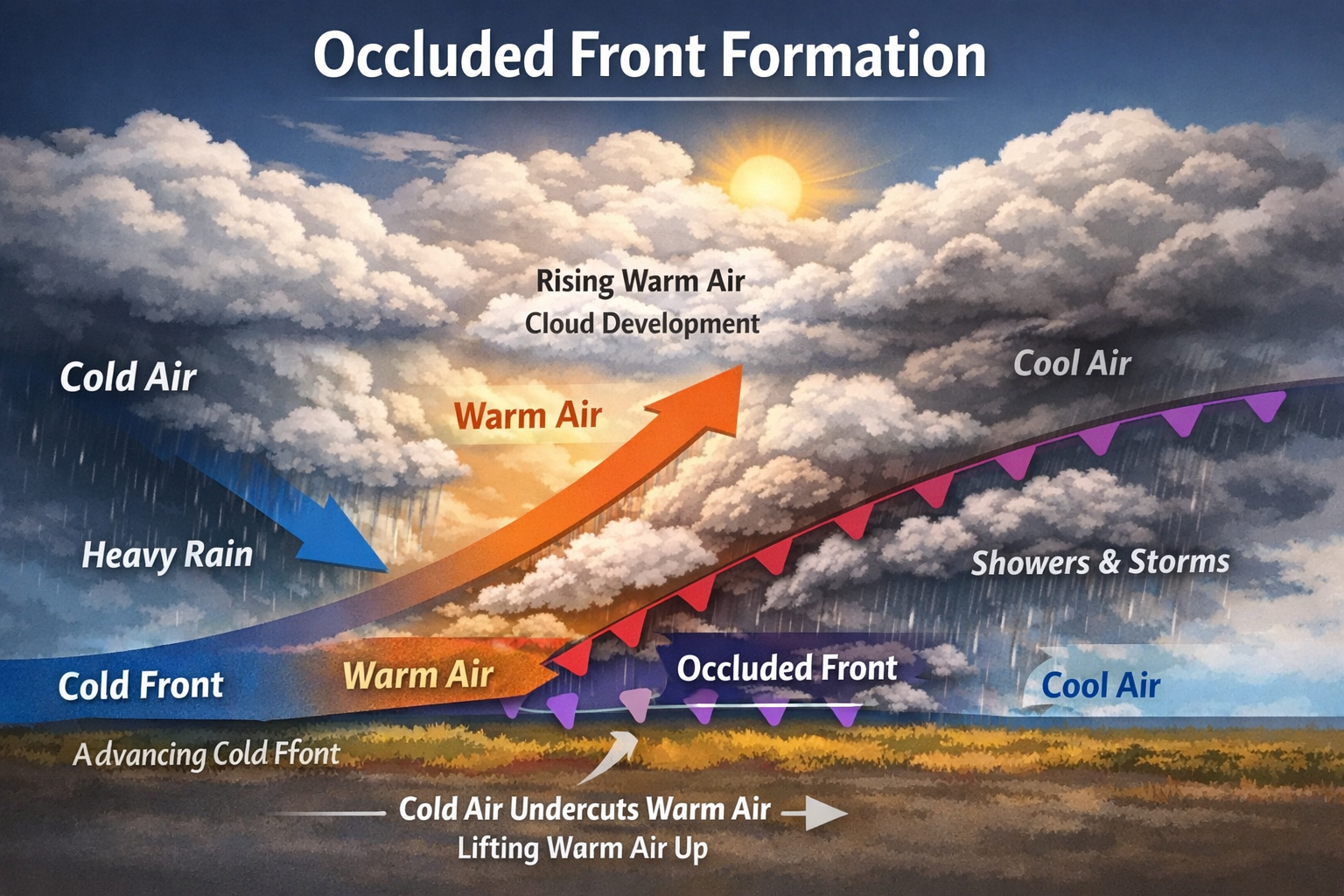
There are clouds like the cirrus which only are made of ice crystals because of the altitude where they reside. Water droplets and crystals are called cloud elements.
Clouds that are completely made of liquid water are called water-clouds. If clouds are partly made of water and ice, they are called merged clouds. For ice clouds, they are logically made up of ice.
Clouds are categorized into 3 levels based on their altitude and they partly get the name from the height and then a suffix of the cloud type.
| Level | Cloud base | Genera |
|---|---|---|
| High-level clouds (Cirro) | 5 km+ 16.000ft+ | Cirrus (Ci), Cirrostratus (Cs), Cirrocumulus (Cc) |
| Mid-level clouds (Alto) | 2km - 7km 6.500ft - 23.000ft | Altocumulus (Ac), Altostratus (As), Nimbostratus (Ns) |
| Low-level clouds | 0 - 2km 0 - 6.500ft | Stratus (St), Stratocumulus (Sc), Cumulus (Cu), Cumulonimbus (Cb) |
Here I have generated a nice legenda which contains the most occuring types of clouds and their altitudes to better map them and give a better understanding than a table:
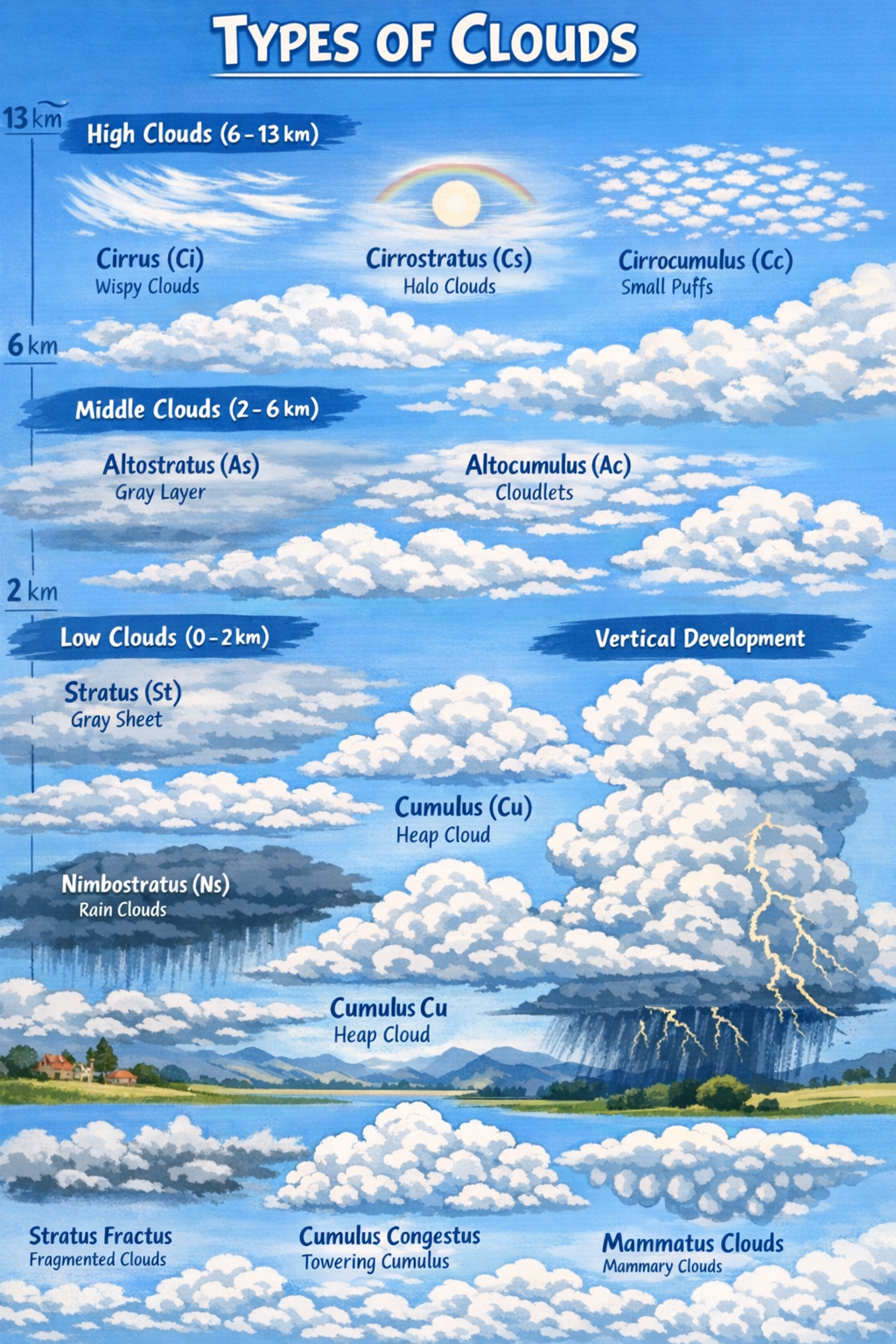
A good rule of thumb is that Cumulus clouds are formed by convection (unstable atmosphere), and Stratus type clouds formed by stable atmosphere
To train my eye a bit better, I went through my picture gallery and searched if I could find the cloud types in my pictures which was really fun to do. I always liked to take pictures of clouds and sunsets because they can sometimes be a piece of art.
Here I have a picture full of cumulus (stacked in Latin) clouds, everybody seen them a lot during summer days:

Immediately gives away why they are called “cumulus”. They are stacked/cumulative clouds.
Very boring rain clouds, which everybody seen a lot in their lives:

Nimbostratus clouds can be present on any layer, but from the ground we see the lower part only. These are clouds which drop water and can be present in a warm-front.
These clouds are called “stratus”. This is latin for “layered”.

This is a clear and big layer of the same level clouds in the low altitude region.
The altostratos is a combination of “alto” which means high altitude and “stratus” which means layered in Latin. This gives us high-layered clouds:

Altostratus clouds are mostly present when a warm-front is near and coming.
The altocumulus clouds are a combination of “alto” which means High and “cumulus” which means stacked in Latin. They look like this:

There are multiple types of clouds in this picture, but the most are altocumulus. These are the small clouds in groups. They can indicate some instability on medium height but are not a direct danger for flying VFR.
Cirrus means “hair” in Latin, and are the thin and high level clouds you see often during the summer. They are mostly ice crystals because of their high altitude.


The so-called “chemtrails,” like seen in the picture above which are actually frozen water vapor resulting from aircraft burning fuel, are part of cirrus clouds.
The mother of all clouds, present in all 3 layers and the most dangerous clouds for the ground and aviation are cumulonimbus clouds. These can span from around 1.000ft up to the end of the troposphere and are clouds containing thunder, heavy rain, heavy winds(shear) and hail.

Here we have a big one, photographed from a plane at 37.000ft above Portugal in rain season. Not knowing about the dangers of this cloud type back then but thought it was really cool.

This one is from a summer evening with predicted thunderstorms within 15 minutes. It does show a nice view with the collided cloud layer at the top, all the way to the ground surface with already ongoing precipitation. Minutes after taking this picture, heavy rain was falling and some thunders too.
In aviation, the general guideline is to stay away at least 15-20 NM from these type of clouds, even with a Airbus A380.
A towering cumulus is a cumulonimbus in a developing stage. A cumulus cloud which is building up, and looks like a cauliflower at the top. In METARs this is also described as TCU at the cloud type definition.

Precipitation means neerslag in Dutch and is everything that falls out of the clouds onto the ground. Think of:
Precipitation occurs when the cloud elements expand due to several reasons into bigger precipitation elements, which will be heavy enough to fall down due to gravity. A cloud always contains water vapor, but only when this vapor is combined into bigger water droplets, they will reach the ground.
To further clarify which precipitation we could expect from a certain cloud, let’s take a look at this table:
| Precipitation type | Dutch | Cloud origin |
|---|---|---|
| Drizzle (DZ) | motregen | Stratus (St) |
| Rain (RA) | regen | Nimbostratus (Ns) or Cumulonimbus (Cb) |
| Snow (SN) | sneeuw | Nimbostratus (Ns) or Cumulonimbus (Cb) |
| Snow grains | motsneeuw | Stratus (St) |
| Snow pellets | korrelsneeuw | Stratocumulus (Sc) or Cumulus (Cu) |
| Hail (GR) | hagel | Cumulonimbus (Cb) |
Clouds can disappear in various ways and reasons. This is comparable to the disappearance of fog/mist.
For describing the cloud base in aviation, we use 3 terms:
We use a coverage called in octa’s, where a visual viewer/system will look into the air and divides it into 8 parts. Then it determines how many parts are filled with clouds and makes a representation:
| Code | Term | Sky condition | Okta range |
|---|---|---|---|
| CLR | Clear | Clear sky | 0 |
| FEW | Few | Nearly clear sky | 1–2 |
| SCT | Scattered | Partly cloudy | 3–4 |
| BKN | Broken | Mostly cloudy | 5–7 |
| OVC | Overcast | Fully overcast | 8 |
The cloud base is the altitude above ground level (AGL), mentioned in feet (ft). This will be the lowest cloud layer.
The cloud ceiling is the altitude (below 20.000ft)which covers more than half of the sky, so broken clouds (BKN) or overcast (OVC).
If the sky cannot be seen due to fog or mist, there will be a vertical visibility mentioned in feet. This can be measured or estimated.
In the METAR of an airport, the cloud types itself will only be mentioned if significat, like a Cumulonimbus (Cb). The cloud types are used in meteorological messages like in the Dutch general aviation weather bulletin: https://www.knmi.nl/nederland-nu/luchtvaart/weerbulletin-kleine-luchtvaart
Thunderstorms is a phenomenon that brings huge dangers for aviation. Thunderstorms only exists in cumulonimbus clouds which bring huge rising and descending winds, turbulence and heavy rain or hail with it. The biggest threat is a thunder strike into the plane, where risks of fire or blindness can occur.
The Netherlands knows around 25 thunderstorm days per year, espexcially over land.
Cumulonimbus clouds are built upon cumulus clouds in a unstable atmosphere which can continue to grow up. We have a towering cumulus cloud type, this is a beginning stage of a cumulonimbus (Cb) which can also be seen as altocumulus castellanus (Acc), which happens with instability on mid-level. This looks like this:

You will see in an nutshell where this name comes from, a castle wall.
Thunder is a electric load from a cumulonimbus cloud. This phenomenon happens when the mass will hit the ground resulting in a flash and a very loud and sharp sound.
The layout of a thunderstorm is like how the air movements will be started:
A thunderstorm knows 3 stages:
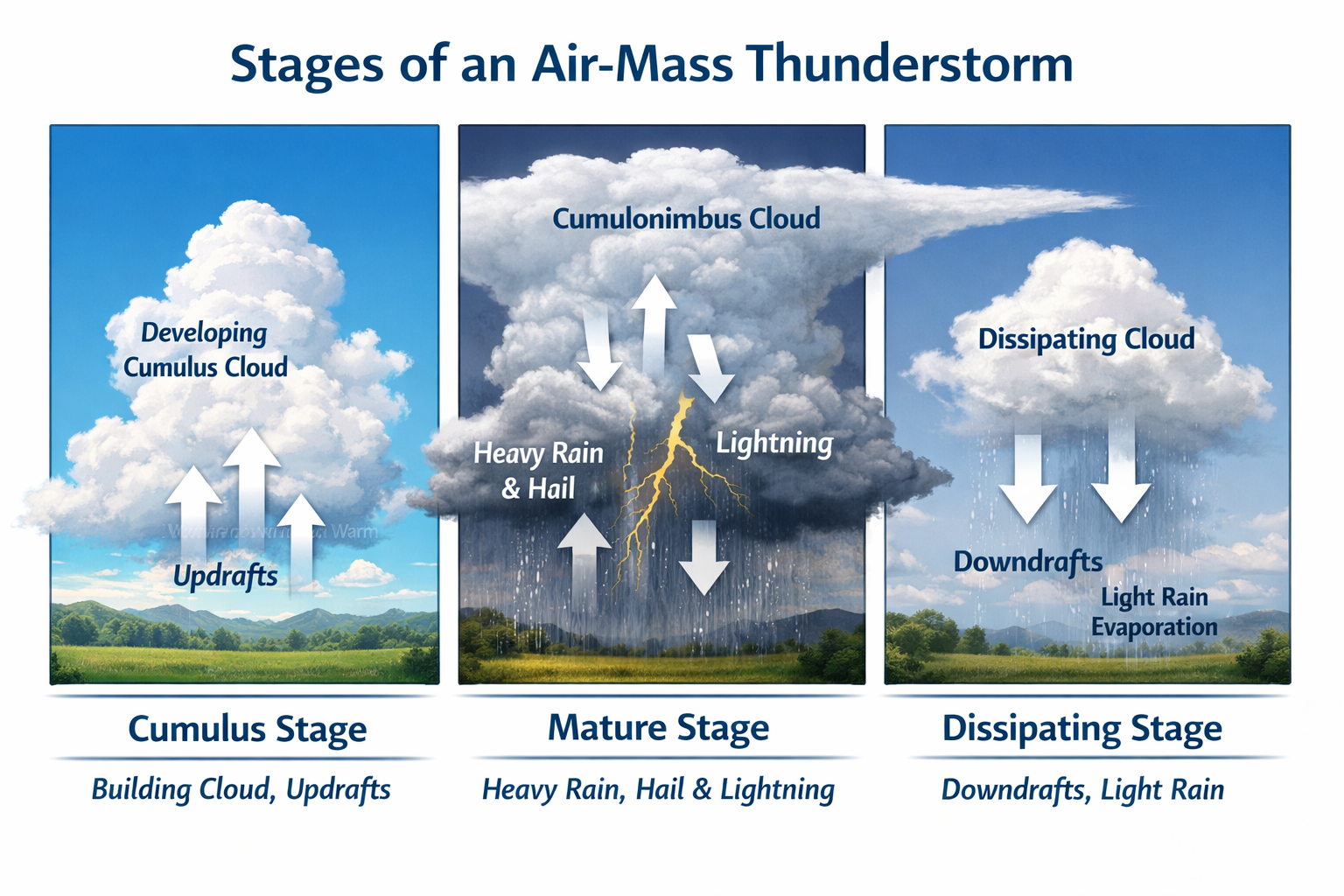
As the thunderstorms will occur during a unstable atmosphere, you could predict that the weather itself can also be a bit unpredictable.
During thunderstorms, you can expect these types of weather:
In VFR flights where we fly inder Visual Flight Rules, pilots must remain direct sight on ground and water. This is dependent on how many visibility we have in the cockpit, as we have to avoid other traffic. In aviation we can use different terms to describe the visibility:
The visibility is not always exactly the same in various directions, due to fog or other phenomenons. This can also be reported in different terms to give the pilots a better understanding to avoid assumptions leading to accidents:
To save a lot of time for airport-associates, most measurements are done automatically by instruments. Runway visibility is measured by transmissometers next to the runway, where the visibility can be seen live within seconds. However, intrepretation of automatic systems must be considered if we want to believe this 100%.
The regulatory visibility for VFR is described in the rules of air space classes. The visibility for VFR that is very important is the slant visual range. This is the line of sight in front of our plane, where we look to the ground. However, when some haze, mist/fog or brume exists, this can decrease drastically.
Mist and brume occurs by colling air without any vertical movement. Mist/fog will be categorized into the origin of cooling:
In clear nights, the surface of the earth will cool down by heat-radiation. The air above will also cool down, sometimes even lower than the dew point. This results in condensed water vapor and this is called radiation mist. This can beup to 1000ft high, but also around 2 meters high. Then it will be called ground fog.
Cooling at a cold surface can happen when warm humid air will flow to an aera with cold underground. This fog will be advected. This mostly happens during winter, after a period with frost ends by a new flow of air with relative warm and humid air. This is the warm mass.
Above the sea, this type of mist is called sea mist.
Merged air can also cause mist
Fog can also occur by evaporation of rain. The rain increases the humidity in cold air and this results in rain-mist.
The dissolving process of mist is exactly the same as with clouds, they can dissolve in three ways:
Mist, Fog and Brume are all terms that sounds like they mean the same, but we consider them partly different:
| Dutch term | English term | Cause | Visibility |
|---|---|---|---|
| Mist | Fog | Water droplets | < 1000 m |
| Nevel | Mist | Water droplets | 1000–5000 m |
| Heiigheid | Haze | Dust particles | < 5000 m |
Fronts are different weather systems that collide with each other. On a location where two different masses (with different temperatures) of air will collide, there will be a transition zone which is called a “front”. A front is often referred to a zone with clouds and precipitation and therefore relevant for aviation. The weather conditions in a front are dependent on the temperature differences between the air masses, where we have some terms for:
Here active fronts will let you know that they are there with lots of rain and maybe thunder where inactive fronts often go by unnoticed.
We can have multiple types of fronts, as illustrated below. The most important types are:
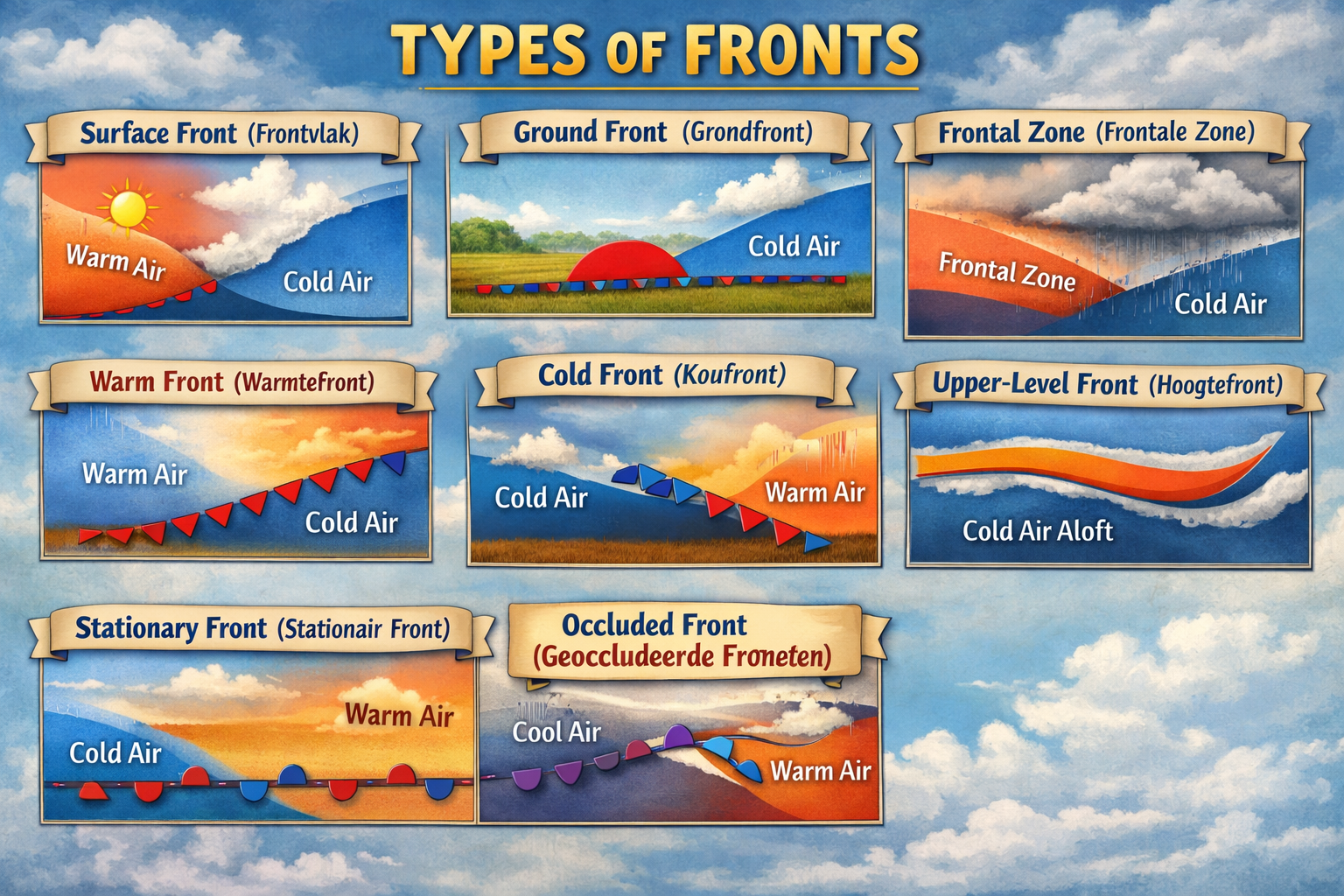
Fronts mostly consists of these components:
On charts, fronts will be indicated as lines with different symbols on them, mostly as seen in the picture above about fronts them selves.
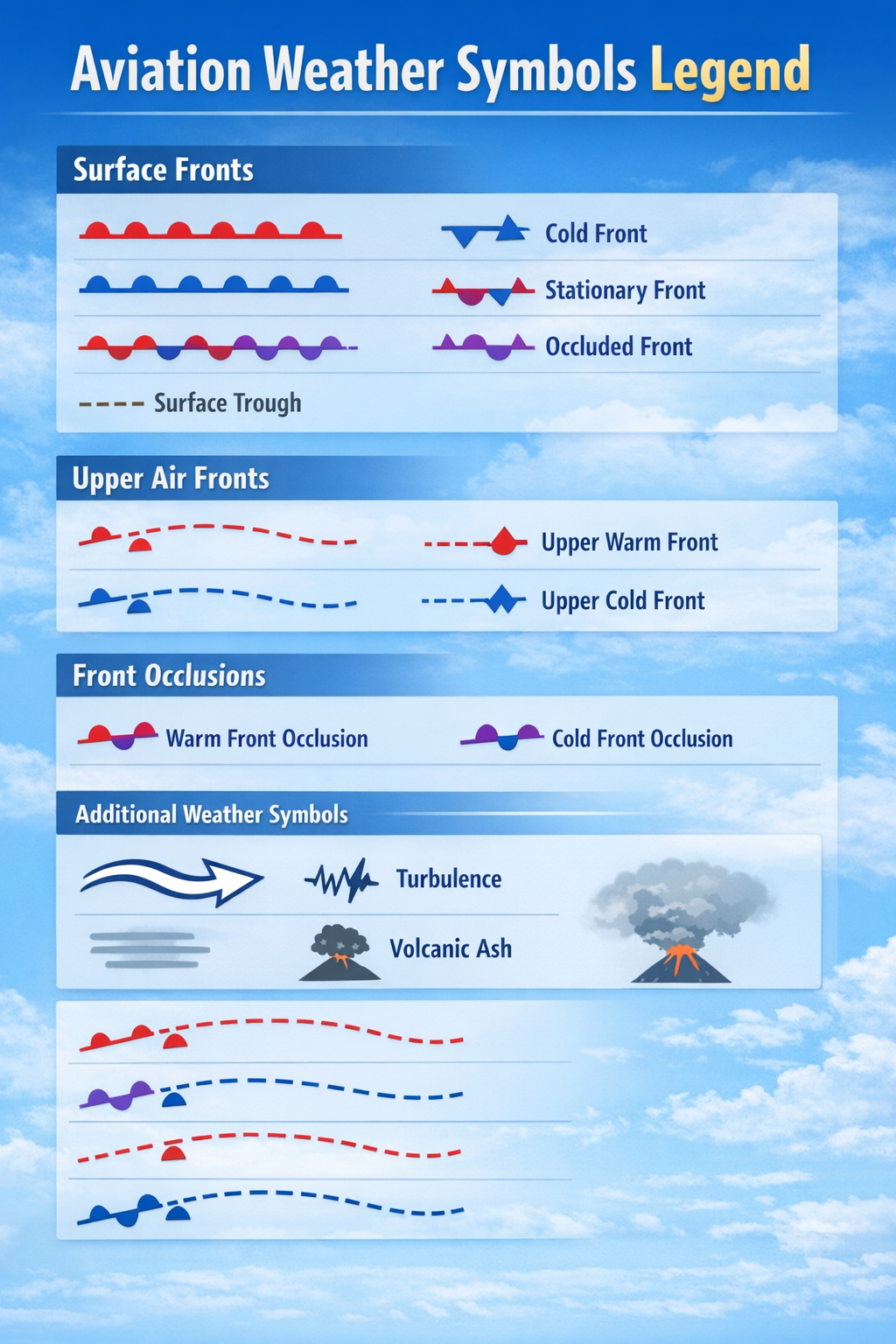
Note: the high level/upper air symbols will not be filled, so the middle should be white.
Warm air is lighter than cold air. The warm air mass will flow above the cold layer. This flowing warm air will merge with the cold air and will pull up the air, till the cold air dissappeared. This merge with the forced rise of warm air causes cooling and condensation and can cause clouds and precipitation.
As the rising movement of warm air to the surface front, this will cause condensation. This is the reason why the whole front contains closed clouds:
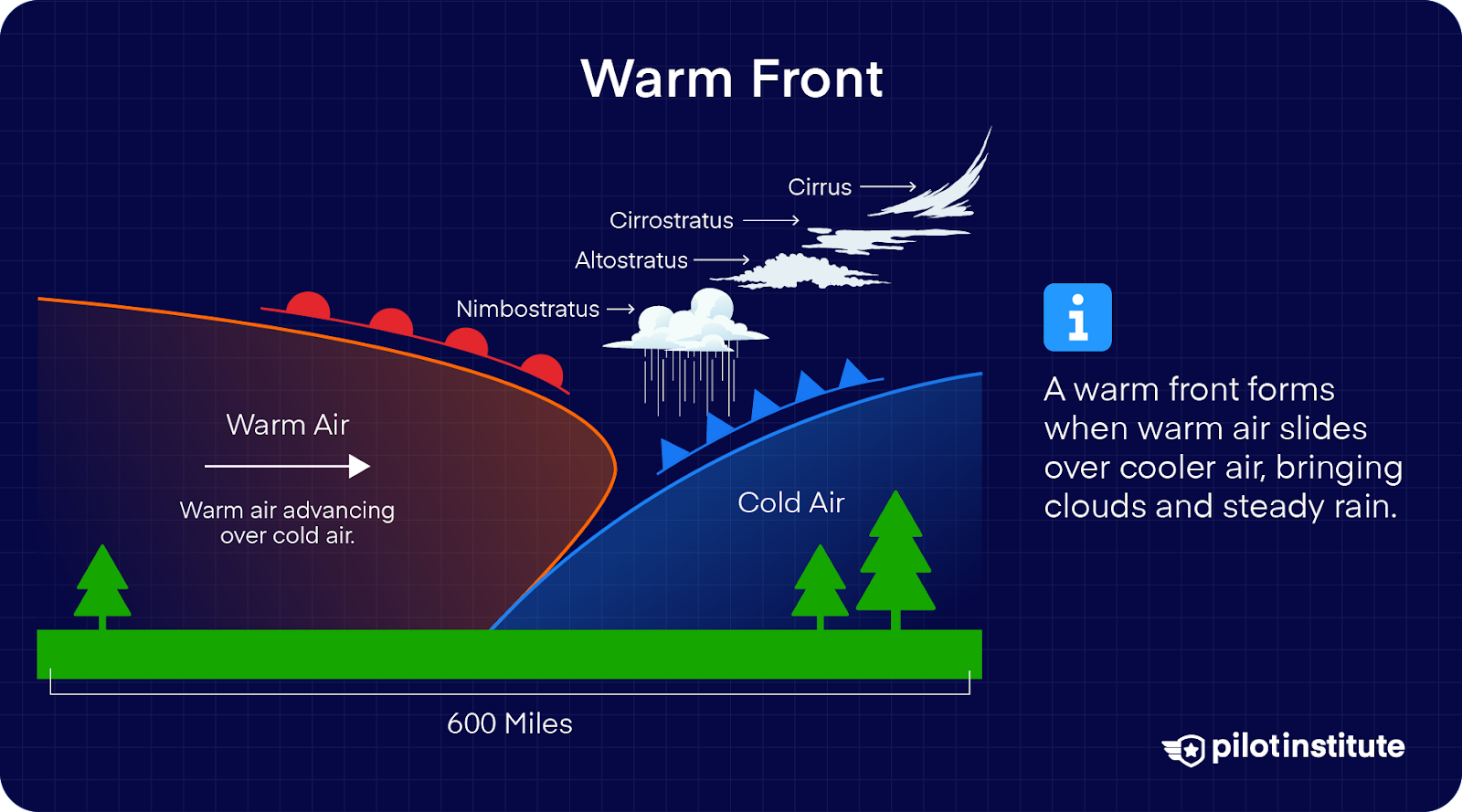
Source: pilotinstitute.com
Details:
Such warm front which is stable is a package of cirrus clouds, followed by cirrostratus, then altostratus and then nimbostratus, containing rain. This can also contain a hidden Cumulonimbus, which we call embedded Cb’s.
If the warm front arrives, you will start seeing some cirrus clouds, then some rain and visibility and air pressure will decrease. The winds will increase.
A warm front is slow and therefore is a period with some days of no VFR flying.
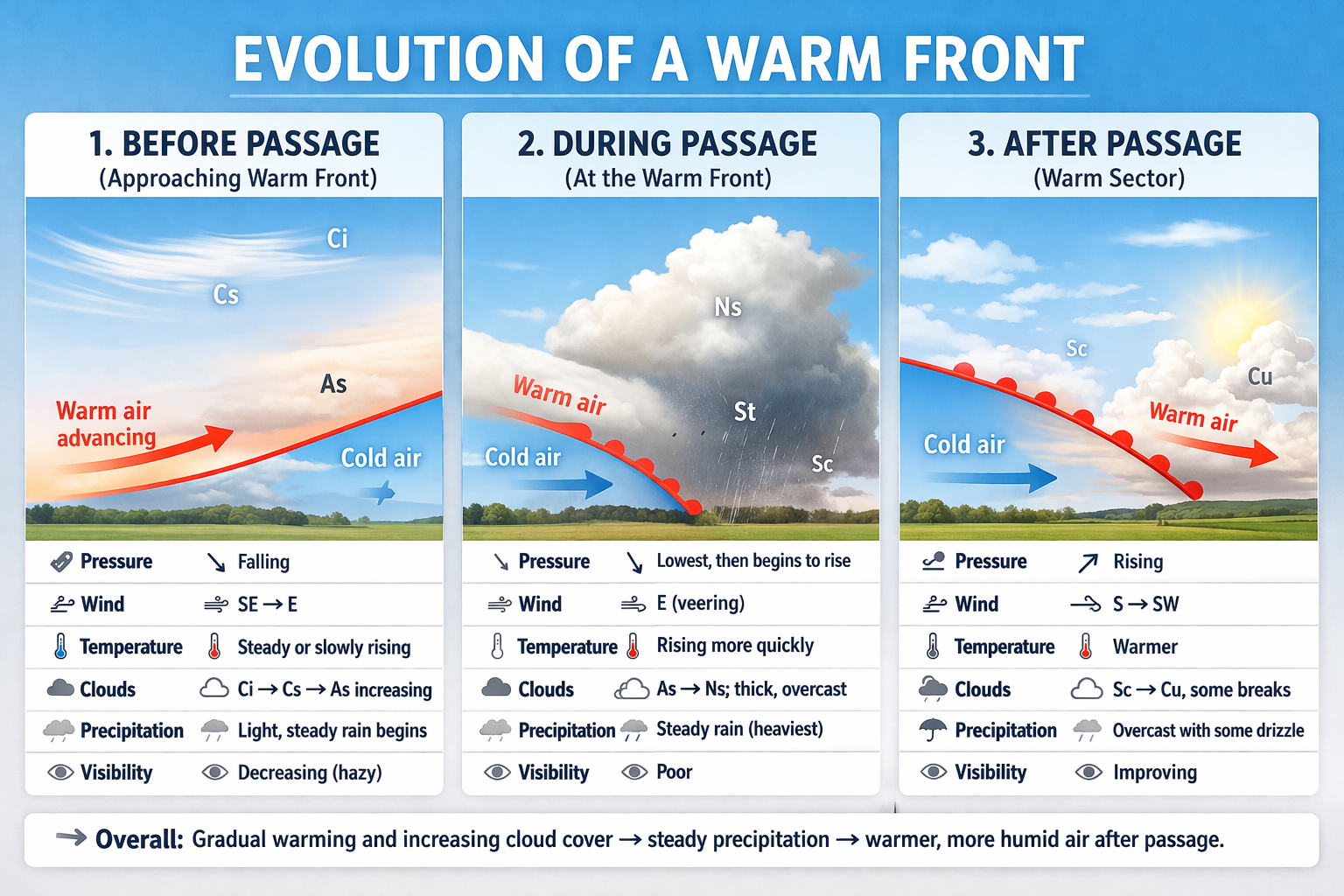
Cold air is more dense and heavier than warm air, which causes cold air to displace warm air first at the ground. Just like the warm front, the cold front will move in the direction of the cold air.
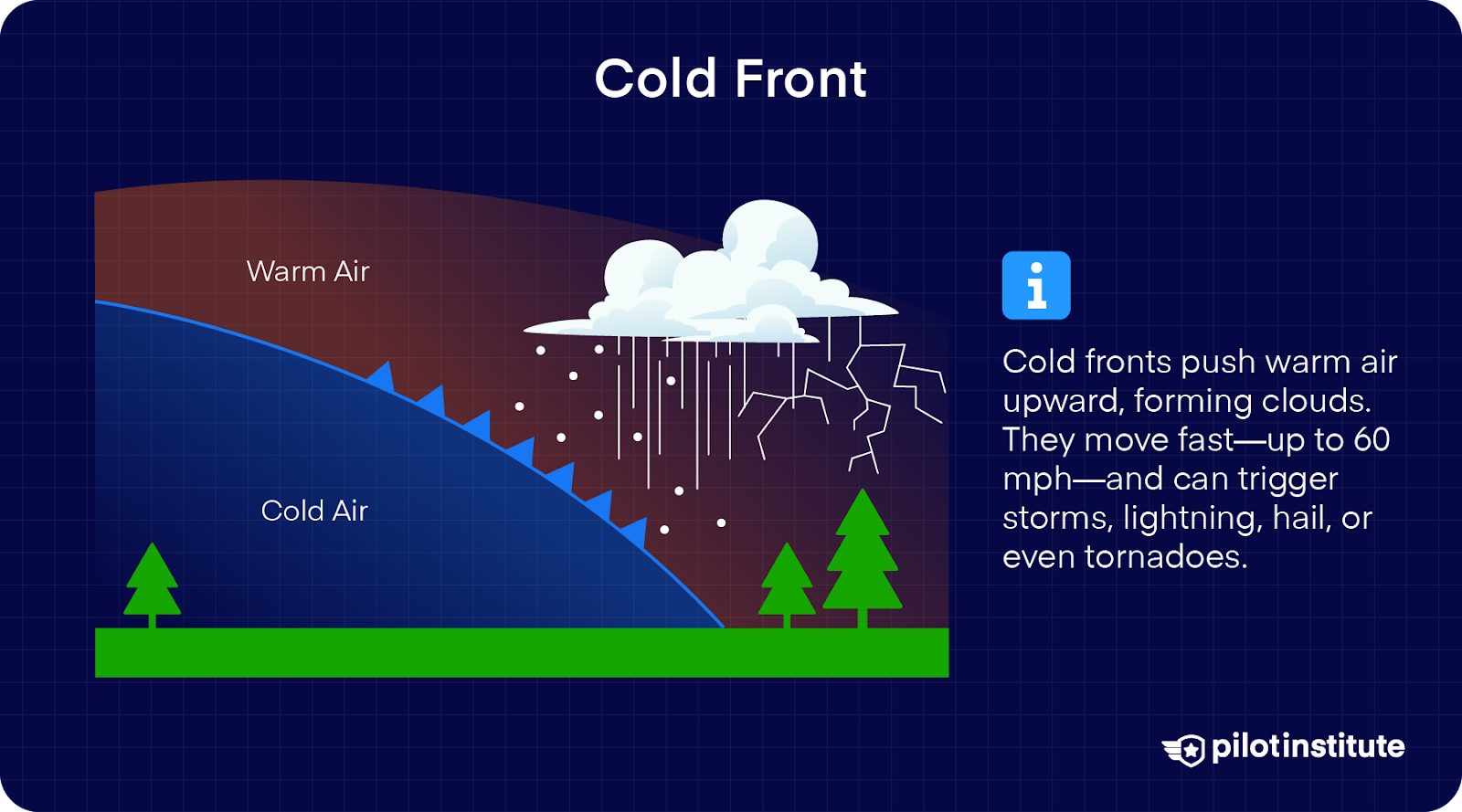
Source: pilotinstitute.com
Details:
The slope of the cold front is much steeper than the warm front. A cold front is also much faster than a warm front, passing by at a higher speed. However, cold fronts can be more dangerous as the warm air causes clouds to rise, causing towering cumulus clouds which can evantually grow into the dangerous cumulonimbus clouds.
A cold front tends to stay at ground level, pushing the warm and moist air up. This creates instability and causes the air to reach its dew point and condensate.
If a cold front arrived, the air pressure will drop, the wind will increase. Then the clouds will increase too.
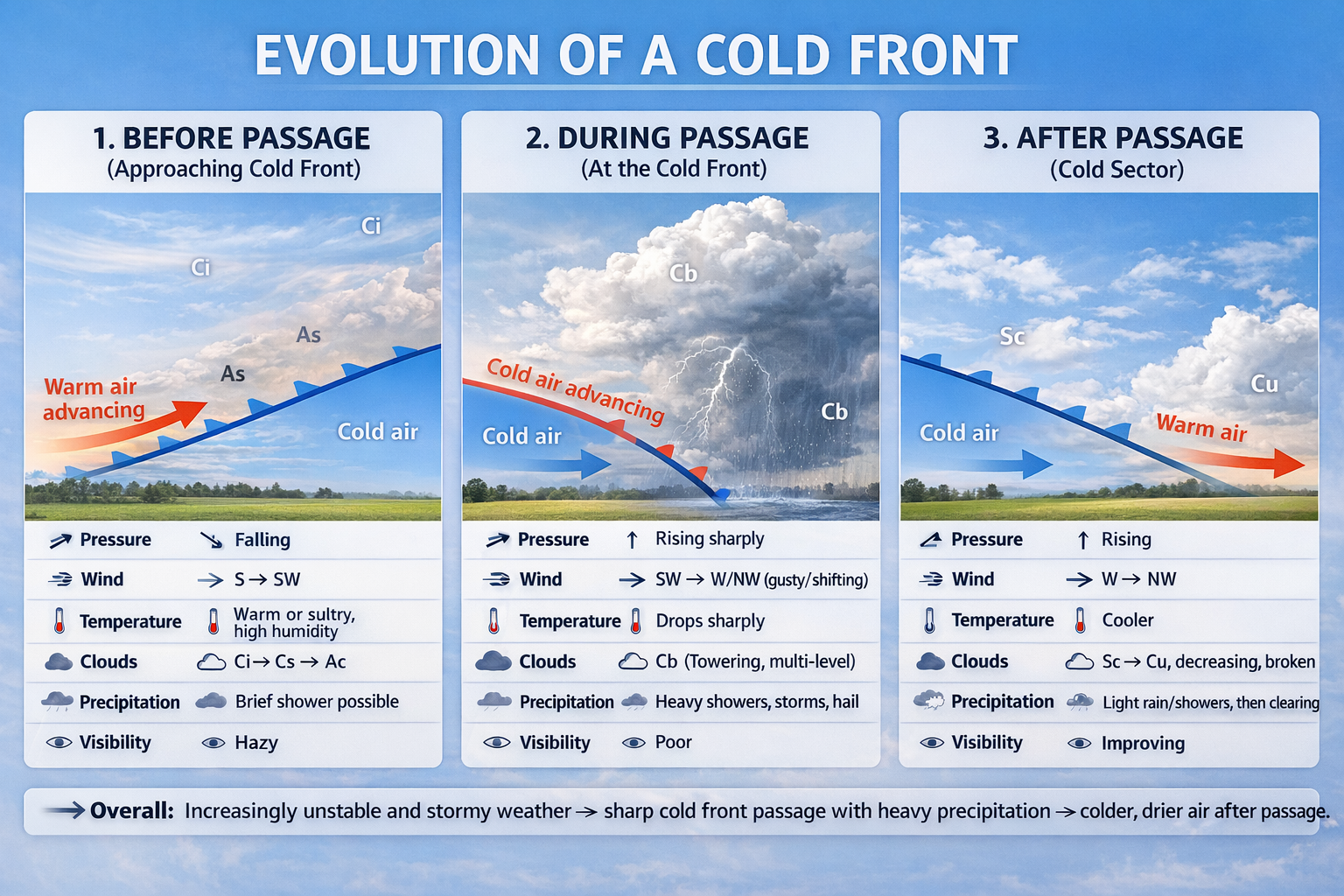
Stationary fronts will stay at a certain position or will move very slowy. Sometimes even slower than 5 knots. There will be no movements, only parralel to the front. This can cause long periods of bad weather, due to the slow speed.
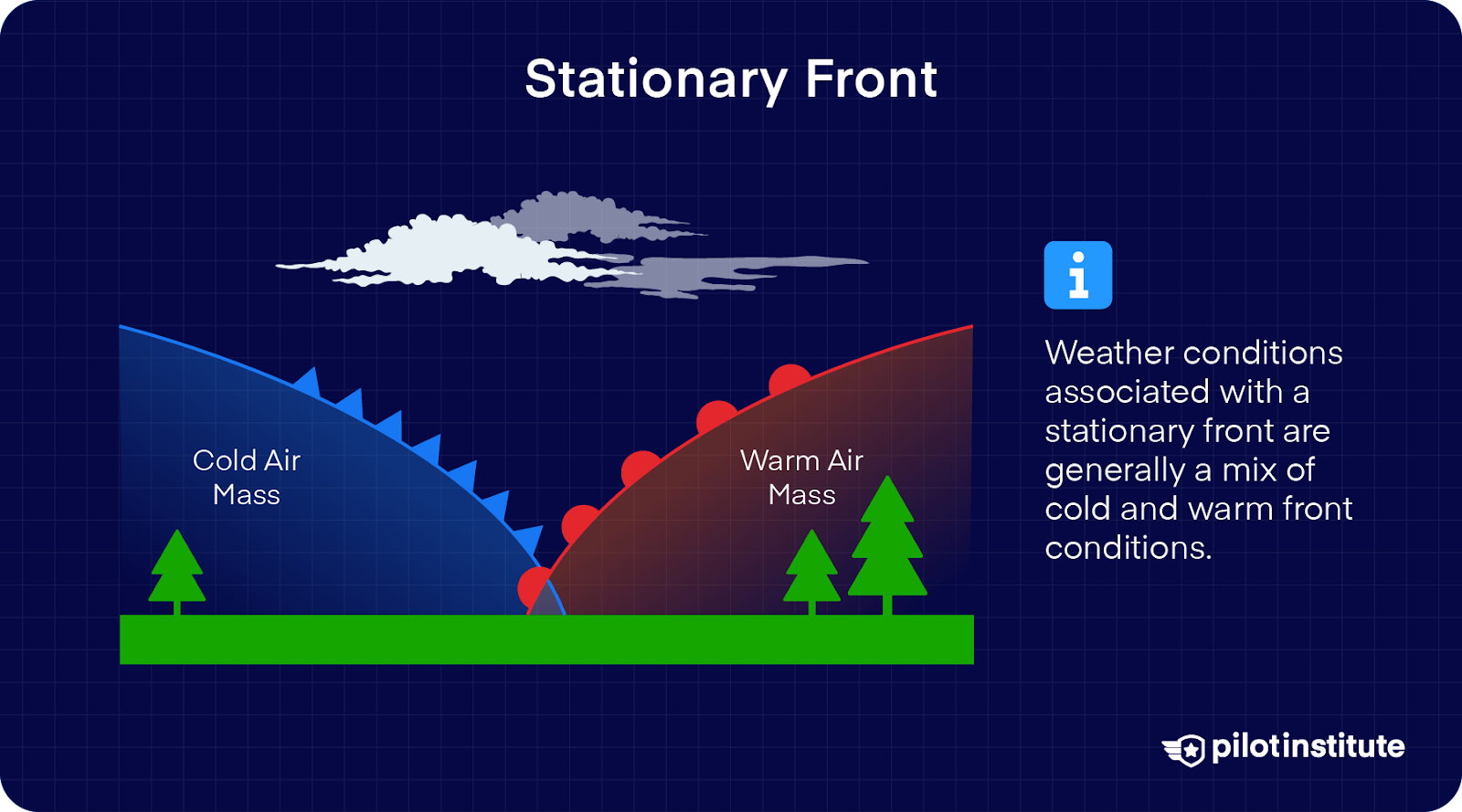
Source: pilotinstitute.com
A stationary front contains weather conditions of both warm and cold fronts and can take up several hours to days.
Winds mostly blow the way the front lies. Not from cold to warm or reverse.
Occluded actually means “hidden”.
Occlusion is where a cold front catches up with a warm front. The warm air is forced to rise off the ground, and the system becomes dominated by cooler air at the surface. This often leads to widespread cloud, steady rain, and sometimes stronger winds near the low-pressure center.
A classic example is a mid-latitude cyclone over northwestern Europe. For instance, when an Atlantic low moves toward the UK or the North Sea, the faster-moving cold front can overtake the warm front. As the occlusion forms, people often experience a long period of thick cloud, persistent rainfall, falling visibility, and a noticeable wind shift.
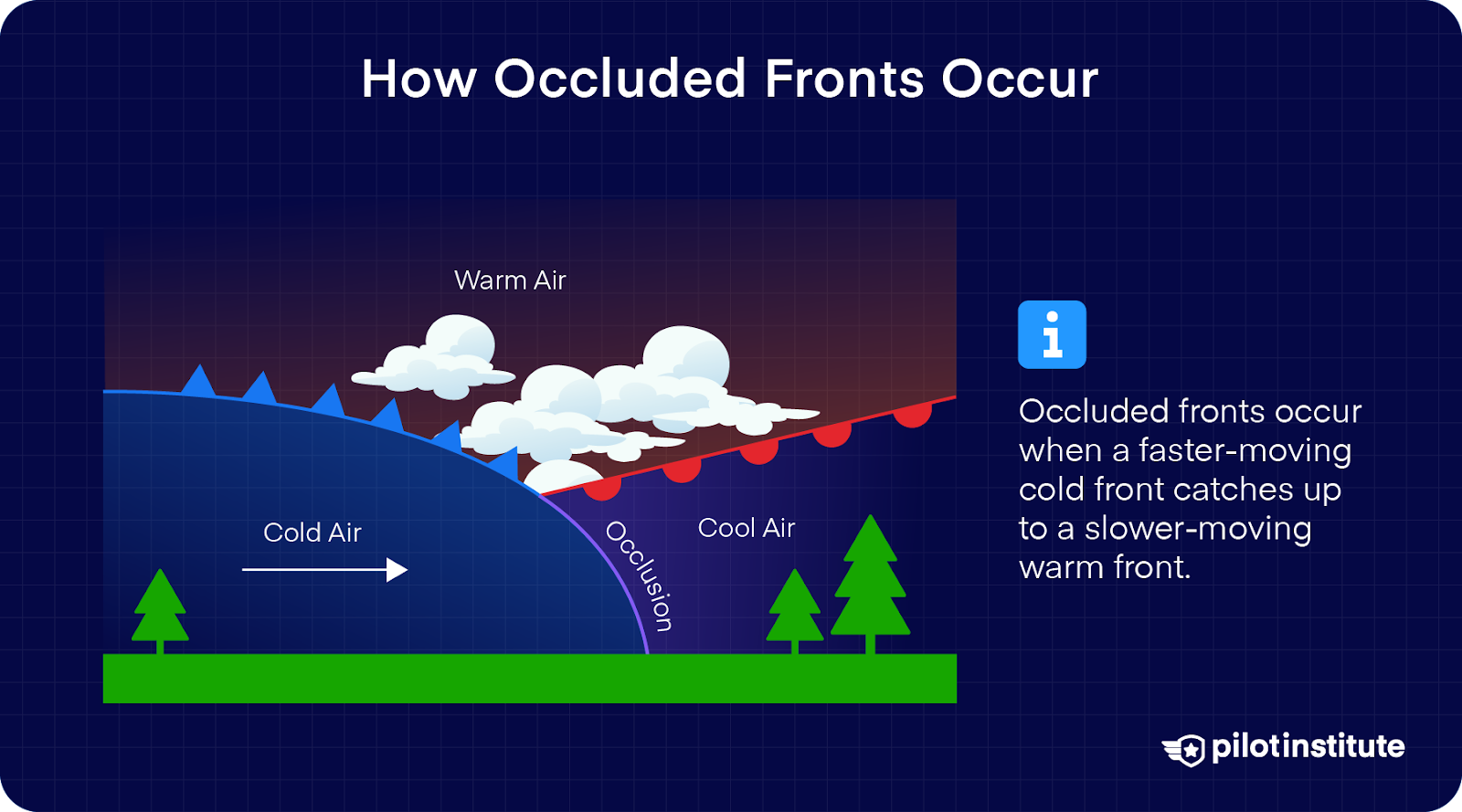
Then we can have cold front cllusions and warm front occlusions:
We speak of a upper air front if the front-surface is only at high levels and not on the ground. This can occur when a front at the ground dissolves and turbulence merging different masses of air. This can also happen in mountain-rich areas.
Weather in Europe will be dependent on two big masses of air, polar air from Greenland and tropical air from the Azores islands and north Africa. The transition layer of these two masses is the polar front, just where West europe is. In the summer, this front can be found at latitude 60 north, where Iceland and Sweden are and in the winter at 50 degrees, the line of Netherlands and England.
A frontal depression forms when cold polar air meets warmer air along the polar front. A disturbance creates a wave in the front, causing surface pressure to fall and a low-pressure area to develop. The system then forms a warm front and a cold front. Warm air is forced to rise over cold air, producing clouds, precipitation, and wind. As the depression intensifies, the cold front eventually catches the warm front, forming an occlusion, after which the system usually weakens.
The weather we can expect in a frontal depression is a warm front followed by a cold front.
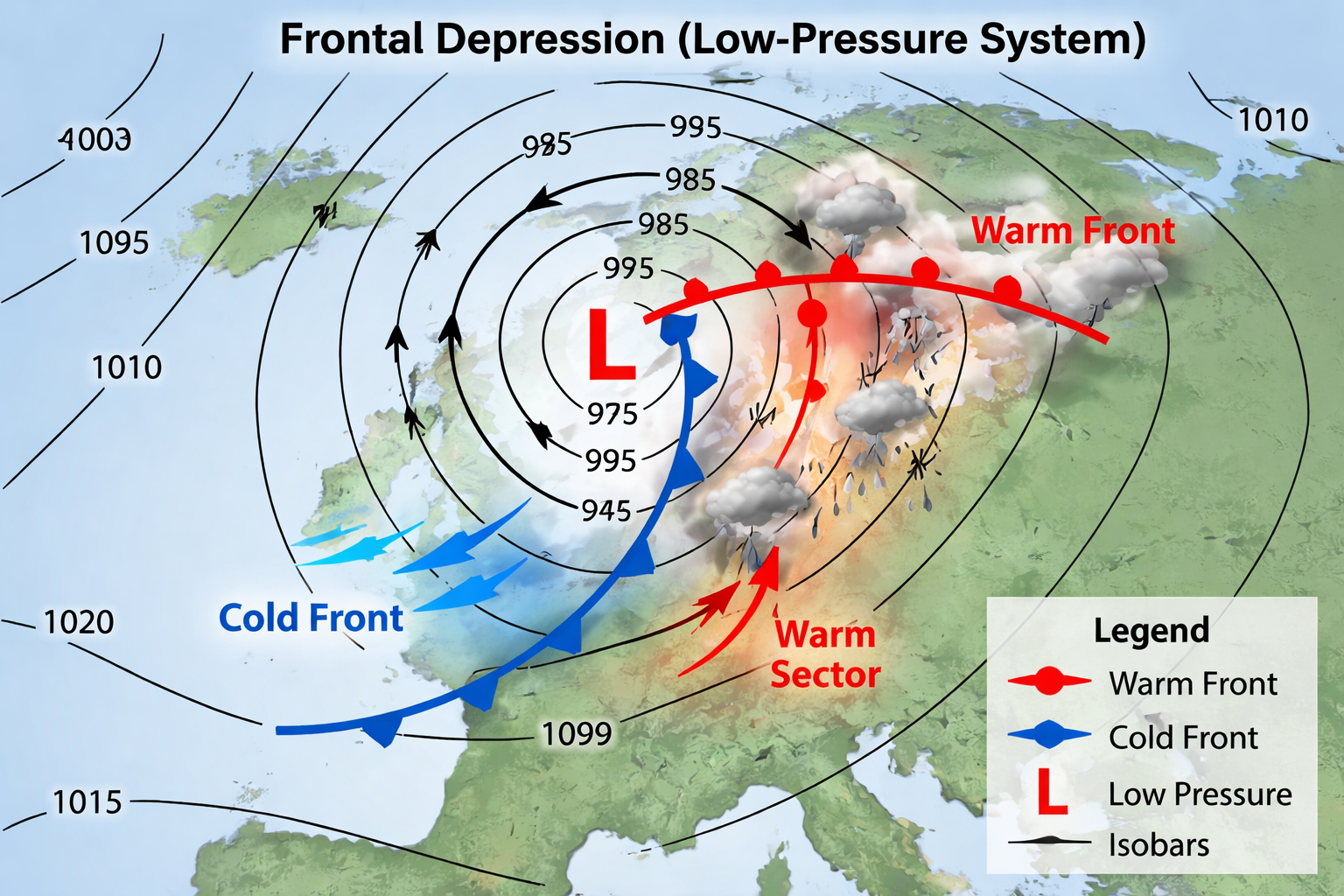
A thermal depression is a low-pressure area caused mainly by strong surface heating. When the ground heats up quickly, the air above it warms, expands, and rises. This creates lower pressure at the surface and can draw in surrounding air.
A common example is a heat low over a hot desert or inland plateau during summer. In the afternoon, intense sunshine heats the land strongly, the air rises, and a shallow low-pressure area forms. This can help trigger local winds, dust lifting, or thunderstorms if enough moisture is present.
Ice build-up can happen on the ground and during flight. Ice on the plane is a huge risk for aircraft, as this causes the following problems:
Let’s take a look at what weather conditions this can happen.
Ice build-up will happen if the temperature is under 0 degrees, and the air contains enough undercooled water. The most chance on undercooled water is between 0 and minus 12 degrees celcius. Mostly, ice build up will happen when precipitation, coulds, brume, fog or mist is in the air or flying into.
The outside temperature of the plane material can also be 0 degrees celcius or lower, causing any moist to freeze on contact. Especially when going from cold air into warmer and humid air.
The types of ice build up are:
When in a front precipitation from warm air comes into the cold air, this will then be undercooled water. This frontal investion will cause a ice triangle. In this ice triangle, undercooled water will fall in the form of freezing rain or drizzle which causes a lot of ice build up.
Because of the small slope of the front surface, the warm front is bigger than a cold front.
In the carburetor, fuel is mixed with air si the engine always have a optimal mix of both. The engine will suck outside air into a narrow space, called a venturi and then in the carburetor. In this narrow space, there will be a lower air pressure (Bernoulli’s law) and the sprinkler will get fuel, which is combined into brume with the air.
The combination of the air pressure decrease and evaporating fuel, the themperature in the carburetor will decrease with temperatures up to 40 degrees celcius. This cooling can condense the water from the air, and can evantually lead to a solid freeze. This causes the engine to run inconsistent or even turn off, which we don’t want in flight.
The most chance of carburetor ice is in these conditions:
Always turn on the carburetor heat (CVV) in conditions where you have a lower RPM, sometimes in cruise, but this leads to a drop in RPM.
Before we are going to lift of in our beautiful aircraft, we must first as part of our flight preparation, look at the weather in our area. The weather can often be predicted pretty well, but in some circumstances this can be very unpredictable.
We can use the following sources to get a good understanding of the weather during the flight:
| Weather product | Description | Published by | Frequency | Where to find |
|---|---|---|---|---|
| Synoptic Weather Charts | Broad overview of the weather over Western Europe, including fronts and pressure systems | Dutch KNMI | Several times per day at standard synoptic times. (KNMI) | KNMI Weather Charts |
| Significant Weather Charts (SIGWX / SWC) | Show significant en-route weather such as turbulence, CB, jet streams, volcanic ash, and tropical cyclones | World Area Forecast Centres (WAFC) in London and Washington | 4 times per day | Met Office WAFC |
| Graphic Low Level Forecast Chart (GLLFC) | Winds and temperature up to FL100 | Dutch aviation weather services | 3:00, 9:00 and 15:00 UTC | Luchtvaartmeteo |
| METAR (Aerodrome Routine Meteorological Report) | A report of the actual observed weather at an aerodrome, including wind, visibility, cloud, temperature, and pressure. | The local controlled aerodrome | Every 30 minutes | Aviation Weather Center – METAR/TAF |
| ATIS (Automatic Terminal Information Service) | A continuous aerodrome information broadcast that often includes the latest weather information used operationally by pilots. | The local controlled aerodrome | Every 30 minutes | Aerodrome VHF frequency |
| SPECI (Special Meteorological Report) | Unscheduled report issued between METARs when significant changes | The local controlled aerodrome | When significant weather occurs | Aviation Weather Center – METAR/TAF |
| TAF (Terminal Aerodrome Forecast) | A forecast for 24 to 30 hours in future of the predicted weather | The local controlled aerodrome | Every 6 hours | Aviation Weather Center – METAR/TAF |
| General Aviation Weather Bulletins | In the Netherlands, KNMI publishes a general aviation weather bulletin for flight preparation and short-term forecasting | Dutch KNMI | Every 3 hours. (KNMI) | KNMI GA Weather Bulletin |
| GAFOR (General Aviation Forecast) | A route/area forecast product for general aviation, published in some countries such as Germany | National weather station | Every 6 hours | DWD Aviation Weather |
| VOLMET (Meteorological Information for Aircraft in Flight) | A service providing meteorological information for aircraft in flight, usually by radio broadcast or datalink | Flight Information Region | Continuous | No single universal public page; accessed via VHF/HF VOLMET frequencies and operational flight documents. |
| Weather Radar | Weather radar is used to detect precipitation and monitor showers, rain, and thunderstorms in near real time (6GHz antenna’s) | Dutch KNMI | Continuous | Buienradar |
| Satellite Images | Meteosat satellite images provide an actual overview of weather systems over Europe, including visible (VIS) and infrared (IR) imagery | European Meteosat | Near real time, updated continuously depending on the imagery product. (KNMI) | /headingLuchtvaartmeteo / EUMETView |
Significant Weather Charts are published by the World Area Forecast Center in London or Washington and contain charts with detailed information. This information is encoded with different icons and have their own meaning.
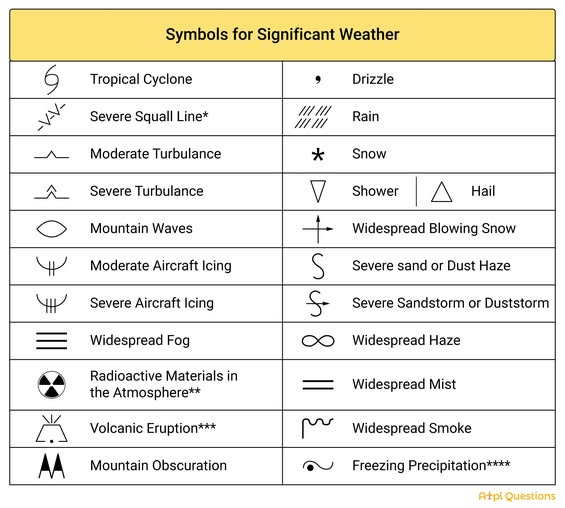
Significant weather charts are meant for a great overview-forecast, especially when planning international flights. These show the flight levels FL100 to FL450
The graphic low level forecast (GLLFC) is a combinaton of the low level significant weather chart for a Flight Information Region and winds/temperatures from ground to FL100.
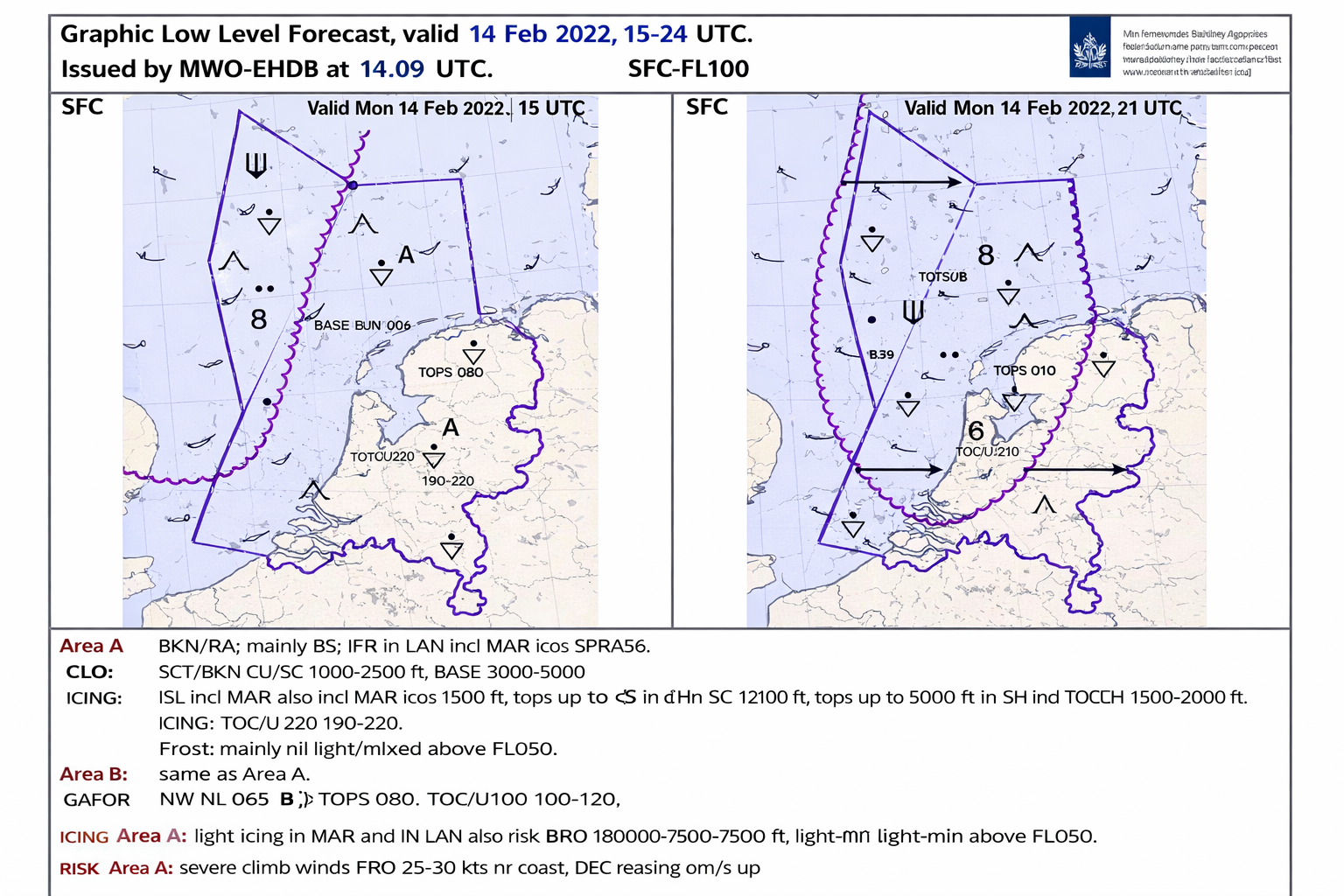
All the flags are windbarbs which show the wind direction and speed. It does it in this way:
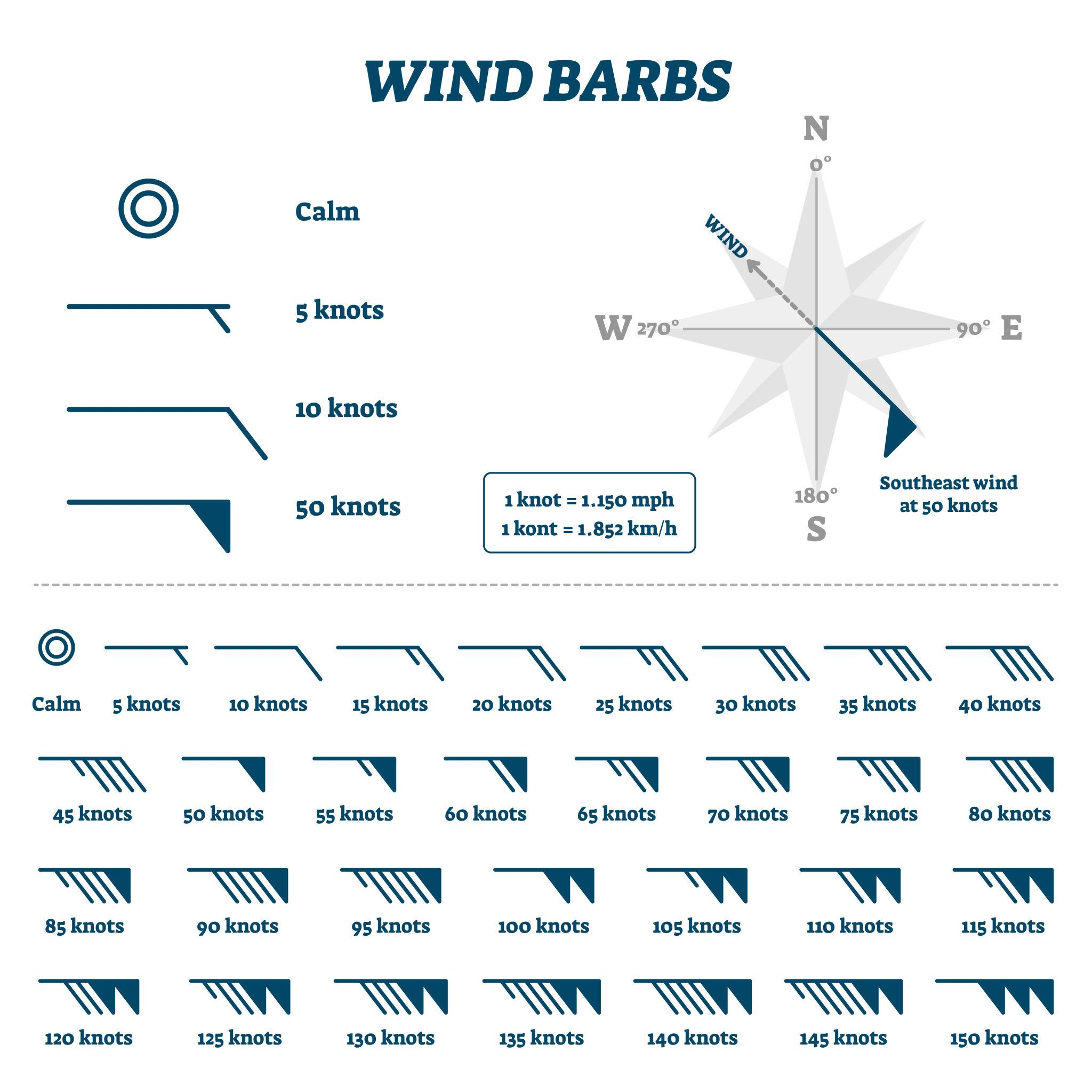
The max is three of the same filled symbol, with winds above 150 knots you should ask yourself if you even want to be outside.You can see this as a weather station with a banner, it always points to the direction of wind source.
There are some other abbreviations used in this type of charts:
On controlled airfields, for the full 24 hours on a day there will be done measurements of the actual weather and published every 30 minutes. This looks like a code to new people, but still resides from older ACARS and teletext solutions used in the past.
METAR EHAM 211125Z 05009KT 020V080 9999 FEW008 07/04 Q1019 NOSIG
This actually means this:
That states a lot more; meaning a cold spring day with this weather:

Source: AMS Live on Youtube
CAVOK means “Ceiling and Visibilty OK” and is only mentioned by ATIS/METARs if the following criteria are all met:
If one of the above criteria are not met, NSW or NSC will be used:
In America we have another option: CLR
If the METAR contains any slahes ////, then the information is not measured, giving no 100% warranty on the information:
METAR EHAM 211125Z ////KT 020V080 9999 BKN008/// 07/04 Q1019 NOSIG
Here the wind and type of clouds is unknown, meaning that any cumulonimbus could be hiding.
METAR is actual measured weather with a trend and TAF is a forecast for the coming 24-30 hours. When departing from a controlled airfield, you are required to listen to the ATIS containing this METAR information which will be coded with a increasing letter (like Delta). When asking for the flight clearance, you have to pass on this letter as acknowledgement that you have listened the ATIS. When a new METAR is released in the meanwhile, you need to monitor the ATIS again.
A SPECI is actually a intermediate METAR, published if any significant change was measured. On military fields, this color code is being used.
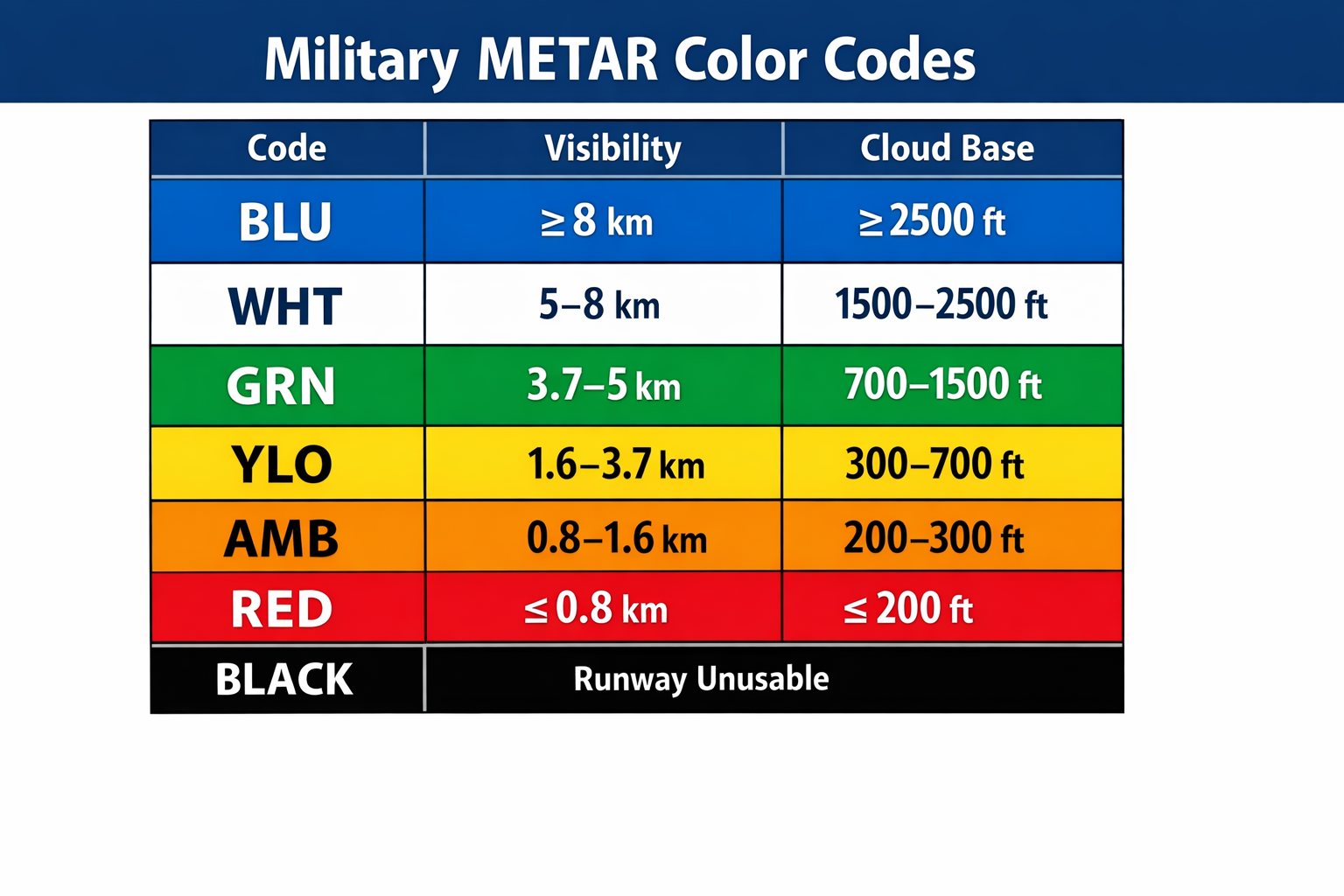
An airport with weather station also has something called a Terminal Aerodrome Forecast. This is a text-based forecast of the weather in reach (5 nautical mile range) of the airport in de coming 30 hours. We use this to plan flights more that 6 hours ahead. A metar is only valid for 30 minutes.
A VOLMET is weather information for planes en-route. This is broadcasted on VHF frequencies which you can listen out, and are totally meant for international commercial traffic. “En vol” in French means for flight, this is the source of this name.
The VOLMET is really like an ATIS but then on route and an example is this:
“Amsterdam VOLMET weather at 1125 UTC on the 21st. Wind 050 degrees at 9 knots, varying between 020 and 080 degrees. Visibility 10 kilometres or more. Few clouds at 800 feet. Temperature 7, dew point 4. QNH 1019. No significant change expected.”
Aside from the given sources of weather information, two separate messages can be published:
In simple terms:
These messages can be received from your preparation, ATC or flight information services or your VFR navigation app like SkyDemon.
We also have weather radars, both on the ground and installed on some planes. Weather radars will send radio frequencies in the 6GHz band into the air, and can detect any reflections. This 6GHz band can receive precipitation elements pretty good and therefore can make a good forecast of the weather ahead. It basically sends a radio pulse into the air, and those precipitation elements like rain and snow reflects it back.
Sometimes, this causes clutter, which are false positives received by other devices or buildings on the ground but will be filtered for the greatest part.
A weather radar as a reach of around 200 to 250km, which makes it possible for the KNMI residing in de Bilt to scan the whole country and great parts around it.
Thunderstorms can also be detected as they are being measured using a different set of electromagnetic radiation detectors.
We can also use satallite images from the Europen Metrosat satellite. This satellite makes pictures every 15 minutes in two different types:
These can be used to cross check to view which type of clouds are present and which protions are visible.
Visible light images give a great overview of the clouds. Thick clouds are lighter than thin clouds, but no difference can be seen within low and high clouds.
Infrared images will show the temperature of the clouds, where warm surfaces are darker and cold surfaces are lighter. Low clouds therefore are grey and high clouds are white.
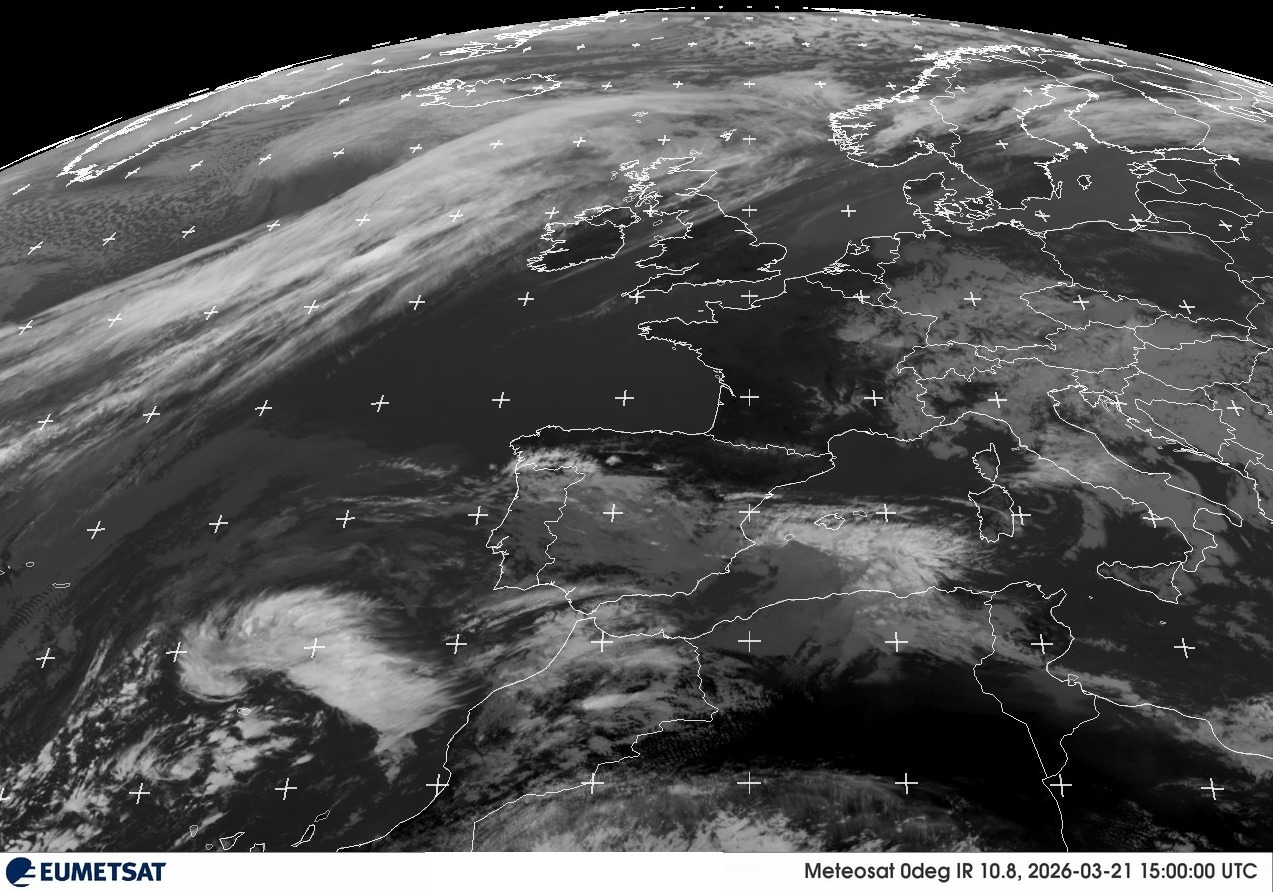
Left: Infrared Right: Visible light
Thunderstorms are not visible on these satellite images because they look like high clouds. Satelitte images can only detect the highest point of the clouds, so we can use them but this is not our primary source.
To use satellite images, visit this website: https://eumetview.eumetsat.int/static-images/latestImages.html
In some countries, we have the GAFOR, called the general aviation forecast. This is a code which is valid for 6 hours, looking like a METAR but has some different coding:
GAFOR: Route A – X-RAY Validity: 21 March 2026, 1200–1500 UTC Weather: Broken cloud layers, local rain showers, moderate visibility reduction in precipitation Cloud base: 1,500–2,000 ft AGL Visibility: 5–8 km, locally 3 km in showers Wind: 220/15 kt, gusting 25 kt over higher terrain Freezing level: 6,000 ft Turbulence: Light to moderate below 4,000 ft Icing: Nil below freezing level
The types/codes are given:
O – Open: Conditions are suitable for VFR along the route D – Difficult: VFR is possible, but conditions are difficult M – Marginal: Conditions are marginal for VFR X – Closed: The route is closed for VFR due to weather conditions
In the Netherlands, you can use the Weather Bulletin for General Aviation from the KNMI which gives a better understanding but bigger countries work with the GAFOR, mostly bigger countries.
That was it for Meteorology.
You have reached the end of the page. You can navigate through other blog posts as well, share this post on X, LinkedIn and Reddit or return to the blog posts collection page. Thank you for visiting this post.
If you think something is wrong with this post or you want to know more, you can send me a message to one of my social profiles at: https://justinverstijnen.nl/about/
If you find this page and blog very useful and you want to leave a donation, you can use the button below to buy me a beer. Hosting and maintaining a website takes a lot of time and money. Thank you in advance and cheers :)
The terms and conditions apply to this post.
For a live overview of my flight lessons, visit: https://flighttools.justinverstijnen.nl/flightlessontracker
This page can contain a collection of personal notes, steps to remember, finished and unfinished content. Please excuse brevity.
Do not use specific information given like fuel flow, landing/take-off distances for your flights. Always refer to the POH of your exact plane for flight preparation. My information is just for references that I used.
In aviation, we are mostly in environments of low air pressure. As we go further up in the air, the pressure goes down. This will have some effects on humans, where we could have hypoxia and barotrauma.
Hyperventilation and carbon dioxide-poisoning will play together with breathing and the effect on blood gasses. We will take a look into them all.
In the Troposphere (0-36.000ft), we have an air mass that consists of the following components:
| Gasses | Symbol | Concentration |
| Nitrogen (Stikstof) | N₂ | 78,1% |
| Oxygen (Zuurstof) | O₂ | 21,0% |
| Several noble gasses (edelgassen) | Not applicable | < 0,1% |
| Water vapor | H₂O | 0,1 - 1% |
As we already discussed this topic thoroughly in Meteorology, please take a look at there if you want to know more about air pressure: https://justinverstijnen.nl/ppl-theory-met/#air-pressure
Organs and vessels in your body need energy to function properly. This energy will be generated by burning nutrients (voedingsstoffen). The process of burning nutrients is called oxidation. In this process, oxygen is used and as a result carbon dioxide which we breathe out. So the goal of breathing is to get energy.
Breathing conists of 3 phases which are in a never-ending circle:
The functions of why we breathe are:
Because we need to actually be able to inhale and exhale air, the oxygen pressure in the lungs is lower than in the atmosphere. This is because breathing requires air to move in and out of the lungs. For that airflow to happen, the oxygen pressure inside the lungs must be lower than in the atmosphere.
The most important factor of breathing regulation is the carbon dioxide pressure in the blood.
Ventilation is the process where due to the movements of the breast carcass air is transported from and to the lungs. The capacity of a adult is around 6 litres. The vital capacity, usable capacity and actually filled part is around 4,5 litres.
When breathing, the lungs fill up with air and the air will go through the small bronchi and bronchioles in the lungbladders. These lungbladders are called the Aleovi.
The alveoli is responsable for the transport of gasses. Oxygen and other gasses in the air will go through the thin wall between lung bladders and blood. Simultaneously, carbon dioxide will flow through the blood back into the lung bladders, which is actually the external respiration. The blood rich of oxygen is then pumped from the lungs to the heart and other organs through the body.
The frequency and depth of breathing is primarily controlled by the carbon dioxide concentration in the blood.
Oxygen in blood will be transported by a special transport-protein called hemoglobin (Hemoglobine). This is a ron-containing protein which is located in the red bloodcells. This stuff is the cause of the red color blood has.
In the exchange of gasses in the alveoli, the hemoglobin will be almost fully (97%) saturated with oxygen. This oxygen-rich blood will be pumped through the body and body tissues. In the meanwhile, the body tissues will give back the carbon dioxide back to the blood. This is a description of the internal respiration.
When hemoglobin absorbs oxygen-molecules, the color will change:
In cases where a person has less oxygen than needed, the skin will color blue. This process is called cyanosis (cyanose). This will be visible at the fingers or lips first.
The link between oxygen and hemoglobin depends on the amount of available oxygen in the alveoli. The higher the O₂ pressure, the higher the concentration of oxygen in the hemoglobin. This link can be seen in the graphic below:
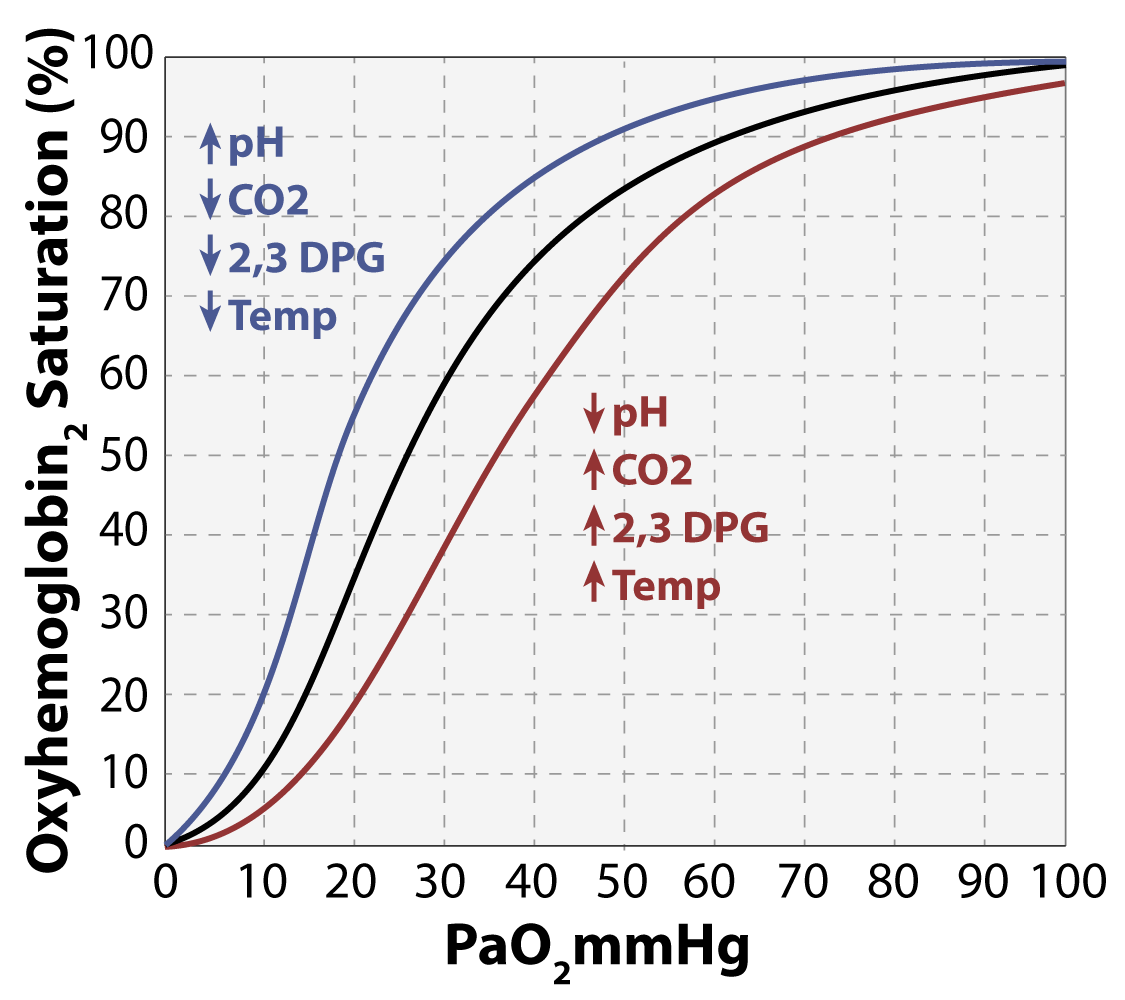
If you increase your flying altitude, the oxygen pressure will decrease. This will go slowly in the beginning of the graphic, but from around 70%, this will go very fast at the steep side of the curve. The curve can result in very fast change of symptoms.
Hypoxia is a condition where a body gets too less oxygen. When exposed for the first time to an environment with low concentration of oxygen, you will not really feel a difference, because oxygen saved in the blood and body tissues can be used for a few minutes. After the oxygen supply is depleted, you will start feeling some really big differences:
The chance of getting hypoxia is different for every person, but some critera:
Because of night visuals are affected first, the maximum altitude without supplemental oxygen is 5.000ft instead of 10.000ft in daylight.
Fun fact: Hypo is a definition of: “Too less”, xy is a shortened version of Oxygen.
| Altitude (feet)* | Altitude (meters)* | Hypoxia Risk |
|---|---|---|
| 5.000 ft | 1.500 m | Night vision begins to deteriorate |
| 8.000 ft | 2.400 m | Mild hypoxia possible (especially sensitive individuals) |
| 10.000 ft | 3.000 m | Noticeable performance impairment |
| 12,000 ft | 3.700 m | Clear hypoxia symptoms likely |
| 14.000 ft | 4.300 m | Oxygen required (many regulations) |
| 18.000 ft | 5.500 m | Severe hypoxia without supplemental oxygen |
*Based on the pressure altitude
A rule of thumb is to remember the 5.000ft at night and 10.000ft at day as lines to not cross without forms of oxygen. Above 10.000 feet, you must have supplemental oxygen for everyone on board for 30 minutes or longer. From 13.000 feet and above, supplemental oxygen is mandatory.
There are some other, way less occurring causes of hypoxia:
Carbon monoxide is a highly poisonous gas without color or smell which arises when hydrocarbons not fully burn. Types of hydrocarbons (koolwaterstoffen) are:
Carbon monoxide is highly poisonous because it wants to merge with hemoglobin. This affinity is around 200 times stronger than the affinity with oxygen. You’ll get the idea. Because of this a small percentage is needed to disrupt the flow of oxygen and unconciousness comes within minutes.
Exhaust gasses contain a small percentage of carbon monoxide. In planes and helicopters with a leak in the exhaust-system can also leak carbon monoxide. This can also leak through the cabin heating system to the cabin itself.
The following symptoms will happen when being in a carbon monoxide poisining:
And every second exposed to carbon monoxide, these symptoms will increase till you die. If exposed to air with 0,1% of carbon monoxide, you could die just within 30 minutes when doing nothing.
This is why we pilots have CO/carbon monoxide detectors on board:
This is a passive detector, which only colors. If feeling one of the symphoms, look at the dot. If its dark, then open the windows and land as soon as possible. There are also active detectors available just like in your home.
When having symptoms or an alert that goes off, do these things:
By breathing fresh air, the elimination of carbon monoxide from the body can speed up.
Hyperventilation is usually caused by stress or anxiety, leading to excessive breathing that lowers carbon dioxide (koolzuurgas/koolstofdioxide) levels in the blood, which then produces the characteristic symptoms:
To solve an ongoing hyperventilation, let the person breathe into a small waste bag. This will breathe in some carbon dioxide (CO₂), and will increase the CO₂, which solves the symptoms.
Hyperventilations can also happen fysiologic when fitnessing or working out. The human body will then on purpose have less O₂ in its blood and will increase the breathing rate to compensate for it. This is normal behaviour.
In the human body, there are some cavities which are filled by air or gasses. With an increase of altitude, this atmospheric pressure will increase and those gasses will expand.
Complaints caused by expansion of those gasses can occur in several organs like the middle ear, paranasal sinus (neusbijholtes), the gastrointestinal tract (maagdarmkanaal) and teeth. Symptoms can be feeling little to severe pain.
The middle ear is linked up by the eustachian tube (buis van Eustachius) with the nasopharynx (neuskeelholte). This helps having the air pressure on the eardrum equal.
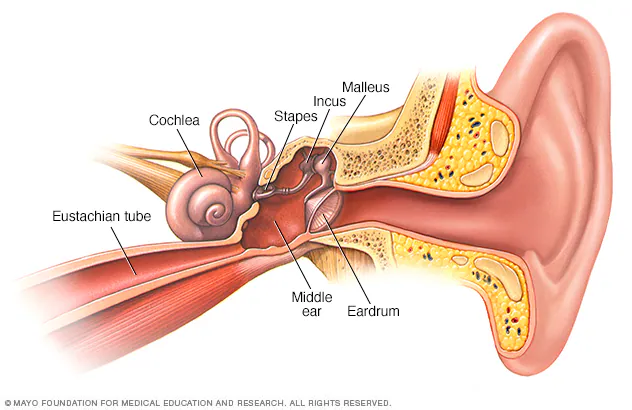
If the nasopharynx swells up by a sinus infection or hay fever, the eustachian tube can be constipated. When increasing or decreasing in altitude, this leads to a pressure difference between the middle ear and the atmosphere. This can cause the eardrum to bend in or outside.
This is why it’s not a great idea to fly if having a sinus infection because it can permanently damage your hearing.
When having this, you can get pain in your ears, pressing feeling or even cracks in the eardrums. This is called barotitis.
The eustachian tube is designed that air can easily escape through the middle ear. When climbing in a plane, most people doesnt have that much problems. The most problems are when descending, where the pressure will increase rapidly.
Barodontalgia is where teeth give a lot of pain because of the pressure difference. This pressure pushes on the teethnerves causing this pain. This goes away in time, as the pressure equals.
The circulatory system (de bloedsomloop) is the transportation of blood throughout the body. Blood transports oxygen and nutrients to organs and body tissues and collects garbage in the form of carbon dioxide (CO₂) and other garbage. The engine of this circulation is the human heart.
The heart is a specialized muscle which is a double pump:
The heart pumps around 60 to 80 times per minute at rest.
The heart rate will be controlled primarily by the sinus node (sinusknoop), which is a nerve node (zenuwknoop) in the heart itself. The speed where the node will fire signals is influenced by hormons like adrenaline.
Blood vessels are tube-like structures in the human body where blood flows through. There are 3 types of blood vessels:
The coronary artery (kransslagader) is the road of blood to the heart itself.
Blood pressure is the pressure of the blood vessels in the big circulation. This pressure is a result of the heart pumping in a certain speed. Blood pressure is measured in the two stages, and gives a double number. For a normal adult, the healthy blood pressure is 120/80 (mmHg or inches of mercury).
This gives us the 120/80 healthy condition which can defer for every person.
Most organs can survive some time without blood supply, but the human brain is very sensitive at variation of blood supply. This is why the human body consists of baroreceptors. These are pressure-sensors which are in the aorta and arteries which will measure the blood pressure. A low blood pressure is then corrected by increasing the heart rate or increasing the force of pumping.
Cardiovascular diseases (hart en vaatziekten) are the primairy cause of death in the western world. One because its a broad term and 2 because we are not living very healthy. Incidents that could be categorized as cardiovascular diseases are:
These diseases are caused by atherosclerosis, which means that the veins are full of calcic (kalk). This will then also cause bloodstols which is called thrombosis.
An heart attack and angina pectoris are coronal heart diseases. This is when the coronal veins/coronary arteries (kransslagaders) are affected. If one of the coronary arteries slits up by atheroscerosis, a part of the heart muscle will die because of a oxygen deficiency (zuurstoftekort). This is the definition of a heart attack. A cerebral infarction for the brains is the same principle.
At a high blood pressure, also called a hypertension the diastolic pressure is higher than 90 mmHg and the systolic is higher than 140 mmHg. A mild increase of the blood pressure will not give symptoms, but is one of the critical causes of atherosclerose and with this other cardiovascular diseases. When having a blood pressure of 160mmHg/95mmHg or higher, you will not pass the medical certification (class 2) you need for a PPL license.
The causes of hypertension can variate between such different items:
During normal conditions with normal gravity, a human is exposed to around 9,8 m/s of gravity. During maneuvers, this can increase where the power on a body can heavily increase. We will call this G-forces or gravity-force. This number states the force and is a factor of how heavy you feel opposing the gravity.
| G force | Description |
| 1 G | In steady flight, you feel as heavy as you are |
| 3,5 G | When pulling the yoke, you will feel 3,5 times as heavy as normal, feeling pushed into your seat |
| -1,2 G | When pushing the yoke, you will feel much lighter and will come out of your seat |
Humans usually tolerate positive G better than negative G because the blood vessels in the head are more sensitive to increased pressure. In both cases, its heavily recommended to stop your maneuver and keep the plane level.
In fighter jets, the pilots have a special suit (g-suit) which is very tightly around the stomach and contains pressured air. This helps the flow of blood and stops it from going to the feet. They are also specially trained with breathing techniques where they can be exposed to 9G for a small time, where normal people will pass out at around 4-5g for some seconds.
Eyes of a human person are built from glass-like material, which is a clear and jelly like liquid. The inside of the eye is for the biggest part the light-sensitive retina (netvlies). At the front of the eyeball, there is a lens and iris, which is the rainbow-membrane and the diaphragm of the eye. The pupil is the central opening in the iris.
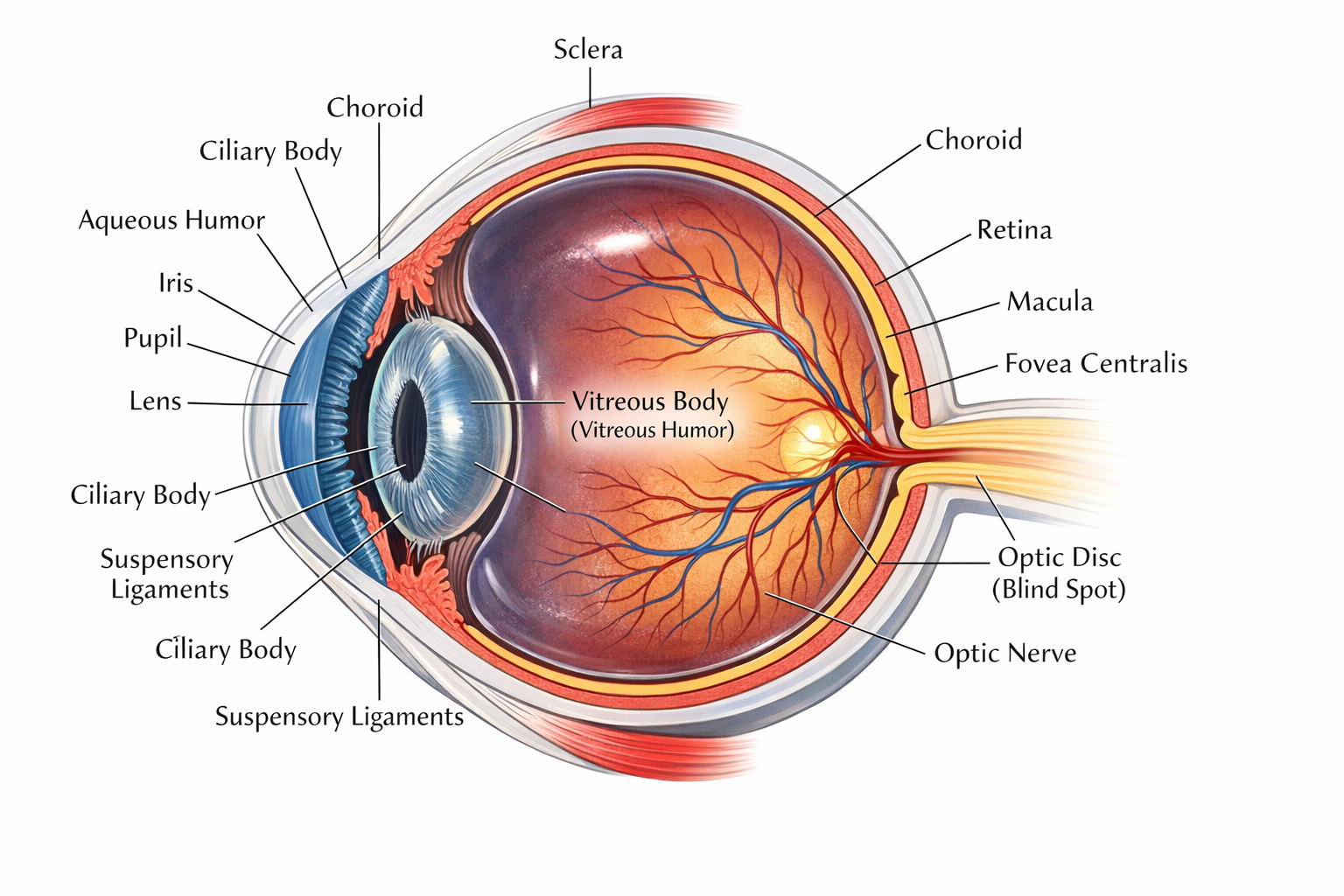
The eyes work realy similar to how a camera works. Light will be projected by the lens onto the retina which consists of light-sensitive cells. The signals of those cells will be transported by the eye-nerve to the brain. In the brain is the view converted to real pictures the human can see.
The iris is really similar to the apperture of a camera. In low-light area’s, it will become bigger to cach more light where it becomes smaller in light-rich area’s to compensate for the heavy amounts of light.
In the human eye, we have 2 components which helps getting a good view:
| Property | Cones | Rods |
|---|---|---|
| Main function | Vision in bright light and color vision | Vision in dim light / darkness |
| Light sensitivity | Lower sensitivity to light | Much higher sensitivity to light |
| Sharpness / detail | High visual acuity, good for fine detail | Lower visual acuity, less sharp detail |
| Neural connection | Often linked more individually, allowing precise vision | Many rods converge onto fewer cells |
| Best at | Seeing color and sharp details | Detecting light and movement in low-light conditions |
The area of view a human person can see is circle-formed and is around 90 degrees long to 60 degrees up.
The rods are concentrated on the yellow part, called the macula lutea. The center of the yellow spot is called the fovea and only consists of cones, without any blood vessels between. There is a very small area where you can see very sharp, of around 5 degrees up and width. This is the text you are now looking at.
In the part of the retina outside of the yellow spot, we have the peripheral visual field (perifere gezichtsveld). This part only consists of rods and you will not see very sharp in this part, but its great for seeing better in the dark. Our eyes are a combination of both things, making it all round. This part only has 10% of the sharpness of the central viewing part.
At the part of the retina where the nerves converge and transition into the eye-nerve, we dont have light-sensitive cells. This is the blind spot, called the Optic Disk. This sits around 15 degrees outside of the view of every eye.
To test your blind spot:
The visus is the rate of detail which we can see. The visus of the eye is always linked to the central viewing area. An eye with normal sharpness can separate details with the size of one arc minute (boogminuut). This is equal to:
This is called visus 6/6, 20/20 or 100%. Young children can have even more than 6/6 or 100%.
The sharpnmess is dependent on several factors:
Accomodating means setting your eye sharp. The lens of the eye can make itself ball or flat, respectively for seeing close by or far away. This proces is a lot harder from 40 years old where this completely stops around 65 years old. This is called presbyopia.
Some people have a different shape eyeball, which means no sharp vision can be projecten onto the retina. The most occurring types are:
Having such errors can speed up the presbyopia process when becoming older.
To estimate distances between objects as person, we need to see sharply in the distance. The brain will use both binocular as monocular reference points to convert visual information to a three-dimensional vision.
Stereopsis is the process your brain takes to combine two slightly equal visions into one big vision. Its making a panorama-picture realtime, the whole day long.
For seeing properly in low light environments, we use the rods in our eyes. The cones are barely adding something to this in low level environments.
The rods are outside of the yellow spot, thus the central vision, which is the reason you sometimes have to look about 5 to 10 degrees away from an object in the dark to actually see it.
For the most effective night vision, the rods have to adapt themselves to the darkness. This can take up to 30 minutes and will make a human eye about 1 million times more light sensitive. This is the reason when flying in the dark, the lights on board are also dimmed greatly. In case of emergencies, we dont have to adapt our eyes to the darker environment outside of the plane.
In the first 10 minutes, the cones will be more sentitive but the rods will take over after that. The speed depends on the first and second environment. How bigger the difference is, how longer the adaption takes.
Light adaptation is much faster than dark adaptation because the eyes are adjusting to light that is already available. At night flights, the cockpit and cabin lights are mostly red to not expose too much blue light. Blue light makes the light/dark adaption proces longer.
We have some bugs that people can have with their eyes:
The hearing organ consists of 3 parts
Lets take a look at this picture:
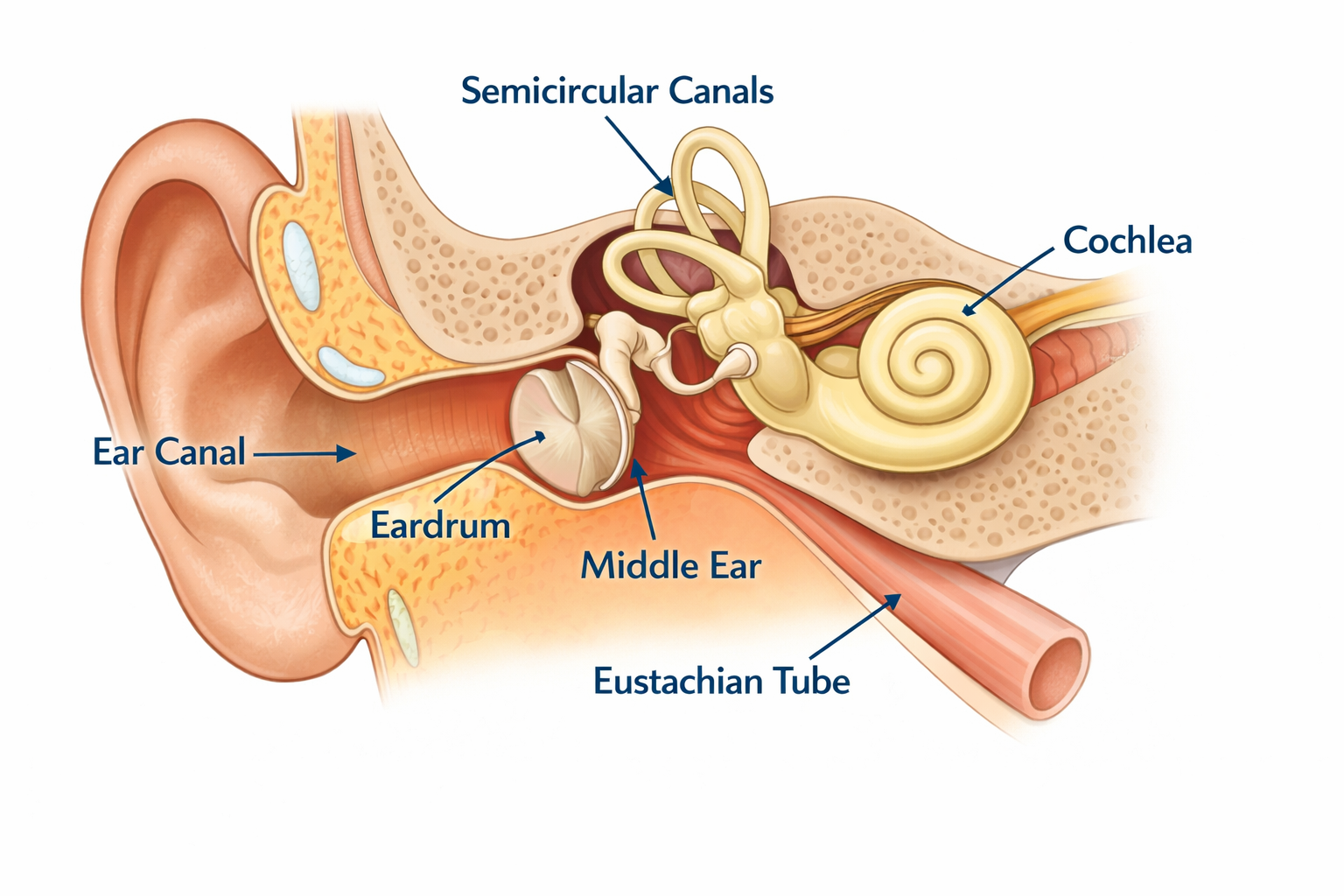
The outside ear is the outside part containing the ear-auricle (schelp), the ear canal and the eardrum. The auricle catches sound and will lead that into the ear canal. This will cause the eardrum to vibrate and convert the signals to the brain.
The middle ear is a air-filled hollow pipe connected to the Eustachain tube and this tube is connected to the nasopharynx (neuskeelholte). With this connection, the pressure can be similar in both the inside and outside ear.
The cochlea is the actual hearing organ, which is filled with moist. The vibrations of the eardrum will transported to the cochlea using some small bones. In the cochlea, some vibration-sensitive hairs are available which move with the sound and this transfers to the ear-nerve to the brain.
We also have the vestibule, which is the organ of equilibrium (evenwichtsorgaan).
The inside ear consists of the Cochlea and the Vestibule and can witness turning increases, linear increases and sound.
Sound is fast air pressure changes which the hearing organ can witness. These air pressure changes are called sound waves and are indicated in Hertz (Hz). 1 Hertz means one vibration per second, where human speaking sits from 500Hz to 3000Hz
The amplitude of the sound means how loud the sound is, measured in Decibel (dB). The decibel ratio is exponential, where every 3dB increase means twice the amplitude.
The ears and soudn transported to the brain can decrease over time. We have multiple types of defects:
When exposed to high levels of sound, the sound will increase the hearing threshold. This means you temporarily perceive this louder sound somewhat more quiet, indicating that your ears will start hearing loss.
Wearing a headset in a single engine plane prevents you from having hearing defects and will make you communicate much better than shouting.
In the inside ear are 2 organs located:
The vestibule itself also consists of 3 parts:
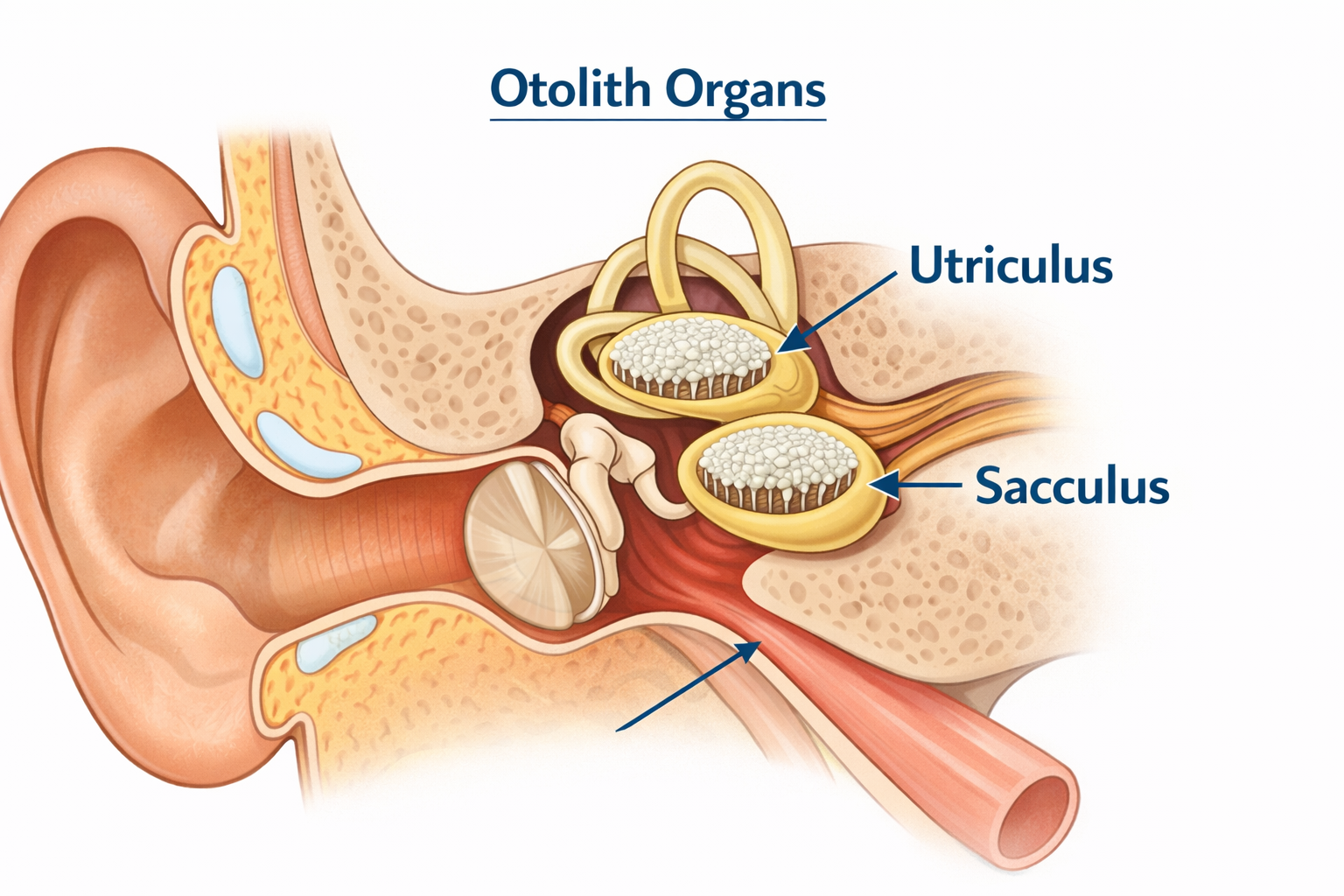
The otolith organs consists of 2 groups of hair cells which will be covered by a gelatined layer. At the outside, there are some calcium carbonate crystal which are the actual otoliths itself.
These two groups each have their weaknesses:
These organs detect linear speed increases. The otoliths have a higher density than the moist around, they will glow a little bit behind. The hair cells will move similarly and this gives us the feeling of moving.
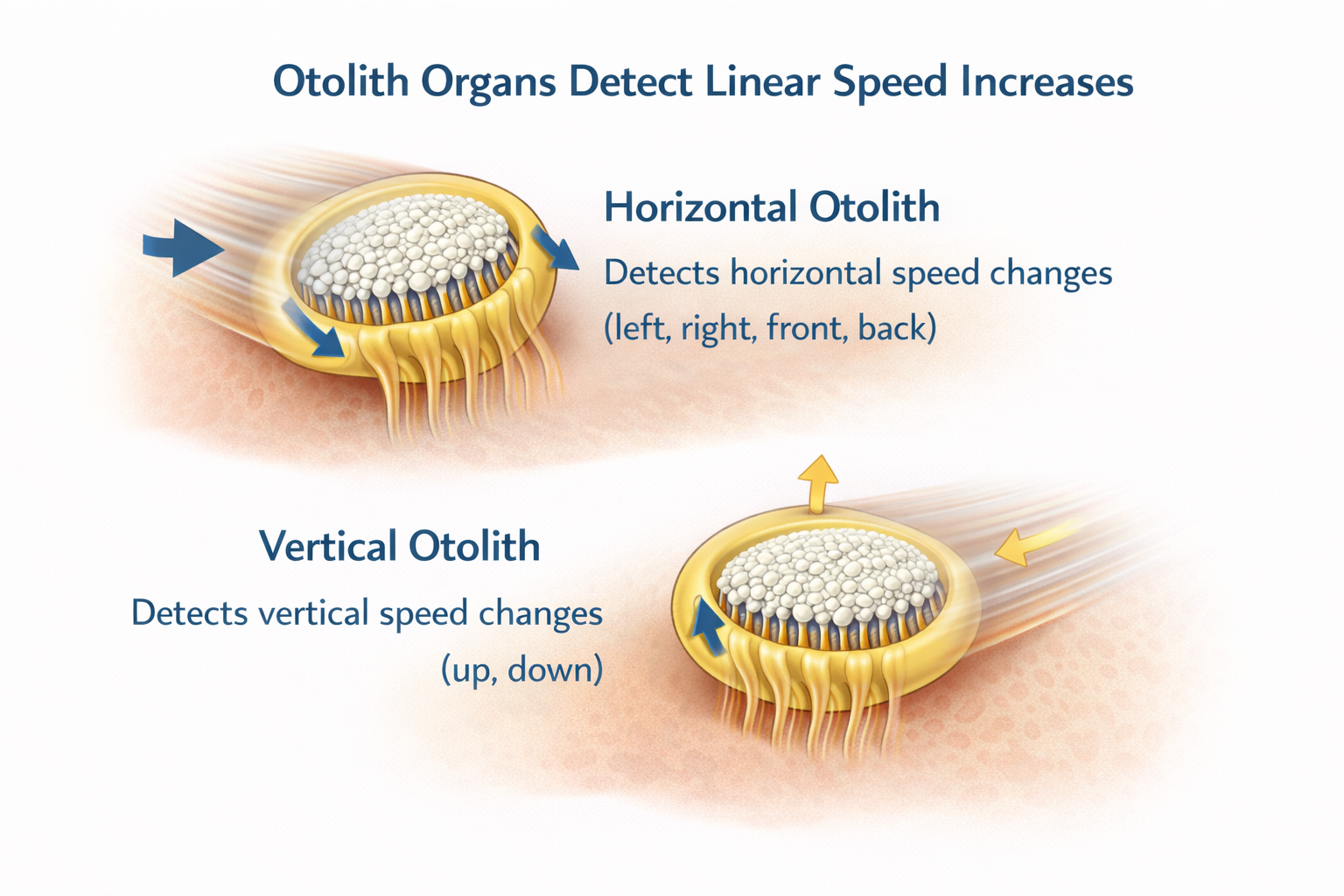
The semi circular canals are the three “half-circles” you see at the ear schematic. These canals are filled with fluids where one lays horizontally and the other two vertically. These canals detect angle speed increases as they both make an angle of 90 degrees and can detect rotations around all three axis:
When the head rotaties, the fluid will have a short latency because of mass-slowness. The movement of the fluid will be picked up by the small vibration hairs. If the rotation speed will stay the same, the feeling will disappear after a while when the fluid is stabilized.
Both the Otolith and semi-circular calans have a perception threshold, which must make a speed increase to notice. If the fluids don’t move at all, we can get illusions, like we don’t percept movements at all. The balance-setting will be applied when no speed increases are being percepted.
The balance-organ is not designed to feel a difference in gravity and centrifugal force.
Semi circular canals are sensitive for angular accelerations (hoekversnellingen/draaiversnellingen).
Air sickness is a movement sickness which is really similar to car sickness. It is primairily caused by contradictory information from seeing and feeling in your body. Flying with people that cannot see the horizon can also cause this.
Symptoms of air sickness are:
Air sickness can hugely decrease the normal functions of a human person. Good to know as pilot.
Air sickness is less common for people like pilots as they control the plane and are in sync of what they see, do and feel. Focussing on controlling a plane also helps getting enough cognitive effort.
One way to manipulate the body of passengers who are getting air sick easily is to give them some tasks, like making pictures of buildings, looking out for certain points of interests on the ground or help to look out for other traffic. This doesnt have to be al real task you need, only to keep them busy.
After a person is exposed multiple times to certain plane movements, the sickness will go away as the person adapts to the movements. Also avoid turning your head in situations with turbulence or heavy winds, as this also manipulates the semi-circular canals.
A human is continiously aware of the state of the body against the environment around it. This capacity of aerial orientation is the result of 3 components:
The combined information of these 3 systems will enable us to do handlings and coordinate movements. When one of those three will stop functioning or delivers wrong information, most all-day tasks are becoming very hard to impossible.
Because of all these instruments our human body has, there is a very important rule to note:
In a plane you will move around and fly horizontally just because your eyes see a straight horizon. When flying without any sights and on feeling, you will end up losing control over the aircraft within 60 seconds and even faster when banking.
Desorientation happens when the perception and orientation stops working. Your human body who was designed to feel and coordinate on the ground is tricked into things that do not happen actually. This is called an illusion, which is basically an incorrect perception.
Examples of illusions are:
The Leans illusion is the most happening illusion and can be very dangerous if not treated correctly.
We also have visual illusions, where we percept things differently than they are really.
To avoid desorientations, the most important rule is to not do VFR in Instrument Meteorological Conditions (IMC). Stay alert and keep your situational awareness and use the IM SAFE checklist.
In VFR flights, we mostly fly with the see-and-avoid principle, where we constantly look out for other traffic and avoid them as much as possible by sterring to the right. ATC does only completely separate VFR traffic in Class B airspace (Also in A, but we are generally not welcome there as VFR).
To look out for other traffic, we use a method called scanning, where we will keep a good picture of the fromt 180 degrees viewing field in front of the plane. We can switch for around 10 degrees and at least one second to actually separate the details/clouds from real threats in the air.
Some limitations of this principle aire:
This is why we would always sign into Traffic Information Services, have our Transponder enabled and TCAS if built in.
Flying in a wrong condition is prohibited by the dutch “Wet luchtvaart”. Before even thinking of touching a plane, we must first run through this IM SAFE checklist:
Someone who is really sick will not feel like flying. If not functioning properly in day to day tasks, you wouldn’t be flying either. We can have several idderent types of sicknesses:
If flying with a sinus infection or hay fever, the chance of these two symptoms is greatly increased:
When a pilot uses medicines, there are some things to look after:
If you are using medicines to suppress pain or other things, you must ask yourself if fit-to-fly. Some regulatory rules that forbids flying in these certain conditions are:
There are some medicines against coughing, which work by supressing the cough reflexes in the brain. They also give some feeling of sleepyness.
In some countries, we could buy cocktails of different medical cpmponents like:
They all are forbidden in the Netherlands because of the great side effects like sleepyness and seeing blurry.
Medicines that cause sleepyness are considered one of the most dangerous types of medicines for aircraft pilots. Those medicines can cause effects up to 72 hours like:
The general guideline is when taking medicines that cause sleepyness, wait at least 24 hours before controlling a plane.
Flying under influence of alcohol is forbidden, just like driving. In aviation, the rules are more strict because of possible damages. The general rule is that someone drinking any alcohol must wait to 10 hours before controlling an aircraft. In reality, people can have a decreased functioning even after these 10 hours.
A person is punishable when having more than 0,2 promille, which is 90 (µg/l) micrograms per liter. This counts for everyone doing flight preparations, executions and such.
Obesity or being overweight causes more diseases and people are a lot more sensitive to hypoxia and G-forces.
Smoking has both short-term and long-term effects on the human body. The long term effects are primarily in diseases, but some short term effects are applicable to flying an aircraft.
The circadian rythm is an internal clock of the human body where the internal temperature rises when we should be awake, and drops when we should be at sleep. This temperature range is about 1 degree celcius.
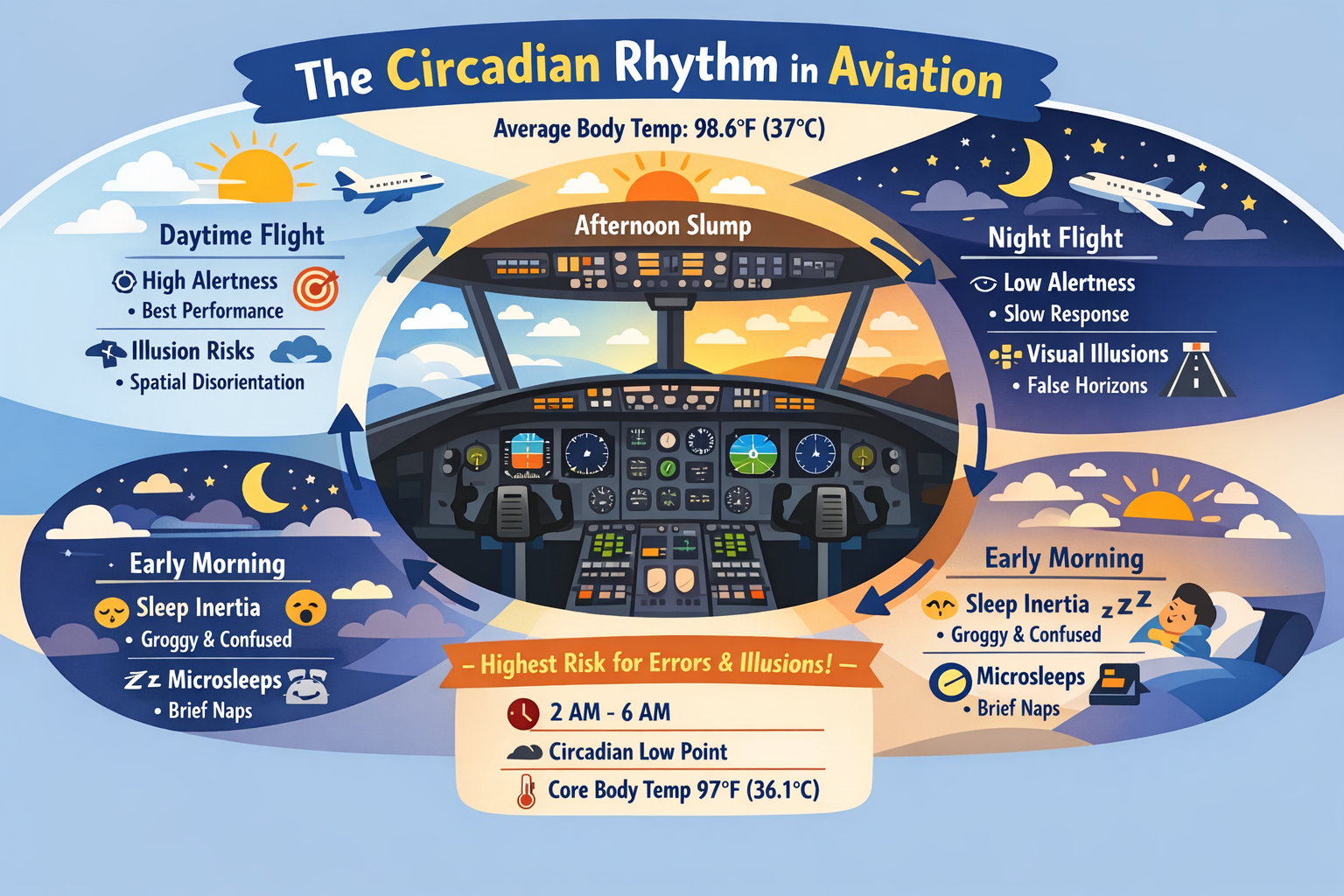
At night flying during the window of circadian low, this brings extra risks, like a decreased capacity of decision making and little less reaction-time. This is why pilots are not allowed to fly more than 10 hours per 24 hours.
We speak of two types of tirednesses:
One way to eliminate tiredness is to do power naps during the day. This is researched and can have a positive effect on the functioning of a person.
ICAO defines certain stuff as psychoactive:
Therefore all countries forbid the use of these stuff in combination with aviation. The only exceptions of this are coffee and tea.
A human that has eaten too less have a low blood glucose level. This is also called “hypoglycemia”. Being hungry can cause light sickness like dizzyness, tiredness and nausea (misselijkheid).
When being dehydrated, we mean that you have drank too less. Symptoms of dehydration are:
After ignoring those initial symptoms, more can arrive.
A human persion catches information by it senses. These senses are:
The senses are more of less sensors (to talk in IT terms) which continously register information and pass it to the brain. The human brain will select and combine the needed information and how to interpret this.
The first step in the process of information processing is perception (waarneming). This is a subconscious process where the information will be saved in your memory. We cloud also call this the sensory memory. Signals will only saved for several seconds here before being overwritten by new information.
After we will set our concentration on several infoemation, this will be saved into your short-term memory. This is where something we see will be converted into decisions and doing actions. However, this memory has a limited capacity of around 3 to 7 items with information, but we can prolong this items by continuously repeating it. Information in the short-term memory will reside there for a minute at max.
Some disruptions of short-term memory are
For the most part, if things are in your short memory and you need them to remember for flight safety, the best thing is to write them down. This helps extending the remembrance period plus you have it written down.
The long-term memory differs from the short-term memory by terms of capacity and retention-time. This part has an unlimited capacity and can save information for years.
This memory contains different categories of information:
However, the capacity is unlimited of the long-term memory, but very specific information can be lost very easily. Like “hey, how did I do this 3 weeks ago”. This is why making documentation andwriting things down can really help you. Exactly the reason I started my website.
The prospective memory is a small part where you think of tasks you have to do in the future. They could be forgotten if we don’t have a certain trigger (cue) for it. Like setting the altimeter on 1013hPa at the transition altitude or at work, doing something for your collegue, but simply forgot about it because no cue was given.
Exactly why we use checklist in the cockpit.
The vision that is projected onto the retina is a direct view of reality. You should think that everything will reach our brain without changes and thus is objective. However, this is called a bottom-up in the perception process.
In reality, everything we see is percepted by the brain. Depending on your activity, we expect certain things to happen, like our Cessna lifting of at 55 knots on the runway.
Human perception is not always 100% in sync with reality, and experience and exceptancy will also play their role in this:
This is the reason several people can have a completely different view of the same situation. An example is when flying IFR with an inexperienced pilot. The experienced pilot will carefully follow the instruments where the more inexperienced pilot will fly on perception. The experienced pilot will do this better.
In an earlier module, we already described some sense-illusions but we also have some visual illusions we must know and defend ourselves against.
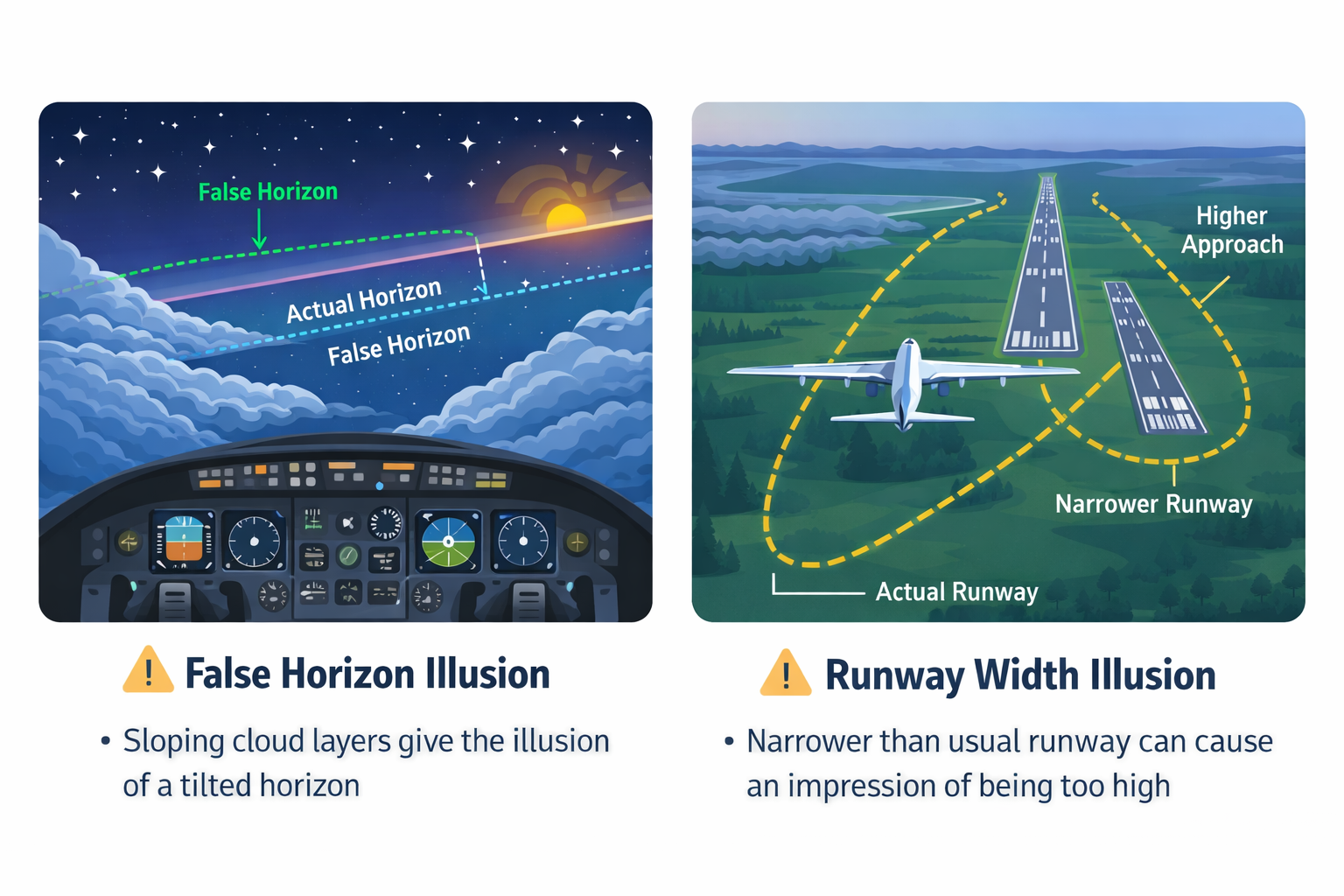
Illusions sometimes can be very tough to “un-see” but being with two pilots can help a lot. The most important is the context of where the illusion is in and this will depends on how we see and then percept it.
Attention is assigning thinking processes to certain tasks. Selecting is essential as we have a limited capacity and only want to focus on the essential parts which can be processed in our short-term memory. This is called selective attention.
A human person can delegate attention into what is called divided attention where more people, like 2 pilots, will delegate tasks to each other. This is where the principal of Pilot flying and Pilot monitoring comes from.
We also have attentional tunneling which everybody knows; thinking too long about one job and completely forget about the rest.
Vigilance (waakzaamheid) is the process where a person will actively be aware of the attention is spent on the right and essential things. This is important, as some repetitive tasks can lower our vigilance due to the repeating cause. This can cause adecreased level of vigilance, called hypovigilance.
Some causes for hypovigilance are:
The proces of human information processing knows some built-in limitations where we have to be aware of.
A great example of confirmation bias ending up fatal is:
A well-known aviation accident that is often used to discuss confirmation bias is Eastern Air Lines Flight 401, which crashed into the Florida Everglades on December 29, 1972. The crew became focused on a landing gear indicator light that seemed to suggest the nose gear had not locked properly. Because they were convinced the main problem was the landing gear, they directed most of their attention toward confirming and solving that issue, while failing to notice that the aircraft had begun to descend. The autopilot had been altered unintentionally, and the plane gradually lost altitude until it crashed. The U.S. investigation found that the crew’s attention was distracted from monitoring the flight instruments, allowing the descent to go unnoticed.
Automating tasks in the cockpit can drastcally reduce workload and with that stress and such in the cockpit. Navigating with charts are replaced with tablets with GPS, autopilot for climbing and descending/cruise and other systems. However all these cool things, there are some cons about automating tasks:
Decision making is a comprehensive cognitive process where a person needs to make choices. This process will start with perception and information processing, like described in the earlier modules.
In decision making, there will come a lot of human factors into play:
Normally, making decisions will happen in these steps:
To make safe and correct decisions, it is good to have a good situational awareness. This states that you exactly know what you are doing, what problem you need to solve and what things will help doing this. Also knowing where you fly is great. Without a good situational awareness you are sensitive for making errors which can lead in disasterous outcomes.
Situational awareness happens at three levels:
If this situational awareness is decreased, your own reality does not match with the actual realtity. This will improve the chance of any wrong decision (garbage in, garbage out)
Factors that decrease situational awareness:
We can prevent and restore situational awareness by doing those things:
Good flight preparation and communication in briefings before a flight is a great way to enhance situational awareness.
To make a decision, you need to follow several steps. In the first place you need to assess the risks and the situation. Then all different options must be viewed and analyzed and the right option must be chosen which will overall give the best result.
Risk assessment and consideration of alternatives will differ from person to person. Also the pilot, plane, environment and 3rd party influence will all count towards this.
Decision making is not a objective process. Different persons will make different decisions based on the same situations. This all syncs with the personality and attitude of a person. Some persons are really fast at understanding a problem and will take a immediate decision, where other people need to write all different options down and (over)think them.
Some attitude exists, but must be prevented at all times:
| Attitude | Symptom | Remedy |
| Macho | “Look at me, im better than you” | “Don’t take unneccesary risks” |
| Anti-authoritarian | “They can go to hell” | “Rules are there to prevent accidents” |
| Impulsivity | “Do something” | “Think, than execute” |
| Invulnerability | “That will never happen to me” | “Everything can happen to anyone” |
| Resignation | “What does it matter?” | “Everyone can make a difference” |
Decision making in groups can have positive and negative effects.
We will call a human error such if a human decision does not stroke to the intention, leading to a unwanted result. Causes leading to human errors are liked described in earlier modules.
Human errors are for example:
Actively violate rules are not human errors but violations with possible law-outcomes.
In a human life, it is really critical to learn from errors we make or that other people make that can happen to you also. This is why every aircraft incident is thoroughly researched and the local authorities will create a final report with their recommendations described. They will fill the report with at least these information:
The root purpose of this report is to learn from errors, not to point fingers at different orianizations and such. However, it is possible that certain organizations or individuals may be prosecuted (berecht) by law for negligence (nalatigheid) or for knowingly taking the wrong actions.
To learn from everyones errors, it is also important to note errors that does not lead directly to incidents. Pilots will only report their own faults if the company culture is open, and good. If the company is very toxic or closed with lots of punishments available, they will severely less open to speak about their own faults.
Therefore, in any company with pilots, there need to be a culture called “just culture”. Errors by pilots must not be directly leasding to the loss of license or work but into extra simulator training or personal training to actually become a better pilot. Only punishing and whining about errors resulting in lots of paperwork doesn’t make anyone a better pilot. Just culture must know what has gone wrong, not specifically what person did this.
It must be noted that actively violating rules and laws on purpose is a completely different story.
The human body consists of mechanisms which adapts to the physical and physich threats (stressors) in its environment. The reaction of the human body is called stress, which we know 3 causes of:
Note that 2 and 3 are different, altough the word might look the same.
Some events can cause the human body to build specific hormones, like adrenaline. This can also happen in the cockpit, where the human body will go in the primitive fighting mode. The hearts pounds faster, breathing goes faster and muscles will get more blood. This also can cause hyperventilation.
Stress has a lot of causes for a person to function, where it decreases its function level:
Stress can therefore work against you, when in a degraded level of functioning where also having less concentration on the situation. It can also cause you to decline recently learned tactics, and do regression, where you pick up older methods you are more familiar with.
During acute stress, our body will flow through these phases:
Its no suprise that stress is a primary cause of how we perform. To further clarify that, there is a graphic from Yerkes and Dodson, clearly stating how those two are related:
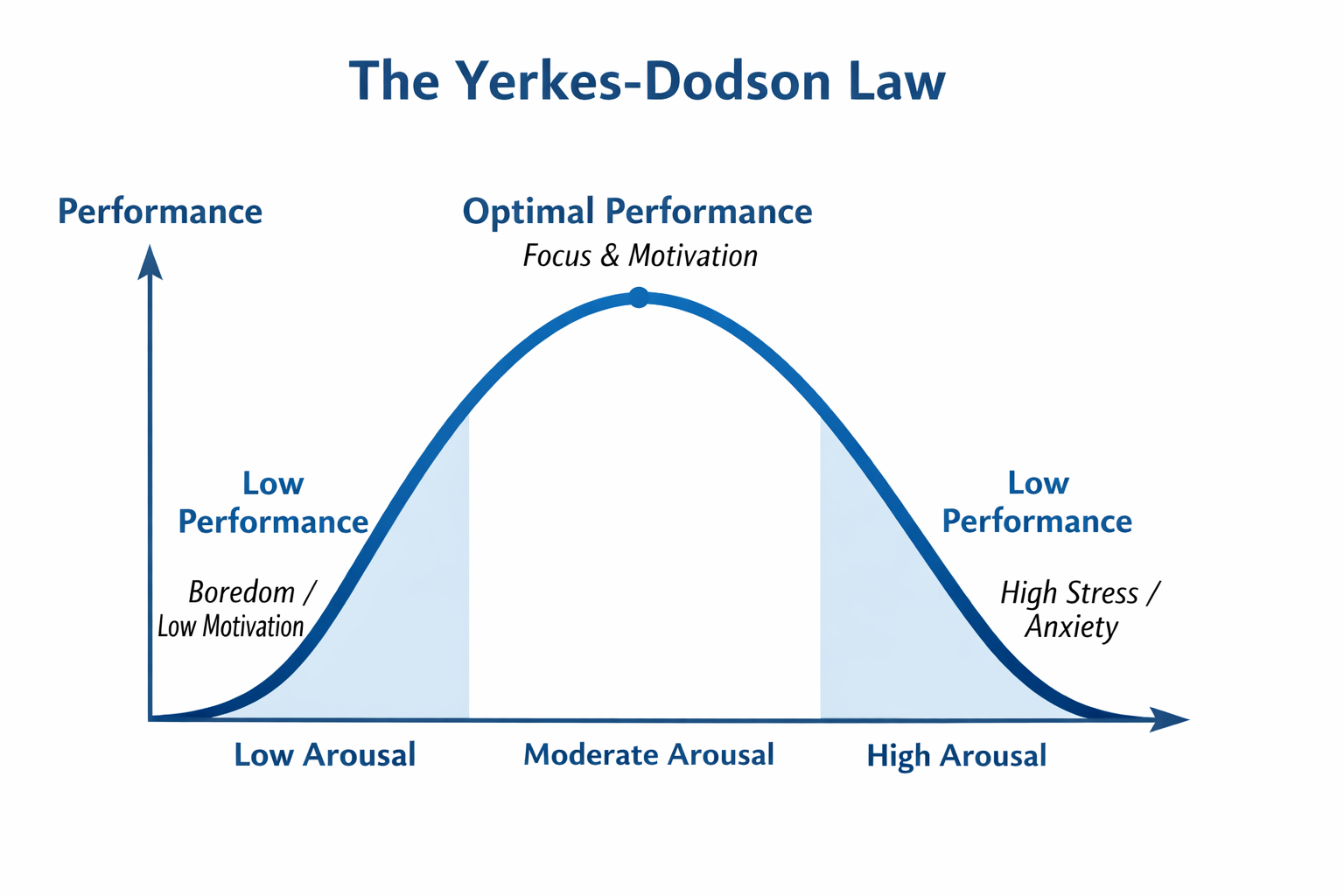
The best levels of performance are in the middle, where we have some pressure to do things the right way and at the level we need. Low stress can cause some boredom and disinterest, where high levels causes anxiety and the things already described.
Stress is also cumulative, were every waterdrop helps overflowing a glass of water.
Every person will act different under similar conditions. One person will totally overflow and freak out where the other laughs a bit and solves the situation. It all is dependent on personality and perception.
Decreasing stress levels by specific strategies s called coping, and strategies that work are different for every person:
One final sentence to think about:
Henry’s Law states that the amount of gas dissolved in a liquid is directly proportional to the pressure of that gas above the liquid. In simple terms: the higher the pressure, the more gas dissolves in the liquid. When the pressure decreases, the gas comes out of the liquid again.
A simple example is a soda bottle: when the bottle is closed, carbon dioxide stays dissolved because of the high pressure. When you open it, the pressure drops and bubbles form.
A real life scenario of this phenomenon is decompression sickness.
Decompression sickness happens when pressure decreases too quickly, causing gas bubbles to form in the blood and tissues. It is commonly known as:
A more specific medical term is alternobaric vertigo, which means vertigo caused by a pressure difference between the two middle ears. This can happen when flying with a sinus infection.
HPL (Human Performance & Limitations)
Oxygen and circulation
G-forces
Hypoxia and breathing
Physiological vs non-physiological responses
Barotrauma and pressure
Vision and perception
Importance of vision
Fatigue and substances
Situation awareness
Human performance (Rasmussen model)
Personality = genetics and environment. Non-punitive vs Just Culture → no punishment approach.
You have reached the end of the page. You can navigate through other blog posts as well, share this post on X, LinkedIn and Reddit or return to the blog posts collection page. Thank you for visiting this post.
If you think something is wrong with this post or you want to know more, you can send me a message to one of my social profiles at: https://justinverstijnen.nl/about/
If you find this page and blog very useful and you want to leave a donation, you can use the button below to buy me a beer. Hosting and maintaining a website takes a lot of time and money. Thank you in advance and cheers :)
The terms and conditions apply to this post.
For a live overview of my flight lessons, visit: https://flighttools.justinverstijnen.nl/flightlessontracker
This page can contain a collection of personal notes, steps to remember, finished and unfinished content. Please excuse brevity.
Do not use specific information given like fuel flow, landing/take-off distances for your flights. Always refer to the POH of your exact plane for flight preparation. My information is just for references that I used.
Because the whole world uses aviation to get from A to B, the world needed an organization that will monitor, review and publishes rules for aviation. This is the International Civil Aviation Organization (ICAO), founded in Chicago in 1944. The primary rule was to standardize aviation around the world.
In the Netherlands we have the so called “Wet Luchtvaart” (Aviation Law) and contains all the basics of ICAO themselves, changed for this country. This contains mostly some minor changes from the EU laws.
From the 1944 conference, ICAO was founded and almost all countries around the world are member of this. ICAO publishes guidelines and advisories for countries to adopt to ensure safety but countries are not required to do so. EASA in Europe is an other story, that are laws that all European countries must follow.
The goal of this conference was to found an organization, ICAO, that creates standardized rules which all pilot in commands around the world must adhere to. From this conference there was signed the Treaty of Chicago which contains a huge load of rules in Annexes, which are attachments to the treaty:
| Annex number | Description |
| Annex 1 | Personnel Licensing |
| Annex 2 | Rules of the Air |
| Annex 3 | Meteorological Service for International Air Navigation |
| Annex 4 | Aeronautical Charts |
| Annex 5 | Units of Measurement to be Used in Air and Ground Operations |
| Annex 6 | Operation of Aircraft |
| Annex 7 | Aircraft Nationality and Registration Marks |
| Annex 8 | Airworthiness of Aircraft |
| Annex 9 | Facilitation |
| Annex 10 | Aeronautical Telecommunications |
| Annex 11 | Air Traffic Services |
| Annex 12 | Search and Rescue |
| Annex 13 | Aircraft Accident and Incident Investigation |
| Annex 14 | Aerodromes |
| Annex 15 | Aeronautical Information Services |
| Annex 16 | Environmental Protection |
| Annex 17 | Security and Unlawful Interference |
| Annex 18 | Transport of Dangerous Goods |
| Annex 19 | Safety Management |
The treaty explains that every country has full control over their own ground area and the air above the ground. It also explains that the water around countries are member of that country, at least within 12 nautical miles (22km) from the coast. Within those 12 nautical miles, the country is responsible for closing the airspace and control it by monitoring and giving clearances.
The treaty explains that the participating countries will permit access for uncontrolled flights like from private pilots without landing in the country. This is called the freedom of the air, which gives you the right to cross airspace from another country, with a possibility to make a diversion or emergency landing. This also gives commercial freedom, like transferring passengers or goods to another country.
However, the country where you land can determine if your cargo must be checked or forbid certain goods to ship into the country. Here the country where you land has the lead, because of the sovereignity. They can also forbid, or lead you to a different route in case of emergencies or international emergencies (like war).
A country can also force you to land in their country if they want to check your passengers or cargo. This is called a Safety Assessment of Foreign Aircraft (SAFA) check.
All participants of aviation of the treaty are required to comply with as much rules as possible of the treaty. These rules are described in Annex 2. The best thing is that the whole world uses the same rules, but some countries are more strict than other countries, especially the USA as a result of the 9/11 attacks.
A plane can be used to transfer cargo and passengers, so the customs of a departing and landing country must use an airfield with customs, which will check if everything is following the rules. You may only plan to fly an international flight when departing from an international airfield.
The treaty of Chicago states that aircraft can be allowed in a country without paying customs or other costs for fuel, oil, spare parts and extra stuff. This would make it impossible as every country has their own rules for taxes and importing goods.
It can also be required for international flights to submit a General Declaration. This requirement is mostly when flying outside of the Schengen-zone, incoming or outgoing.
On every flight it is required to have these documents on board:
The board devices of the plane must comply with the minimum requirements of the country where the plane is registered. When using the devices, the rules of the country below the plane apply.
For the radio’s, only qualified personnel that have a RT certificate may send over the radio.
Countries can forbid you to use cameras on board of aircraft. In most countries, there are restrictions on making pictures of military facilities. In the Netherlands, there was a very restricting law that forbid most of the pictures from the air, but was suspended in 2013.
All aircraft must be registered in the national aviation register and will receive a registration number. This number must be short, but with the most combinations possible.
In the Netherlands, this is done by the “Inspectie Leefomgeving en Transport” (ILT).
Registration numbers will be made up in two parts:
Some examples will be:
Every country has it’s own code, which you can find here: https://www.avcodes.co.uk/regprefixcur.asp
Here is an example of the registration numbers and method in the Netherlands:
| Aircraft type | Naming Convention | Example |
| Planes, Helicopters and Hot air balloons | 3 letters | PH-JSV |
| TMG’s and Gliders | 3 or 4 numbers | PH-2653 |
| Microlight aircraft | Number-Letter-Number | PH-6H9 |
| Unattended aircraft (Drones) | Number-Letter-Letter | PH-8SD |
Some sensitive combinations are not included, and may not start with “Q”.
The registration number is like a license plate for a car. A unique number, instead of “A red or yellow plane”. There are some requirements for this number to be visible:
There are some specific guidelines for visibility
Most of the rules in the EU about aviation are described in the Standardised European Rules of the Air (SERA), or called No 923/2012 which can be found here: https://eur-lex.europa.eu/eli/reg_impl/2012/923/oj/eng
Countries can deviate from these rules but must align with the rules described in the SERA as baseline.
In an aircraft, the Pilot in Command is responsable for a flight following the rules. Violation of rules is only permitted in emergency situations.
For types of flights, we have 2 collections of rules:
Commercial flights will always fly on IFR to reduce the workload of the captains. Also, they very often have to fly through cloud layers where flying visually is not possible.
We have some general guidelines for flying in the air. These rules are based on:
There are some special events that could happen:
When flying a circuit around an aerodrome or airport, these rules apply:
To fly VFR, flight conditions must be at least the rules below:
In airspace classes F and G, its allowed to reduce the required visibility below 3000ft. In these special conditions, you may fly with 1500 meters visibility:
When flying VFR in CTRs, you must follow these rules:
When flying VFR, you have the following limitations:
When you want to fly VFR at night, you must comply with these rules:
To define hen its day and night, we have the following rules:
Some countries, like the Netherlands, have a defined “Uniform Daylight Period” (UDP), which defines the start of sunrise and end of sunset on average for the whole country. This is published in the AIP.
When flying VFR, you must comply with these altitude rules:
You may only defer from these VFR minimums when performing these actions:
Of course we hope to never need this part of information, but it’s crucial to know. What to do in distress situations, which are the most dangerous, where life is on the gamble.
When an aircraft is in immediate danger, the following steps must be done as pilot in command:
An aircraft that is in danger is allowed to do everything just to get attention. If this includes a low fly by or calling the LVNL (in the Netherlands) by phone, this is allowed.
The number of the LVNL which could be called in case of emergencies is: 020 406 3999 (source: https://www.lvnl.nl/contact#anchor-d1e22f2a46cf4e81b142c96f01eb99ce).
In the case of an emergency situation, which is where an aircraft needs priority but not immediate landing, instead of MAYDAY we use the phrase PAN PAN, PAN PAN, PAN PAN. Stating that we need priority caused by an error on board, smoke of strange smell or a person getting sick or incapacitated.
When flying into a danger zone or restricted area, its possible that you get some radio calls to defer your course. Its also possible that flares in red and green colors (every 10 seconds) are shooting into the sky where people on the ground warn you about the possible danger you are to encounter. You as pilot in command should always leave the area as quickly as possible. If this takes a 180 turn, do that.
Its possible if the aerodrome thinks your radio isnt working, that you get visual messages when in the circuit. This can be confirmed if you don’t hear anything on the radio like a response to your message.
The visual messages are also stated in the COM course, and therefore a link to that section:
Some clear notes to remember them good:
To confirm messages given visually, you need to make clear that you saw, understand and performing them. This can be done:
If any radio failure occurs on an aerodrome or aircraft, the aerodrome will put some ground signs at a certain place. This can be at the runway itself.
Here is an overview of the different signs you could encounter. They are also described on the back of the VFR chart.
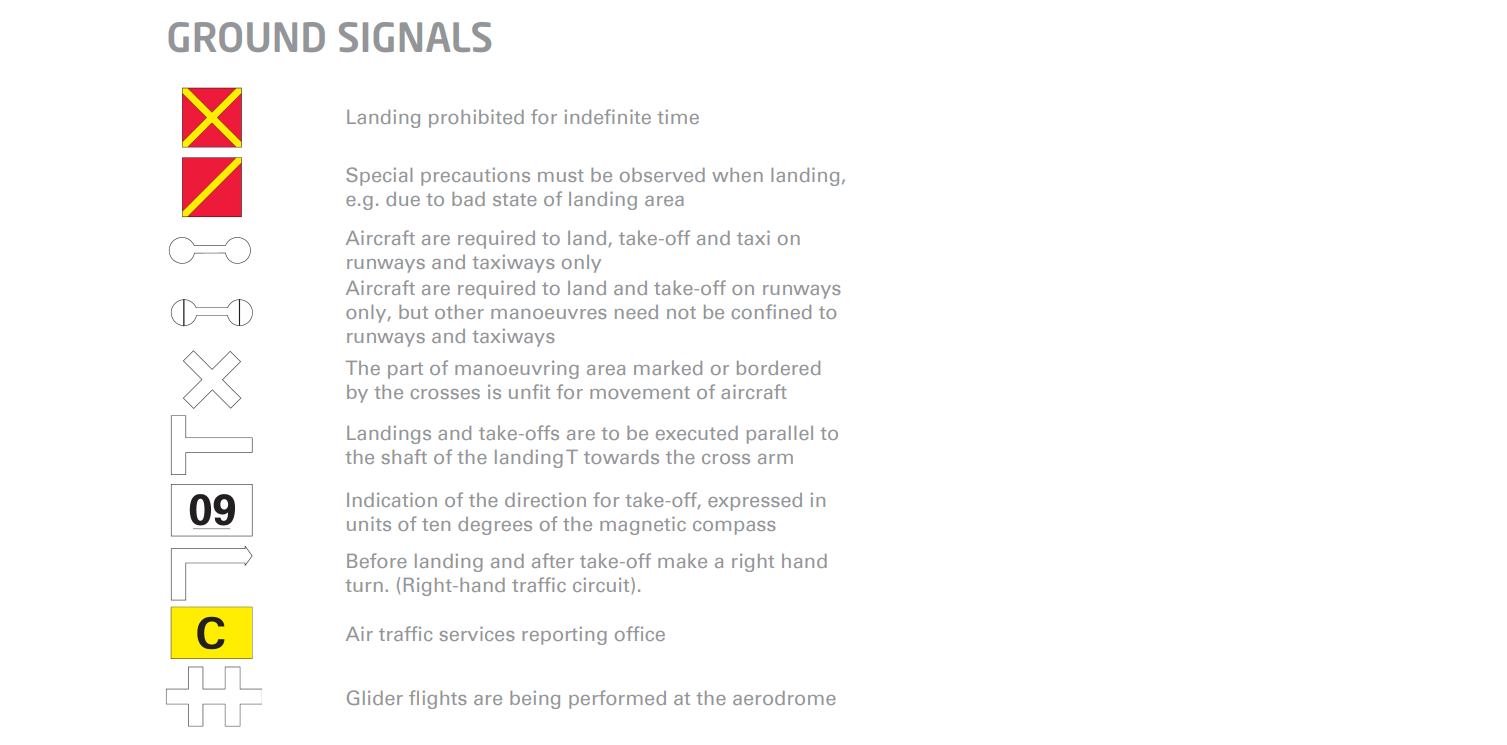
These signals are physically on a large banner which the aerodrome has to put at a certain place in case of emergencies. Physical and visual does always work.
At an airport, there is a chance that a marshal will give you instructions about what to do. This will mostly only happen at controlled airfields.
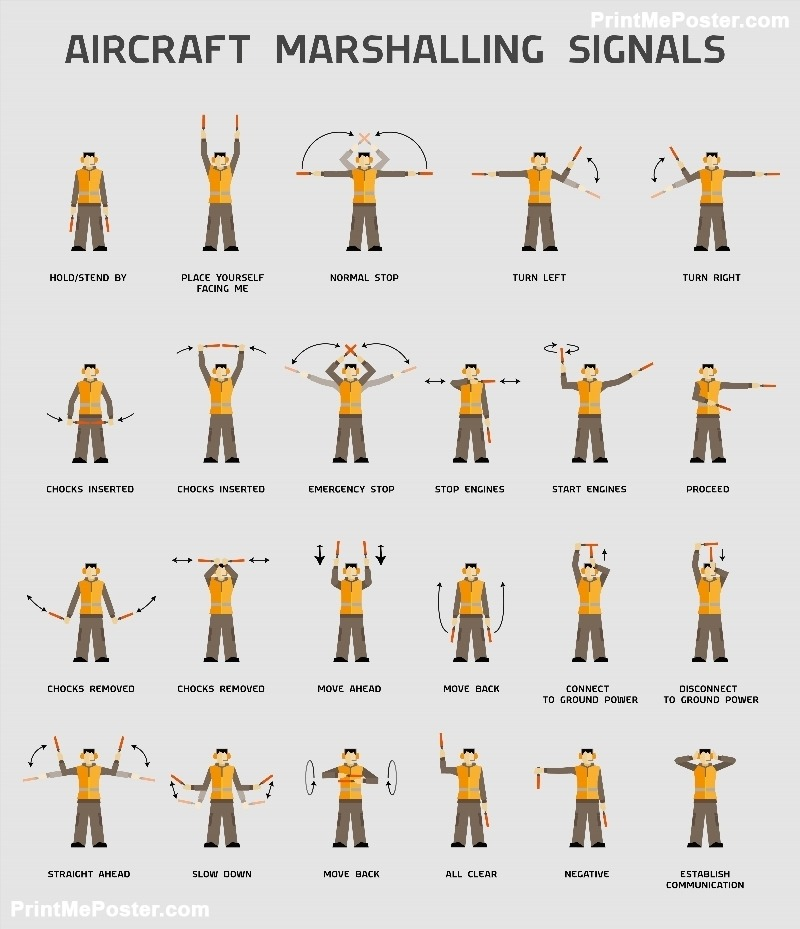
Some additions to the signs that can be given by marshalls:
In case of unlawful interference, we mean that the aircraft is interfered. This can be a hijack or weaponized aircraft where people in or outside of the aircraft can be in danger. You as pilot in command are asked to do the following actions (if possible of course):
If an aircraft does not comply with rules, for example flying in a restricted area, the aircraft can be identified, call out or intercepted by the military. In the worst case scenario, there will be a fighter jet flying next to you to check what you are up to.
In this situations, do the following steps:
| Phrase | Meaning |
| Callsign | Your callsign is? |
| Descend | Descend to land |
| Follow | Follow me |
| You land | Land on this airfield |
| Proceed | You can proceed your flight |
Based on the situation, its possible to answer the actions:
| Phrase | Meaning |
| Callsign | My callsign is … |
| Wilco | Roger, I will follow your instructions |
| Unable | I am unable to follow your instructions |
| Repeat | Please repeat your instructions |
| Am lost | I am lost or no GPS fix |
| Mayday | I am distress traffic |
| Hijack | I am hijacked and possible need some help |
| Land | I am asked to land on … |
| Descend | I have to descend to … ft. |
The fighter jet can also give some visual instructions:
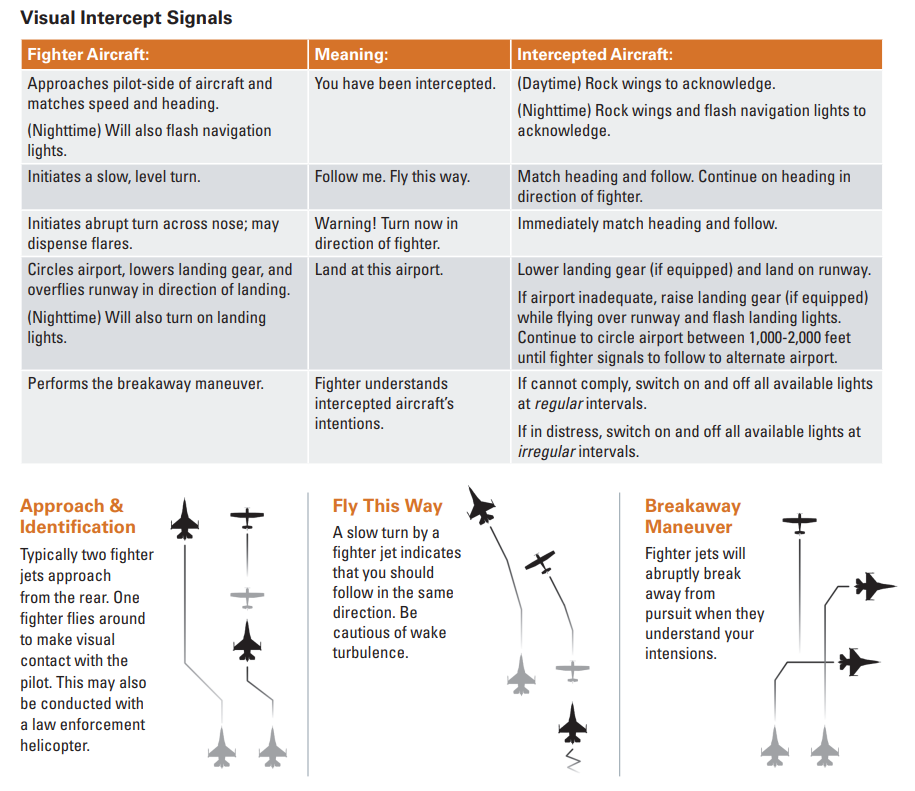
Air Traffic Control (ATC) is for the highest safety possible when flying an aircraft. Because ATC has an overview of all aircraft, their task is to make it safe for everyone by separating aircraft from each other, leading them to certain points etc.
The full list of tasks of ATC:
There are 3 types of air traffic service:
The structure of services and their responsibilities is shown on page 44. ¥
All airspace parts are together managed by a Flight Information Region (FIR). This is separated for horizontal areas, like the Netherlands is member of the Amsterdam FIR. Belgium is member of the Brussels FIR and so on.
A FIR is a region where all three types of air traffic services take place. Bigger countries like France and Germany have multiple FIRs (4 to 5) to separate the workload.
On page 44 is described that there are multiple manners of separating airspace next to A to G. This must be researched. ¥
On page 45 there is also a vertical view of the Schiphol (EHAM) CTR, please review thoroughly. ¥
Some simple rules apply for the Dutch airspace:
This is all page 45.
Air Traffic Control areas are as the name suggests, areas where ATC provides control to your aircraft. This happens mostly with IFR flight rules.
Air Traffic Control areaa are:
Same explaination as already done, search for the complete table for a copy. ¥ (Page 47).
Airspace classes can also be temporary active. Always refer to the NOTAMs when planning a flight to be sure you are allowed and flying in the airspace you are supposed to be.
VFR flights are mostly uncontrolled, but in some cases they will be leaded by Air Traffic Control:
A highly advisable note: being controlled by the tower doesnt nessecarily mean that you are being separated from other IFR or VFR traffic. Please refer to the air space classes definitions. (Page 49).
In uncontrolled airspace, like E to G, its highly advisable to sign into the Flight Information Services. These will give you important information like:
In the Netherlands, we have two Flight Information Services:
You always have to sign in to FIS by describing your flight:
They will respond with a message to maintain your flight, important information and a regional QNH which you must set. Sometimes they give you a special Transponder code.
In the Dutch LAW, we have two separate laws for aerodromes:
Its required to always use airports for take-off and landing. The only exception is when in a distress/emergency situation and you have to do a forced landing.
Gliders and hot air balloons are allowed to take-off and land from any land that is applicable. The same applies for police or emergency choppers.
Civil aviation is forbidden to use military airports, except if they have a special clearance.
The podition of an aerodrome is fixed by a clear GPS point, called the Aerodrome Reference Point (ARP) and is mostly the geometric center of the aerodrome. This will never change in normal situations, but an aerodrome can expand so a new ARP has to be assigned. This ARP is mentioned in the AIP.
Already described somewhere, look that up and adjust. ¥
Described on page 59, good to review further.
Page 66
In this part we will describe all rules about working with Air Traffic Control.
For VFR flights, it is required to submit a flight plan. This flight plan contains some general information of your planned flight, like:
We have to submit this at least 30 minutes but preferrably 60 minutes (maximum of 5 days ahead) before starting. Your flight plan can be transferred between ATC units so everybody knows exactly what your intentions are.
However you may sumbit a flight plan for every flight you do, it is only required by law in the following circumstances:
We can submit a flight plan by using the following methods:
Submitting a flight plan by radio has its own rules to comply with:
You can also do a flight without a flight plan, but is only permitted when following these rules:
Submitting a flight plan can have a huge advantage for search and rescue missions, as they know your intentions.
Sometimes a change of flight plan is needed. Maybe the destination or alternate has changed or the number of passengers.
A change in flight plan has to be submitted at least 30 minutes before departing. If the delay is more than 30 minutes, you are required to cancel the flight plan and submit a new one.
In flight, you must follow your flight plan, and if your speed does defer 5% or more you have to notify the flight information services or ATC.
When your flight is completed, your flight plan must be closed. This means the towers and ATC knows your flight is over and all processes stops. It is possible that if you forget to do this a search and rescue mission will be started, which you have to pay.
To close a flight plan, do one of the following options:
When closing your flight plan, you must notify the following information:
If landing is not possible at your planned destination, we have to divert to our alternate aerodrome or make a forced landing. In this case, we have to notify our planned destination by phone. This can be the control tower or ARO.
In our plane we have the altimeter which actually measures pressure based on a reference point. This reference point is the QNH, the actual, mean pressure on sea level.
Because in some areas planes must be on the same page, we have regional QNHs, so multiple planes are flying on the same reference point and collisions can be avoided.
When flying above the decided transition altitude, we switch our QNH to 1013 and we fly on flight levels, ending on 5. FL55, FL65, FL75 etc. IFR flights will take the rounded levels like FL60, FL70 or FL80.
In the netherlands, the transition altitude is mostly around 3500ft. The transition level is 1000ft higher. For avoiding collisions, its not permitted to cruise between the transition altitude and level, as this is for corrections of multiple, different built altimeters or pilot errors.
When descending, we will asap set the local QNH to make sure we fly at the correct setting and having the ground at the planned distance.
For deciding our flying altitude, we use the semi circular altitude system. This means we pick our altitude based on magnetic ground course. VFR flights pick flight levels ending on 5, IFR picks flight levels ending on 0.
Great dutch way to remember: Oost = oneven.
Because our altitude meter doesnt measure exact altitude above ground but the pressure difference from a reference point, we can select multiple reference points.
The altitude meter may defer a bit but not more than these values:
page 83
Medical class 2 is EASA approved and valid for this periods
In this module, we will go deep into the rules for preparing a flight and then executing it according to your plan.
The 3 most important subjects in this module are:
All rules in this module are according to ICAO Annex 6, called the Operation of Aircraft - International General Aviation). For Europe we have the Air regulations 965/2012 where for PPL pilots, the Non Complex Operations part applies.
The pilot in command of an plane must ensure every flight is prepared. This minimizes the chance of mistakes or worse things from happening.
The information a pilot must gather before performing a flight is:
The Aeronautical Information Publication is required by each country to host and publish where all rules will be described. Therefore this has to be publicly accessible. The AIP contains all information that is relevant for flight preparation and safety for people in and outside the plane.
The AIP always looks like this:
Here are 2 examples of AIPs of different countries:
The Netherlands:
Norway:
You see that the format and information separation is the same for both AIPs. A list of AIPs for all countries can be found here: https://wiki.ivao.aero/en/home/operations/Global-AIP
The AIP can change in two ways:
The AIP will change in a cyclus of 28 days, this is not every month. The effective dates are worldwide described:
The AIP of the netherlands has changed every 28 days in the last months.
The new admendment changes has to be released 42 days before becoming effective so everyone has time to implement.
NOTAMs are pieces of information that are important for day to day flight preparation. They are recognized as essential information before taking off.
NOTAMs are not published in the AIP, because this has two reasons:
NOTAMs are effective information for pilots to know. Some examples of NOTAMs caused are:
NOTAMs will be separated into 4 different classes:
There also exists a ASHTAM, which is a very special and rare NOTAM which announces volcanic ash in the area. In the Netherlands, we don’t have volcanoes, only dykes. :)
Dutch pilots can view NOTAMs on the website https://homebriefing.nl, which is the International NOTAM office (NOF) of the Netherlands. Also NOTAMs from adjecent countries are announced in the Homebriefing website. This is part of the Aeronautical Fixed Service (AFS).
NOTAMs are pronounced as partly coded information and some abbreviations. An example of a NOTAM effective at the day of writing this:
(A0116/26 NOTAMN
Q)EHAA/QOBCE/IV/M/A/000/999/5227N00531E005
A)EHLE B)2601120600 C)2604122200EST
E)MOBILE CRANE BTN PSN 522654.4N 0053040.1E AND 522656.6N
0053044.1E, BTN 553M AND 655M BEYOND THR RWY 05 AND 235M RIGHT FROM
RCL. 160FT AMSL, MARKED AND LGTD.)
I will break this NOTAM down:
| NOTAM line | Description |
| A0116/26 NOTAMN | Series, number, (New) |
| Q)EHAA/QOBCE/IV/M/A/000/999/5227N00531E005 | FIR Amsterdam, Obstacle, Crane, Erection, IFR/VFR |
| A)EHLE | Lelystad Airport |
| B)2601120600 | Start time: January 12 2026 at 0600 UTC |
| C)2604122200EST | End time: April 12 2026 at 2200 UTC (Estimated) |
| E)MOBILE CRANE BTN PSN 522654.4N 0053040.1E AND 522656.6N 0053044.1E, BTN 553M AND 655M BEYOND THR RWY 05 AND 235M RIGHT FROM RCL. 160FT AMSL, MARKED AND LGTD | Crane at GPS coordinates, around 600 meters from threshold runway 05, 160FT AMSL high, marked and lighted. |
As you can see, such NOTAM is very specific and contains safety messages. In this case we are warned for a crane possibly in our path, in case of making a emergency landing or go around.
There is also a type of NOTAM described:
Let’s do another NOTAM break down:
(B1293/25 NOTAMR B0960/25
Q)EHAA/QPIAU/I/NBO/A/000/999/5215N00603E005
A)EHTE B)2512300950 C)2603301200EST
E)IFR APPROACH PROCEDURE RNP RWY 26 NOT AVBL.)
| NOTAM line | Description |
| (B1293/25 NOTAMR B0960/25 | Series, number, (Replacement) |
| Q)EHAA/QPIAU/I/NBO/A/000/999/5215N00603E005 | FIR Amsterdam, Procedure instrument, Approach, Unavailable, IFR, NOTAM briefing relevant, operational significance |
| A)EHTE | Teuge Airport |
| B)2512300950 | Start time: December 30 2025 at 0950 UTC |
| C)2603301200EST | End time: March 30 2026 at 1200 UTC (Estimated) |
| E)IFR APPROACH PROCEDURE RNP RWY 26 NOT AVBL.) | Instrument approach not operational |
In NOTAMs there will be used some abbreviations of general subjects that are used often:
| Abbreviation | Full description |
| AD | Aerodrome |
| BTN | Between |
| DLY | Daily |
| EST | EST |
| EV | Every |
| FLG | Flashing |
| HEMS | Helicopter Emergency Medical Service |
| PJE | Parachute Jumping Exercise |
| PN | Prior Notice |
| PPR | Prior Permission Required |
| UAS | Unmanned Aircraft System |
| U/S | Unserviceable |
| WEF | With Effect From |
| WIP | Work in Progress |
| WO | Without |
Some information is crucial to pilots but are not mentioned in the AIP or NOTAMs. Some practical messages. These will be distributed through the AIP but in his own tab:
Some practical things which could be mentioned there:
These AIC notifications are mentioned in 2 categories:
You see, same strategy as the NOTAMs.
For VFR flights, some different maps are published through the LVNL website (or other website for different countries).
Each pilot is required to have the charts on board for the departure and destination aerodrome and execute the flight according to these charts.
Here we have all rules according to flight preparations which are effective to the pilot in command (PiC).
The pilot in command is responsible for the following actions:
The Pilot in Command is required to study the weather forecast of the departure, arrival, alternate (1, 2, 3) and en-route circumstances. This can be done though METARs of airports, TAFs or simple methods like buienradar.nl (don’t use it as your main source).
At some point in flights, the pilot in command is required to notify the autheorities of some possible things happening. He can do this himself or give this to the “pilot-monitoring”, but the PIC is responsible for the execution of all tasks.
The Pilot in Command is required to select an alternate airport in case a flight cannot be proceeded to the planned destination. It must have a alternate airport selected in the planning stage but is allowed to change this during the flight in case of technical failures, bad visibility or other problems.
The Pilot in Command is required to have enough fuel/energy on board to complete a flight, with enough space to also reach the altername without using the final reserve fuel (30-45 minutes).
By calculating the fuel, take the following things into account:
The final reserve fuel is the last 30 (day) to 45 (night) minutes of fuel you have on board of your plane. In normal circumstances this may never be used. The PIC is responsible for having enough fuel/energy on board to ensure a safe landing.
If the holding usage is not known, you can use the best range speed. This is around 65-75 knots in a Cessna 172).
The PiC is required to calculate the fuel usage and to prepare this into blocks. It must be known exactly what the final reserve fuel is, so in-flight this is clear.
If the final reserve fuel is used in flight the pilot must announce an emergency and land as soon as possible. This comes with a lot of debriefing processes and possible fines or penalties as result.
If landing on a controlled airfield, the pilot in command must notify ATC about minimum fuel. This is done by adding the words “MINIMUM FUEL” to the initial message, and possibly repeat this one or 2 times.
When tanking with a flight of passengers, the following rules apply:
The plane must have enough oxygen and tools on board, especially in these situations:
The plane may only start the take-off roll when no sign of ice is detected. Ice will negatively decrease lift and controlability of the plane.
If this happens in the air, the PiC must ASAP descend to an altitude the ice melts or even do a emergency landing.
The pilot in command will never proceed the flight if he is not medically able to complete a flight. This can result in a emergency landing.
In Annex 6 of the Chicago treaty, there is described a minimum of instruments and tools on board before allowed to take-off. These are:
| Instruments | Tools | Required at Day/Night |
| Magnetic compass | Clock, which counts hours, minutes and seconds | Day and Night |
| Altitude indicator | Spare circuit breakers (every type applicable) | Day and Night |
| Speed indicator | First aid kit (within reach) | Day and Night |
| - | Fire extinguisher | Day and Night |
| Artificial horizon | Navigation lights | Night only |
| Turn coordinator | Landing lights | Night only |
| Gyro compass | Strobe lights | Night only |
| Vertical speed indicator | Instrument lights | Night only |
| Vacuum/electric | Electrical torch for every crew member (phone) | Night only |
The instruments and tools are not related.
Single engine planes which fly above water outside of glide distance to land (for a Cessna 172, 1.5NM per 1000ft altitude in good conditions), must have life jackets for every people on board. This must be within arms reach so it can be put on while having the seatbelt on.
Long flights (more than 50NM or 30 minutes) above water must have an additional risk assessment by the pilot in command (pic) like:
Sometimes we need to fly above areas where there is no-one in the vicinity. In this case the plane needs to have:
When flying a plane, the following documents (of every pilot) needs to be on board before even starting an aircraft (Page 131):
Now you definitely don’t want to take all those documents with you the whole time. You are allowed to have (digital) copies of the official documents in the plane while the official document is in the office. The only documents that needs to be the original:
Also according to NPA 2024-02, you are always required to have the latest published checklist for your aircraft on board.
For controlled flights (A to D airspace), you are required to have a VHF installation which can do two-way communication in the 118.000 to 137.000 MHz range and has 8.33KHz channel separation.
Also planes needs to have a Emergency Locator Transmitter on board. They have to transmit on 121.5 MHZ and 406 MHz.
A plane is also required to have an transponder on board with mode S (Code/Pressure altitude/Ident).
All planes have to enable their anti collision lights (strobe) during the day, if it has them built in.
During night flights (after sunset), enabling landing/taxi lights is required.
Navigation lights must be enabled as the plane starts the take-off roll till the moment it stops the landing roll.
The lights layout of an plane is:
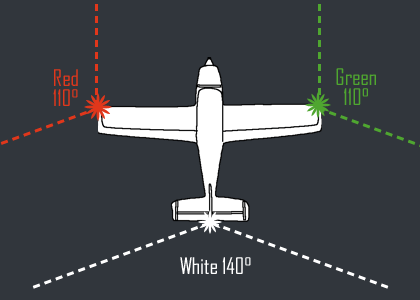
The navigation lights can be both static and flashing.
In aviation, there are some procedures that needs remembering for different scenarios. You always must know what to do in certain situations.
We will talk about:
When a plane collides with a bird, the plane can be moderately or heavily damaged. A famous example of a succesfull landing after a bird strike is the Hudson miracle, where an Airbus A320 hits a fluck of birds after take off and loses both of its engines.
https://nl.wikipedia.org/wiki/US_Airways-vlucht_1549
So, if an Airbos A320 gets critical problems with birds, we certainly do with our Cessna.
The best thing is to try to avoid bird strikes at all times, however this may be impossible. The most chances of having to deal with birds in the Netherlands are:
On the VFR chart are some tips about high concentrations of birds measured and in the AIP under ENR 5.6 and ENR 6-5.3 there is actual reported information about bird migrations and riskfull areas.
Most bird strikes happen under 2500ft AGL. The highest chance is within the ground and 1000ft. The LVNL has some security measures because of this, it forbids flying over Zeeland and the Waddenzee below 1000ft AGL.
Sometimes high bird risks are mentioned in the NOTAMs, especially if they are reported to be around an aerodrome.
A forecast about bird migrations can be found here: https://www.flysafe-birdtam.eu/
On a controlled airport, tge ATC, ATIS or NOTAMs can also mention birds as possible risk. ATC can also cancel your take-off or landing clearance if birds are detected. This can also happen on Final, so a go around is mandatory.
Bird strikes are part of the notification requirements. (161)
An emergency landing is known as a landing where your plane doesnt have forward power, so no engine(s) and a landing must be done. This is in case of an engine failure, smoke or fire.
We call a emergency landing on water “ditching”.
The pilot in command is responsable for the plane, passengers and goods until the authorities took this over.
The pilot in command is also required to notify ASAP the Onderzoeksraad voor veiligheid (OVV) and the national aviation authority (LVNL in the Netherlands).
An precautionary landing is a landing with power where resuming the flight is not safe, and the aircraft must be land to avoid the problems to be worse. This can be things like:
Before doing a forced landing of this kind we need to do the following steps:
Take-off and landing performance of a plane is very dependent on how the runway state is. Planes perform much better on a dry runway than on a wet or contaminated runway.
To brief pilots and ATC about runway states, we use 4 different states:
Types of runway contamination:
For the states of runways in winter weather we have a SNOWTAM. These are spreaded using the same channels as normal NOTAMs. An example of a SNOWTAM:
Next to runway contamination states, we have also braking action. This is an index-number about how good the brakes work in a runway (higher is better)
| Runway condition code | Pilot report of runway braking action |
| 6 | Perfect |
| 5 | Good |
| 4 | Good to Medium |
| 3 | Medium |
| 2 | Medium to Poor |
| 1 | Poor |
| 0 | Less than Poor |
The problem with these codes is more or less that these are relative. On the same runway, the one pilot may say braking action 4 where another pilot with a much heavier plane may report 2.
Planes that are not checked and certified with a valid sound document are forbidden to fly. Only some older planes can get a sort of exclusion, a sound description.
To class airplanes based on their sound production, we have 8 sound classes, where silent is class 8 and very loud is class 1. The actual number is the number of decibels and this decides the class itself.
Sometimes an airport takes some measures for not producing too much sound. It can take some runways as preference, select different departure or arrival routes. A plane may also not make a turn lower than 500ft. (148)
In case of a plane or multiple planes in danger, the procedure “Search and Rescue” will be started. This starts with 3 emergency phases:
ATC (FIC,ACC,TWR) is responsible for the alerting and notification services. If an uncontrolled flight without flight plan was being performed, the aerodrome leader is responsible (tower or a specific person).
If an airplane is transferred to tower and does not contact tower or radio contact is lost and the plane does not land within 5 mintes, TWR must contact the ACC or FIC about this incident.
Tower is responsible for notifying fire trucks and or rescue operations in case of these situations:
The alerting messages will be transferred to the Rescue Coordination Center (RCC) and there the search and rescure procedure will be started. The official Joint Rescue Coordination Center JRCC in the netherlands is located in Den Helder, doing both maritime and aeronautical search and rescue operations.
The RCC itself is purely a coordination center and only notifies other parties like the Knoninklijke Marine, Luchtmacht, Douane or the police.
You have reached the end of the page. You can navigate through other blog posts as well, share this post on X, LinkedIn and Reddit or return to the blog posts collection page. Thank you for visiting this post.
If you think something is wrong with this post or you want to know more, you can send me a message to one of my social profiles at: https://justinverstijnen.nl/about/
If you find this page and blog very useful and you want to leave a donation, you can use the button below to buy me a beer. Hosting and maintaining a website takes a lot of time and money. Thank you in advance and cheers :)
The terms and conditions apply to this post.
For a live overview of my flight lessons, visit: https://flighttools.justinverstijnen.nl/flightlessontracker
This page can contain a collection of personal notes, steps to remember, finished and unfinished content. Please excuse brevity.
Do not use specific information given like fuel flow, landing/take-off distances for your flights. Always refer to the POH of your exact plane for flight preparation. My information is just for references that I used.
This page contains only some theoretical additions to this page: https://justinverstijnen.nl/flight-rt-course-notes/
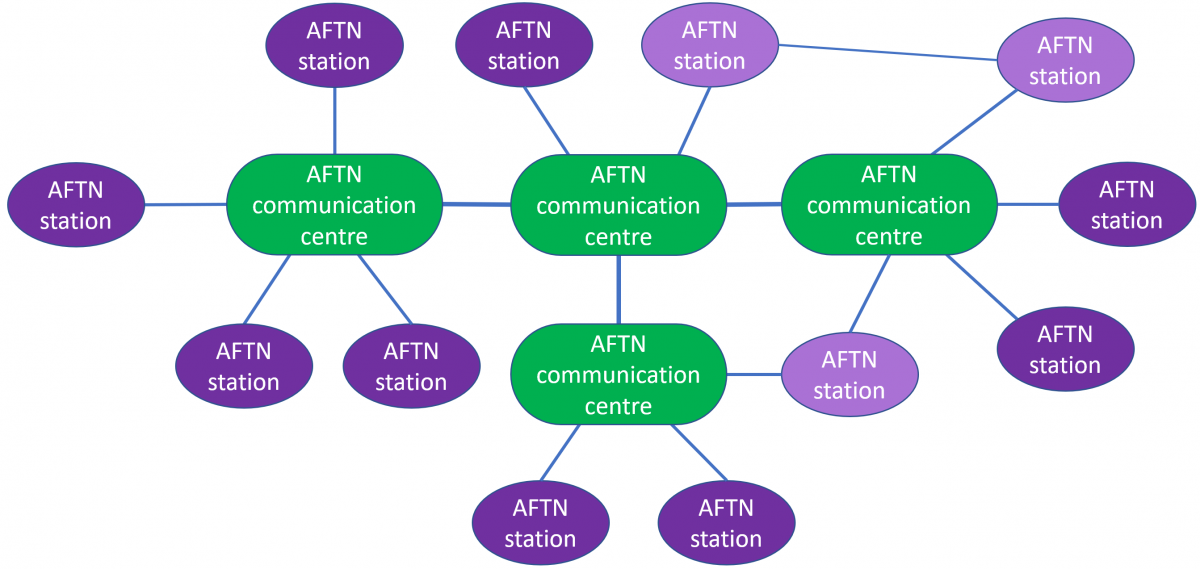
When you want to cross a runway, you have to request this:
When a radio frequency must be silent due to emergencies, the following will be called:
Also mention these items in a distress message (when possible):
When the hour of transmitting is known, we can skip that and only call out the minutes:
For the readability scale, review this table: https://justinverstijnen.nl/flight-rt-course-notes/#readability-scale
For the message types and order: https://justinverstijnen.nl/flight-rt-course-notes/#module-2-message-categories-and-priority
VHF frequencies will travel in a almost straight line, lower frequencies like VLF and LF will follow the ground course
When getting a objective to reset transponder, call out where XXXX is the code:
When getting the objective to hold position and cancel your take-off, call out:
Make sure, air-ground is duplex and air-to-ground is simplex: https://justinverstijnen.nl/flight-rt-course-notes/#module-5-definitions-and-abbreviations
Few clouds is 1/8 or 2/8 octa’s, scattered clouds is 3/8 or 4/8, Broken clouds is 5/8, 6/8 or 7/8 octa’s, overcast is 8/8. https://justinverstijnen.nl/flight-rt-course-notes/#weather-types
Vacate will always be used to “leave a runway”. When leaving a circuit, we call out, leaving your circuit area.
When asking to stop squawk charlie, we have to disable the pressure altitude setting. This can be to set from ALT to Standby.
There are some abbreviations which we (aircrafts and ATC) don’t spell letter by letter because of the often use. These are:
| Abbreviation | Full definition |
| ADF | Automatic Direction Finder |
| ATC | Air Traffic Control |
| CB | Cumulonimbus |
| CTR | Control Zone |
| DME | Distance Measuring Equipment |
| EET | Estimated Elapsed Time |
| ETA | Estimated Time of Arrival |
| ETD | Estimated Time of Departure |
| IFR | Instrument Flight Rules |
| ILS | Instrument Landing System |
| IMC | Instrument Meteorological Conditions |
| NDB | Non Directional Beacon |
| QDM | Magnetic groundcourse to beacon |
| QFE | Pressure on ground level |
| QNH | Pressure on mean sea level (AMSL) |
| TMA | Terminal Control/Maneuvering Area |
| UTC | Coordinated Universal Time |
| VFR | Visual Flight Rules |
| VHF | Very High Frequency (30MHz-300MHz) |
| VMC | Visual Meteorological Conditions |
| VOR | VHF Omnidirectional Range |
All around the world, we use 7 different airspace classes, devided into the letters A to G. To make it clear what every airspace is for, please refer to this table:
| Class | IFR/VFR | Separation | Traffic Control/Information | Clearance required? |
| A | IFR* | All traffic | Control | Yes |
| B | IFR/VFR | All traffic | Control | Yes |
| C | IFR/VFR | VFR from IFR | Control for IFR Information for VFR | Yes |
| D | IFR/VFR | None | Information about VFR and IFR traffic | Yes |
| E | IFR/VFR | None | Information | No |
| F | IFR/VFR | None | Information | No |
| G | IFR/VFR | None | Information | No |
*VFR traffic only permitted with clearance from ATC.
When the chart doesnt define an airspace for an area, this always will be Class G (geen in Dutch).
On the ground, driving our aircraft to the ramp, hangar or runway is called taxing. We could get some different instructions which we have to read back to ensure the pilot and ATC are on the same page, or else some huge accidents could happen.
| Action | Read back |
| Give way to *aircraft description | Giving way to *aircraft description |
| Follow the *aircraft description | Following the *aircraft description |
| Expedite taxi | Expediting |
| Taxi slower | Slowing down |
| Taxi with caution | Taxiing with caution |
| Hold position | Holding |
* Aircraft description could be something like a helicopter, a Boeing 737 or Cessna 172
When signed in to the traffic information for a region with airspace classes D to G, we could get call outs to watch other traffic. As we don’t get instructions from information to fly certain headings, only information about other traffic we have to look out ourselves.
There are some phrases we could say when coming across other traffic, based on your action. As all planes in a region are required to sign into the same frequency, they will hear your action as well.
| Phrase |
| Closing |
| Crossing from left to right |
| Opposite direction |
| Same direction |
| Overtaking |
| Fast/slow moving |
| No reported traffic |
Distress calls are used when in immediate danger when an aircraft is in immediate danger, like an engine failure or electrical failure.
We must always include the following in a initial distress message, when possible of course. Remember: 1. Aviate, 2. Navigate and 3. Communicate
An example of an distress call could be:
| Type of sentence | Actual part of distress message |
| Initial announcement of distress | Mayday Mayday Mayday |
| Callsign | PH-JSV |
| Type/Cause of distress | Engine failure |
| Intention | Making an emergency landing |
| Position | 10 miles south of Schiphol |
| Altitude and Heading | 2500ft, heading 340 |
As it may be not possible to say this message out loud during emergency, at 2500ft we would have around 3,5 miles of glide distance with a Cessna 172 and with a speed of around 65 knots we would have only 200 seconds from the start of the failure to a possible emergency landing.
Rule of thumb for a C172:
Calculation:
Approximate glide ratio: ~9:1
At 65 kt:
Time from 2500 ft:
Time available: ~3–3.5 minutes (≈ 200 seconds)
Maximum glide distance: ~3.8 NM (≈ 7 km)
Watch me demonstrating the whole procedure succesfully on MSFS 2024 in a Cessna 172:
https://www.youtube.com/watch?v=5eUdD0nZgq8
This is an great example of having aviate on the first position, then navigating and if we have time left, communicate.
When a tower assumes your radio communication doesnt work, they could give you visual messages by shining light to you. These lights could have different meanings.
| Color | Pattern | On the ground | In the air |
| Green | Flashing | Taxi clearance | Return to land |
| Green | Solid | Start clearance (start engines) | Landing clearance |
| White | Flashing | Return to the platform | Land here and taxi to platform |
| Red | Flashing | Leave the runway | Do NOT land here, unsafe |
| Red | Solid | Stop your aircraft immediately | Circle and avoid other traffic |
| Red | Flare | - | Do NOT land here, especially if cleared earlier. |
When asking for a radio direction, we could given a heading/QDM with a specific class. This tells us how good the heading can be:
This are the classes given by a ground direction finding station, but we can also get a fix when you combine multiple direction findings (QTF). The QTF is the QDR + variation.
Some ground stations have multiple stations which can directly give a fix, which will be made up by finding the direction from the multiple stations. These will give a fix with a specific class:
To learn more about Q-codes, visit: https://wiki.ivao.aero/en/home/training/documentation/Q_code_definition
You have reached the end of the page. You can navigate through other blog posts as well, share this post on X, LinkedIn and Reddit or return to the blog posts collection page. Thank you for visiting this post.
If you think something is wrong with this post or you want to know more, you can send me a message to one of my social profiles at: https://justinverstijnen.nl/about/
If you find this page and blog very useful and you want to leave a donation, you can use the button below to buy me a beer. Hosting and maintaining a website takes a lot of time and money. Thank you in advance and cheers :)
The terms and conditions apply to this post.
For a live overview of my flight lessons, visit: https://flighttools.justinverstijnen.nl/flightlessontracker
This page can contain a collection of personal notes, steps to remember, finished and unfinished content. Please excuse brevity.
Do not use specific information given like fuel flow, landing/take-off distances for your flights. Always refer to the POH of your exact plane for flight preparation. My information is just for references that I used.
Navigation and Flight Planning is a very important part of preparing your flights and knowing where to go in the air. When a flight is not properly prepared you can get several different kind of issues. These are the most pilot-caused problems in the air:
When planning a flight, we always make a A to B flight with an alternate as C. The alternate is mostly an airport in the vicinity of B, but can also be A. As we might revert back to A, we need to have at least double the fuel as we need for getting from A to B.
Runways are straight pieces of grass, asphalt or bitonimous where a plane can take off or land on. They always have 2 numbers, like 04 and 22. This indicates the magnetic heading of the runway based on magnetic north. This is by design so you could land a plane without navigation and only with your magnetic compass.
Runways have some characteristics which we should take into account before taking off and landing to make sure we can succeed or reject a take-off and that the runway is long enough for our plane to actually land.
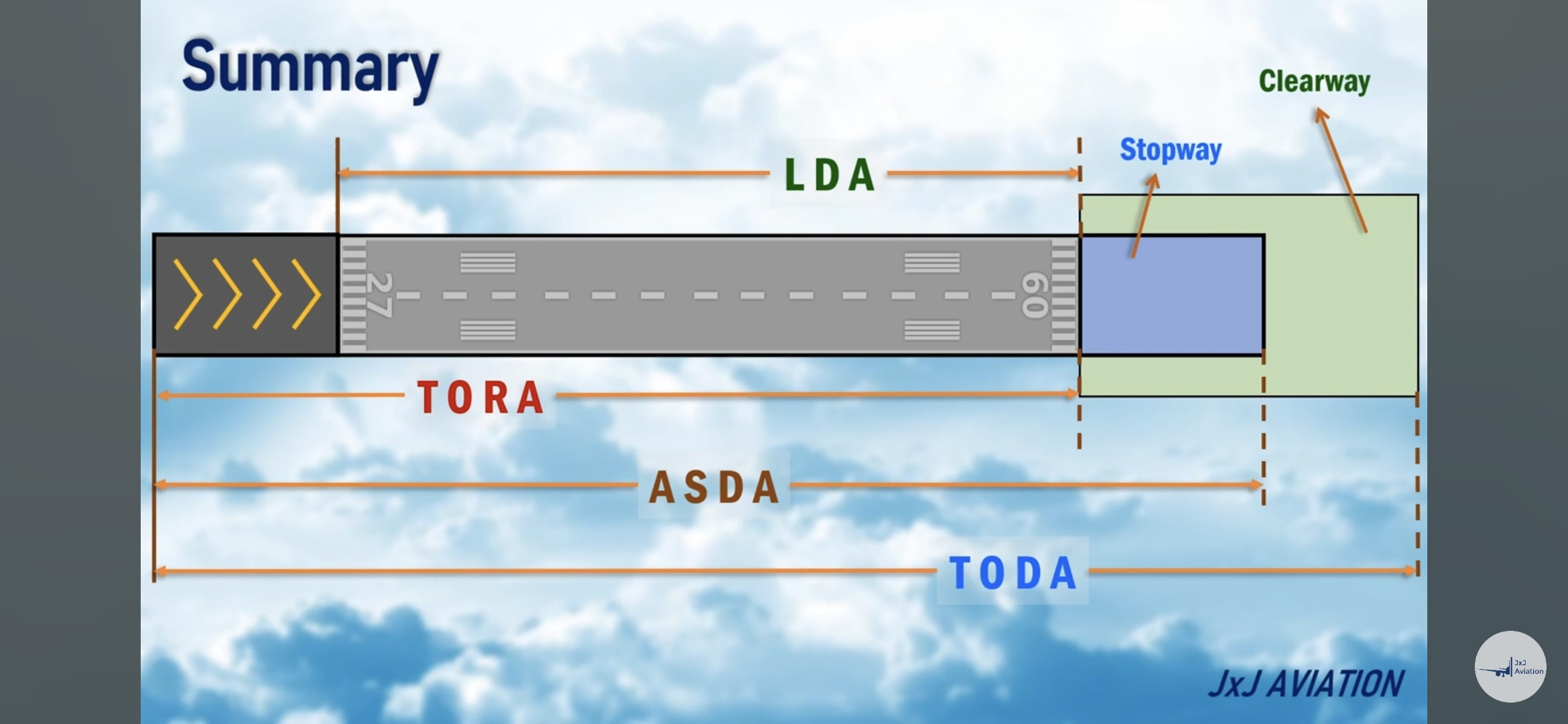
We have the following abbreviations:
When calculating your take-off and landing performances, numbers may never exceed those numbers above. You can find the actual numbers in the AIP.
Worldwide, we have the same default settings for our standard atmosphere on sea level:
On around 18.000ft the airpressure is half of sea level pressure (500hPa), and on 36.000 ft, the temperature is around 56,5 degrees celsius.
We have multiple layers in the air:
Pressure altitude is the altitude corrected to the International Standard Atmosphere, namely 1013 hPa (which is also called QNE). For performing take-off calculations, we will want to know how our plane performs which can be different with different pressures. This is a live indicator of being above or below earth’s standard atmosphere.
In short:
In an airport which mostly is lower or higher than mean sea level, there will be a small correction needed. For example, our airport is at 17 feet above sea level, and the actual pressure is 1032 hPa on sea level at a day with nice weather, the pressure altitude is -489 ft. This means our take-off performance will be better as we have more air molecules which is better for our engine.
In the same example with a pressure of 968 hPa on sea level, we will have a pressure altitude of 1238ft. This means our aircraft will perform as it takes off at 1238ft above sea level, which will have some disadvantages. As there is less air, we will need a longer runway, our engine performance is less and our lift will be less as there is less air. However, flying in relative high pressure altitudes is good for having speed, as drag decreases in lower pressure.
As you can already see, this example gives two completely different scenario’s with around 1700ft difference. In countries like the USA where airstrips can be at 5000ft altitude, the pressure can be a huge difference which we must take into account.
Check out this tool to calculate and visiualize Pressure/Density altitude: https://flighttools.justinverstijnen.nl/pressuredensityaltitudecalculator
Now we know the pressure altitude, we need to correct it for Density altitude, because warmer air is thinner than colder air. This is because warmer air expands, just take a look at a hot air balloon. This means that on 5000ft pressure altitude and on a hot day of 35 degrees, the density altitude (also known as “performance altitude”) will be almost 9000ft. So we can expect our plane to behave as it is on 9000ft in normal ISA conditions.
Thinner air means less oxygen and less air molecules, denser air means more air for lift for both propellor and the wings. Less oxygen also means less engine performance but a higher true airspeed due of less resistance from air molecules.
To calculate the density altitude from pressure altude, you can use the E6B or the tool below:
Check out this tool to calculate and visiualize Pressure/Density altitude: https://flighttools.justinverstijnen.nl/pressuredensityaltitudecalculator
Tip: Use an E6B calculator for a quick and thorough calculation of Density altitude based on the outside air temperature (OAT) and pressure altitude.
GPS coordinates are made to navigate and pinpoint certain places in the world. In aviation, we mostly use these 2 possible notations;
The equator and 0-meridian is the actual 0 point of earth. From there we look up the coordinates:
For reference, the Netherlands lies between 50 and 54 degrees North, and 4 and 7 degrees East.
In a degree goes 60 minutes, where each minute is around 1 nautical mile (zeemijl), and this is 1852 meters. This is measured on a meridian, not on the parralels.
The transponder on board of an airplane is used by Secundary Surveillance Radar (SSR) to identify the blips shown on the map. In the plane, a device called the Transponder is turned on and sending out signals in pulses at around 1090MHz. This pulse consists of 4 digits and the transponder has several modes:
Mode C also contains the code and mode S also contains the pro’s of mode C, this is cumulative.
ATC can ask for your transponder capability, you can say “Transponder capability Sierra” for Mode S transponders.
To project the globe which is a round object, we can use multiple different projections, each with their pro’s and cons.
| Type | Pro’s | Cons |
| Mercator (Cylindrical) | Conform = Hoekgetrouw* Medians and parralels are straight lines | Greenland looks equal size to Africa but Africa is 14 times the size Poles are not shown correctly |
| Lambert (Cone) | Conform = Hoekgetrouw* Partly Equadistantie = Afstandsgetrouw Medians and parralels are shown curved | More complex because of the rounded shape |
* main property
This makes clear that poth projections are great in their own use:
Then we have “Grootcirkels” and “Loxodromen” (Rhumb lines), which are different on both types of maps:
| Projection | Medians | Grootcirkel | Loxodroom |
| Mercator | Straight lines | Curved | Straight line |
| Lambert | Slope in lines because of conal shape | Straight line | Curved |
A loxodroom means that a line on a chart hits all medians under the same angle (same degrees). This is why a loxodroom is straight on the mercator chart and curved on the curved lambert chart.
Planes fly mostly loxodromische routes on one fixed heading, the magenta line on the Primary Flight Display.
In the Lambert Conformal Conic Projection, construction means that the parralels defer between the default parralels.
The shapes to remember:
Earth is no perfect ball but is a ellipsoid.
Earth has “Grootcirkels” and “Kleincirkels”
The equator devides earth into the north side and the south side. When the north side has summer, the other side has winter. We also have 2 extra parralels small circles above and below the equator:
And then we have 2 polar circles, which are a indication of the angle the sun as opposing the north/south axis of the earth (which causes the different seasons):
There are parralels at each 10 degrees that horizontally divide earth
The equator is the only groot circle which also is a parralel
There are also some meridianen which goes from north to south only, and so look like half-groot cirkels. These are comparable to the timezones
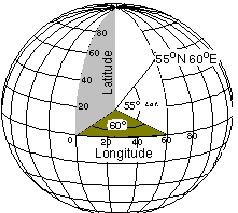
Earth turns 15 degrees per hour (1 degree per 4 minutes) so 3 degrees on the chart is 12 minutes
180 degrees median is the date-line next to new sealand. The 0 median is the UTC line
Earth is 40.075 kilometers long measured on the equator parralel
Earth is 40.008 kilometers long measured on the 0 degree meridian
This is divided into 360 degrees medians
One minute on such median is 1.852 meters or exactly one nautical mile (NM). However, this is on average. At around 60 degrees north or south, one nautical mile is actually 2 minutes, cutting this in half.
One minute on a parralel is around 1856 meters, so more distance and longer time horizontally
In aviation we have different types of norths, called the True north, magnetic north and compass north. All three sounds the same but are different of course.
To calculate courses, deviation and variation, use this tool: https://flighttools.justinverstijnen.nl/coursecalculator
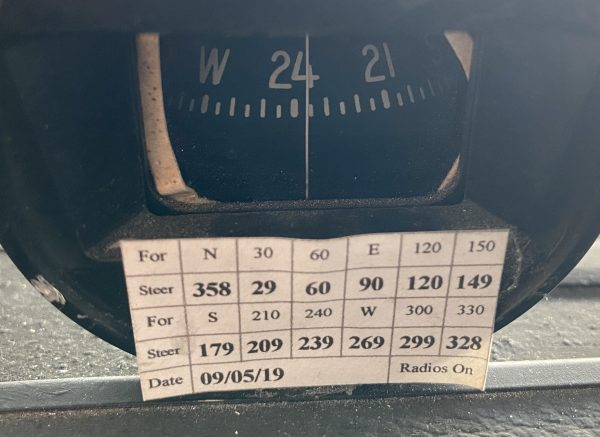
For the actual magnetic heading of 330 degrees, we have to steer 328 on the magnetic compass. This difference is mostly somewhere around 0 to 5 degrees.
Then we have multiple corrections we have to take into account:
We can make multiple calculations with these numbers:
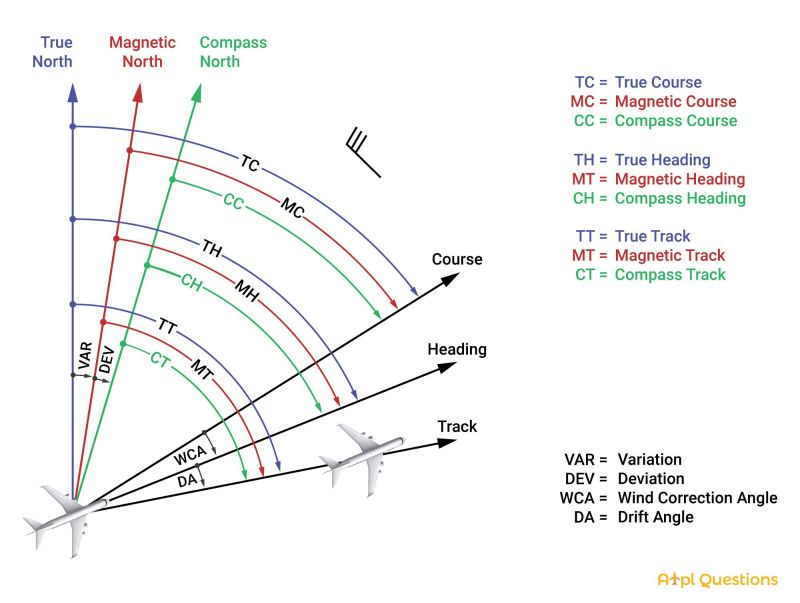
This variates between west and east. We use the guideline: East = least (-) and West = best (+) but this only applies when going from magnetic to true/planned chart route.
For true/planned chart route back to magnetic is the calculation reversed, we have to subtract west and add east. This is due to the slight west position of the magnetic course.
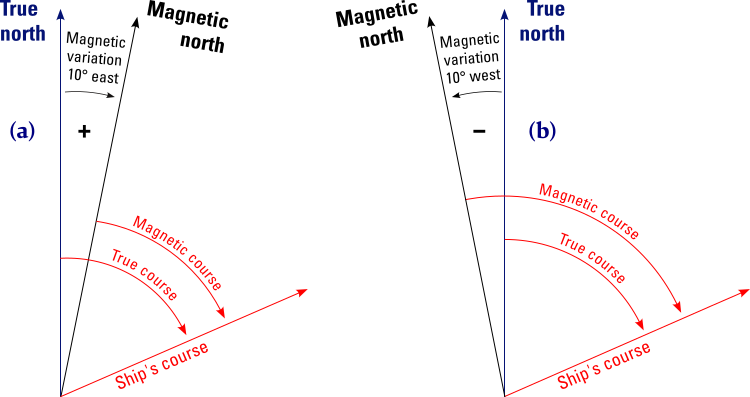
Example:
Then we can base these courses on True North (charts), Magnetic North (on board) and Compass Heading (on board).
More information on how to actually calculate this can be found here.
Also, use this tool to visualise what is happening: https://flighttools.justinverstijnen.nl/coursecalculator
For calculating units, use this tool: https://flighttools.justinverstijnen.nl/unitcalculator/index.html
In aviation, we will use these units:
Actieradius is both to and returning to your starting point (A - B and B - A)
Range is only A to B
Scale of a map is projected like this:
1:500.000 is 1 cm on the map is 500.000 cm in real life (or 5 kilometers)
The apparent solar time is the actual time based on 12 o clock noon -> highest sun point
Time notation can be done in various ways:
We can calculate the LMT from the actual time:
Uniform Daylight period is the calibrated daylight time, + 15 minutes before sunrise and + 15 minutes after sunlight.
Navigation in VFR is done based on visual references, track calculations and wind calculations. Because the wind is a mass of air where the plane flies in, we will arribe at our destination “together with the wind”. Which means we have to correct our track for the wind.
Before going into the deep explaination, let’s process all the different terms we must know:
If there is no wind, the air track, intended track and actual track are all the same value.
The movement of the plane relative to the ground is decided by three vectors:
The numbers correspond with the arrows/triangles in the drawings, but we calculate in the order 1, 3 and then 2.
The air vector’s length is based on the true airspeed and course based on the true heading. The start position is called the true position.
The wind has a speed and track, but wind is pronounced where the wind comes from. This is the opposite of planes because it makes calculations easier.
Now we know those two values, we can make an airplot. This gives us the result of the track incl. wind correction, basically the ground vector.
We can calculate the headwind and crosswind components with the sinus and cosinus to have a better understanding of the actual wind blowing against your plane:
Crosswind = sin(wind direction - ground course) x wind speed
Example: sin (270-285) x 12 = -3,1 knots
This means wind comes from the left with 3 knots blowing you to the right
Head/Tailwind = cos (wind direction - ground course) x wind speed
Example: cos (270-285) x 12 = 11,6 knots headwind
This means from the 12 knots wind, we get 11 knots onto head and 3 knots from cross.
You could also use these numbers to remember quickly (or take a E6-B on board)
| Wind angle | Factor crosswind (sinus) | Factor Head/tailwind (cosinus) |
| 30 degrees | 0,5 | 0,9 |
| 45 degrees | 0,7 | 0,7 |
| 60 degrees | 0,9 | 0,5 |
Example: your heading is 180, wind comes with 15 knots from 223. Difference is 43 degrees, we pick 45:
15 knots x 0,7 = 10,9 knots crosswind
15 knots x 0,7 = 10,9 knots headwind
If deviated from the original route, we must correct this by steering the opposite way. But how much, that is something we can calculate.
We can use the 1 on 60 rule: every degree off from the intended route will result 1 nautical mile (NM) on a distance of 60 nautical miles.
Example: After 20 NM you are 2 NM from track. We will calculate this to 60 miles, which is times 3: 6 NM deviation every 60 NM. This means also 6 degrees off track.
To correct the course, we must multiply this correction times 2 to get to the original track. This is called the track error (trekfout).
Als keep in mind that the disadvantages of wind are greater than the advantages. For example:
Automatic Direction Finders or ADF in short is a piece of hardware in the plane that can contact Non directional Beacons (NDB) beacons on the ground to find the correct direction to it. It is basically tuning the frequency when in range and then read the direction the signal comes from. The frequency of ADF works between 190 kHz and 1750 kHz (LF and MF). Most NBD beacons use a frequency between 250 kHz and 550 kHz.
The plane only contains a directional-sensitive receiving system, in these 3 parts:

the ADF has three important buttons:
Your ADF system in the plane only connects to NBD beacons (sometimes reffered as locators) on the ground. It then shows a relative bearing to the beacon, based on the heading of the plane. It basically says, turn till the plane in the middle of the indicator and the line are aligned.
Example: We fly at 173 degrees and our ADF indicator says “69”, we sum those up and that gives us 242 degrees. We have to fly 242 degrees on our compass to fly directly to the beacon. This because the ADF gives us a relative bearing, so the “langsas” of the plane is 0 degrees.
Bearing means “peiling” in Dutch.
Now we must make it harder, we can do a magnetic bearing to the NDB beacon. We take the outcome of the sum above the blue bar and put into a new sum.
Compass bearing + deviation = magnetic bearing. This magnetic bearing is the QDM, also called, the ground track to follow to reach the NDB. The reverse of the QDM is called the QDR, which is from beacon to the plan. We have to add 180 degrees to the QDM to get the QDR.
Example: our compass bearing is 242 degrees. Our deviation is 4 degrees west (indicates too much west) so we have to subtract it. The magnetic bearing is 238 degrees.
Now we could correct this number on top of all for the true north instead of magnetic north, which gives us the “true bearing”: Magnetic bearing + variation
Example variation east: Magnetic bearing 238 + variation (2,45 degrees east) = 240,45 degrees
Example variation west: Magnetic bearing 238 + variation (2,45 degrees west) = 235,15 degrees
Look at how the variation can change the headings, because we go from magnetic to true, we have to subtract west and add east. In the case of true/chart to magnetic this flip-flops.
We have 2 types of ADF indicators:

In the RMI, the green arrow is the QDM.
NDB beacons are the oldest type of beacons and are only used today as holding points. Today we have VOR/DME beacons and also the more user-friendly GPS.
NDB beacons have a range of about 10-25 NM
NDB beacons are “locators” and shows with a “L” on maps. SOmetimes they are used as approach locators.

En route beacons could have a range up to 200 NM.
A NDB beacon is not always reliable. These are factors that plays when using NDB beacons:
VOR beacons are the next evolution on top of ADF where most of the issues with ADF are fixed.
VOR stands for VHF Omnidirectional Range, and sends signals to every radial around it. It also works on VHF which makes the range and interference much better. The frequency range is 108.0 MHz to 117.975 MHz.
VORs are always based on magnetic north.
Its works basically like this: tune to the VOR frequency and your CDI will show an arrow to the beacon. On top of ADF you can select where to join the VOR radial and navigate to that. It also dhows course deviations with the needle. Also it shows if going to or from the beacon. With DME we could also measure the distance to the beacon where we will go dive in deeper in the next module.
VOR has the following advantages on top of ADF
A VOR is an hexagon on the chart. If its outlined with a square, it also has DME.
VOR beacons push out 2 different signals:
VOR navigates you to the magnetic north, so 0 degrees on the VOR radial is to the magnetic north. We also have to take the local variation of the beacon into account which also would be on the map.
The instrument to use with VOR beacons is the Omni Bearing Indicator (OBI), which contains the CDI (needle) and the selector (OBS) to set the desired radial of the beacon. It also shows “From” and “To”, to point out if you are flying to the beacon or flying away from it. Later more about that.
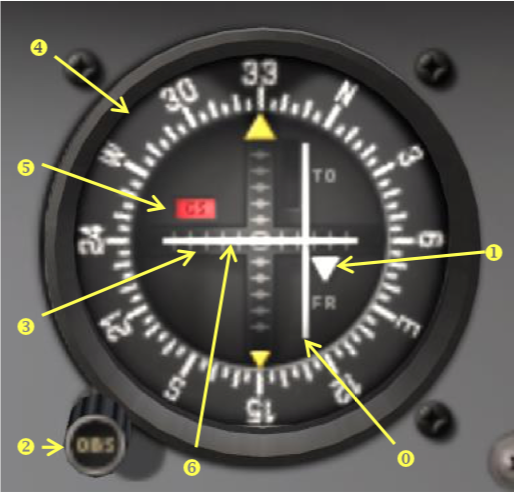
The horizontal needle represents the course/track to the beacon radial, where needle right means you are too much to the left. This is based on the view of the beacon itself. Each dot/stripe is 2 degrees off the selected radial (330 degrees in this case). The needle represents the track you must fly to get to the selected radial of the beacon.

You will select 330 degrees if you want to overfly the beacon with a heading of 330 degrees. Its as simple as that. The from region will then be 330 + and -90 degrees and the to region 330 - 180 = 150 degrees, 90 + or - that number.
The to and from indicators are shown on the right side of the indicator and will tell you if you are flying the right way. We could fly heading 0 degrees and are north of the indicator. It will then show as if we are south and flying to it. The to/from indicator will then show “From” as we are currently flying away from it. The signal will be sent into the radial but otherwise there wont be a note to tell you if the direction is correct.
As we then select the 180 degrees radial, the indicator will switch “To”. We could also use the “from” course if we need to fly 240 degrees over the beacon and then for 10 miles further.
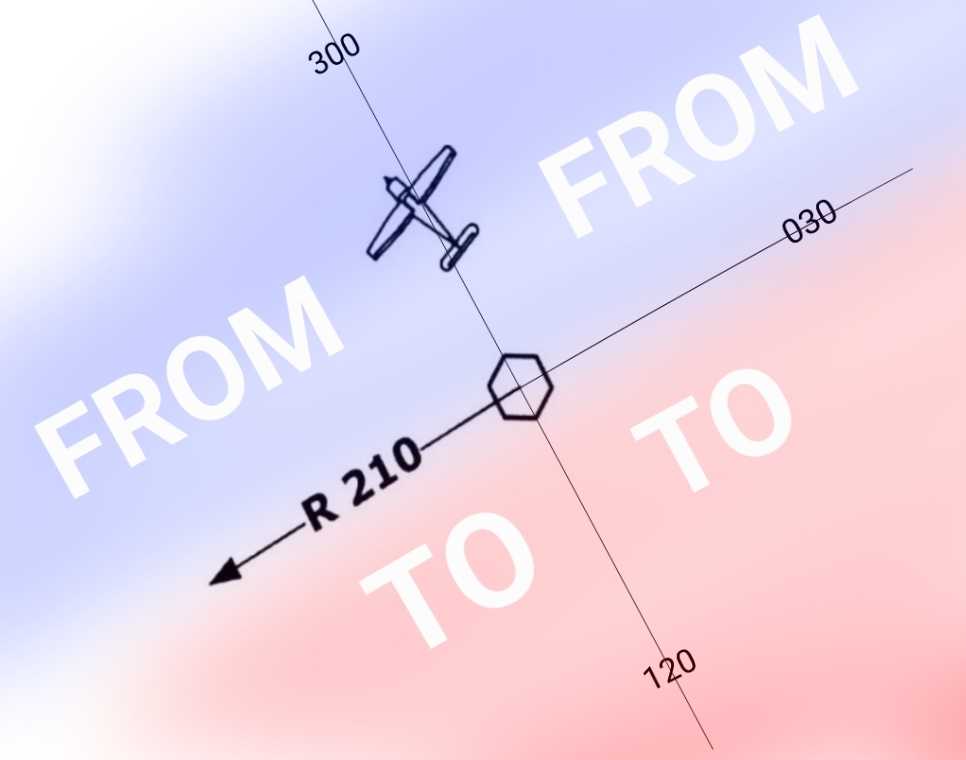
In the cockpit we have a separate radio for navigation. We need to tune to the frequency to start using the beacon. The frequency is on your VFR map or app.
We can tune to the frequency and set it as active to make the OBI adjust to the beacon. You can also press the IDENT button to get the unique morse code which is also on the map.
Using multiple VORs can help you getting a “fix”, or a real position as you know where you are relative to a beacon. Useful when you are lost or lost your visual references.
The range of a VOR beacon is the same as with normal VHF radios and can be calculated with this formula:
1,23 * (√antenna elevation in ft) + (√plane altitude in ft)
Let’s say, the antenna height is 1000ft and our altitude is 13.400ft:
1,23 * (√1000)+(√13400)= 181,27 nautical miles (NM)
In newer planes, we will have a HSI instead of a CDI. This new variant doesnt use FROM/To but always shows the correct direction with an arrow. It always leads you to the correct heading and shows if on or off course to the beacon.
GPS is a great navigational system, but comes with different possible errors:
A GPS satallite sends out 2 codes.
To get a two-dimensional (2D) fix from GPS (length and width), you need at least 3 satallies
To get a three-dimensional (3D) fix from GPS (length, width and altitude above ground), you need at least 4 satallites
The 1 in 60 rule is a quick method to estimate how far off course you are without using trigonometry.
It is based on this practical approximation:
After traveling 60 units of distance, an error of 1 unit sideways equals an error of 1 degree.
This works because for small angles, the tangent of the angle is approximately equal to the angle itself (in degrees). It relies on small-angle approximation, which is why it is accurate for normal navigation errors.
You can use these simple calculations and I have some examples below:
When you only have the amount of degrees:
For example:
You planned to fly 60 nautical miles, but you end up 1 NM off course.
Calculation: 1 ÷ 60 × 60 = 1°
Result: Your heading was about 1 degree wrong.
You flew 120 NM and are 2 NM off course.
Calculation: 2 ÷ 120 × 60 = 1°
Result: Still about 1 degree heading error.
Route: 174 NM After: 112 NM Track error (drift): 6°
Using 1-in-60:
Result: You’re about 11.2 NM off the intended track.
Because navigation contains alot of different calculations, I will write them all down here:
58 NM in 40 minutes
Example: 58 / 40 minutes x 60 minutes = 87 knots
58 NM with a speed of 87 kts
Example: 60 minutes / 87 ground speed = 40 minutes to travel 58 NM with a constant speed of 87 kts
25 minutes with a speed of 110 kts is 45,8 nautical mile
Example: 110 knots / 60 minutes x 25 minutes = 45,8 nautical miles (nm)
This formula shows how to calculate the decimal notation if you only have the time/DMS notation:
Formula: Degrees + (Minutes ÷ 60) + (Seconds ÷ 3600)
Example: 48° 51′ 24″ → ?
Step by step:
Solution is 48.8567° and we have to do this for both north/south and west/east
This formula shows how to calculate the time/DMS notation if you only have decimals.
Formula:
Degrees + (Minutes x 60) + (Seconds × 60)
Example:
40.6892°
Solution: 40 degrees, 41 minutes and 21 seconds, in short 40° 41′ 21"
To calculate from ISA (15 degrees celsius on 1013 hpa) to a certain ground temperature on a specific altitude, use this calculation.
Example 1: Ground temperature is 26 degrees and elevation is 1650ft. The QNH is 1013
1650ft / 1000ft * 2 degrees per 1000 feet is 3,3. This means it’s 3,3 degrees warmer than ISA which must be taken into account for density altitude calculations
Example 2: Outside air temperature (OAT) means on the altitude is -9 degrees and elevation is 6225ft. The QNH is 1002
1013-1002 = 11 * 30 ft hpa is 330ft difference. The pressure is lower than 1013 so we add this to the actual altitude to get the pressure altitude: 6555ft
6555 / 1000ft * 2 degrees per 1000 feet is 13.11 degrees.
ISA temp is 15 - our temp 13.11 is 1,89 degrees according to ISA. But the actual OAT is -9 so its -9-1,89 = -10,8 degrees colder than ISA.
This can now be dialed on the E6B to get the actual density altitude:
Gets you the density altitude of around 5000 feet.
Example 3: Density Altitude is 12.000, OAT is +20 degrees, calculate pressure altitude
12 x -2 + 15 (ISA) = -9
20 - (-9) = 29 degrees on the ground
120 feet per degree is 120 x 29 = 3.480 feet to subtract from density altitude
12.000 feet DA - 3.480 is 8520ft pressure altitude
115 knots
73 Nautical mile
distance : speed = time (decimal) * 60 is time in minutes
73 : 115 * 60 is 38 minutes
320NM
2 hours and 23 minutes
Hours and minutes to decimal -> 143 minutes
Distance : time * 60 = Speed in knots
Speed is 125 kts
Distance is 105 NM
Fuel flow is 2,5 GPH (US Gallons per hour)
105 : 125 = 0,84 hours -> 2,5 * 0,84 = 2,1 US Gallon (x 6 to LBS if fuel density is 0,72 kg/l)
To calculate questions about certain headings with variation and deviation into place, we can use the following abbreviation:
Let’s say, we have a True Track of 352 degrees, and we want to know some of the other values. Let’s do this:
| C | D | M | V | T | Dr | TT |
| 352 |
Now we can fill in the blanks step by step to get to the actual other values correctly and in the correct manner:
| C | D | M | V | T | Dr | TT |
| 358 | 5W | 353 | 11W | 342 | 10R | 352 |
Left to right: Subtract (-) West and Add (+)East numbers (LR -W +E) Right to left: Subtract (-) East and Add (+) West numbers (RL +W -E)
Source: https://www.youtube.com/watch?v=FtBFgr61bW8
Use this tool to calculate this stuff: https://flighttools.justinverstijnen.nl/coursecalculator/index.html
The Total compass error is the sum between true heading and compass heading, exactly in this format. A positive digit will give you an east error and a negative digit will give you a west error.
Vuistregel: 4 ft correctie per °C temperatuurafwijking (per 1000 ft hoogteverschil)
Dat betekent:
CH 098°; deviatie +2°; variatie -8°; drift 5° L. Bereken de TT.
Kompasluchtkoers (CH) 317°; deviatie +3°; variatie 5°W; drift 10°R. Bereken de ware grondkoers (TT).
TH 358°; MH 352°; deviatie +3°. Bereken de miswijzing.
CH 317°; deviatie +3°; variatie 5°W. Opstuurhoek 10°R; er is geen trekfout. Bereken de TT.
CH 054°; deviatie +3°; variatie 5°E. Bereken de TH.
CH 224°; deviatie -3°; variatie 4°W. Bereken de TH.
CH 098°; deviatie +2°; variatie -8°; drift 5° L. Bereken de TT.
Made a tool to exactly understand this topic: https://flighttools.justinverstijnen.nl/coursecalculator
With the E6B flight computer, we can calculate a lot of different things. On the front side, we can calculate and convert units. The other side is used to calculate true heading based on true track and the wind component. Also we get an indication of what our speed will be.
To do examenvoorbereiding:
You have reached the end of the page. You can navigate through other blog posts as well, share this post on X, LinkedIn and Reddit or return to the blog posts collection page. Thank you for visiting this post.
If you think something is wrong with this post or you want to know more, you can send me a message to one of my social profiles at: https://justinverstijnen.nl/about/
If you find this page and blog very useful and you want to leave a donation, you can use the button below to buy me a beer. Hosting and maintaining a website takes a lot of time and money. Thank you in advance and cheers :)
The terms and conditions apply to this post.
